对抗知识焦虑,从看懂这条开始
App 下载
机器人能打网球了,这才是真正的突破
网球对抗|人形机器人|全身实时智能规控算法|北京机器人企业|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载网球对抗|人形机器人|全身实时智能规控算法|北京机器人企业|具身智能|人工智能
时速10公里的移动中,白色人形机器人的机械臂突然挥出——时速15米的网球擦着网带落在对方场地,紧接着它调整步幅,又精准接住了回球。这不是预演的动画,是2026年3月真实发生的网球对拉:北京的机器人企业让机器人完成了长达数分钟的多回合对抗。
打网球被业内称为人形机器人的“终极考题”:要在毫秒级里判断来球的速度、旋转和落点,同时协调全身20多个关节完成跑动、挥拍和平衡控制。而这一切的核心,是一套能让机器人“边看边想边动”的全身实时智能规控算法。为什么打网球这么难?这套算法到底解决了什么卡了十年的问题?
在这套算法出现之前,人形机器人的运动能力其实分成了泾渭分明的两类:一类是“套路式运动”,比如舞蹈、武术,本质是把人类预先编好的动作序列“播放”出来,技术已经相当成熟;另一类则是“对抗式运动”,比如网球,每一次来球都是随机的,机器人必须像人类运动员一样,先“看见”球,再“想清楚”怎么跑、怎么挥拍,最后“协调全身”完成动作——这正是过去十年卡在瓶颈的地方。
你可以把传统机器人的运动控制想象成按食谱做菜:每一步放多少料、炒多久都写死了,换个菜谱就彻底懵了。而打网球要求机器人像有经验的厨师,能根据食材的新鲜度、火候的变化随时调整手法。银河通用的这套算法,就是给机器人装上了“能应变的大脑”:
它靠数百赫兹的高频多模态传感器,把视觉摄像头、惯性测量单元和力觉传感器的数据实时融合,相当于给机器人装了每秒能“看”几百次眼睛、能感知身体姿态的“皮肤”;再用强化学习训练出的动作匹配技术,从百万次模拟对打中学会快速检索最适合当前场景的动作序列,把计算延迟压缩到毫秒级;最后用零力矩点(ZMP)算法实时调整关节力矩,确保机器人在快速跑动中不会摔倒——这套组合拳,让机器人终于跳出了“预编程”的牢笼。
打网球对机器人的考验,拆解开是三道几乎不可能同时完成的难题:高速感知、实时决策、全身协同。
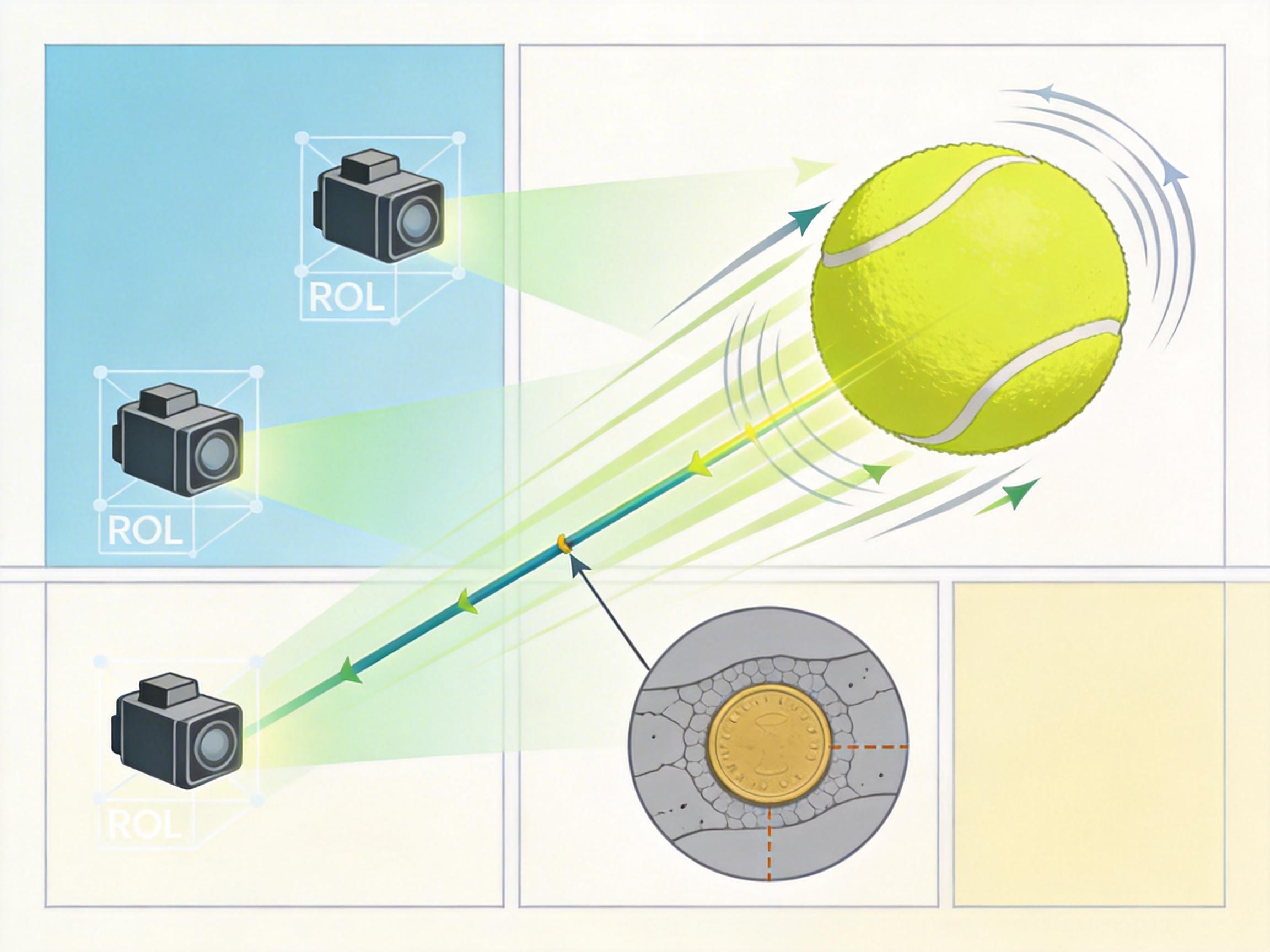
第一道坎是“看清楚球”。网球时速可达15米,旋转方向随时变化,机器人需要在0.1秒内完成球的轨迹预测。传统的视觉识别要么帧率不够,要么会被场地光线、球的旋转干扰,而这套算法用多摄像头同步捕捉+区域兴趣(ROI)处理,把定位误差控制在3-4厘米内——差不多是一枚硬币的直径。
第二道坎是“想清楚怎么动”。人类运动员能凭经验预判对手的回球路线,但机器人只能靠数据计算。算法在这里用了强化学习+模仿学习的组合:先让机器人在仿真环境里打百万次“虚拟网球”,每次失误就调整策略,直到能记住“什么样的来球该用什么样的回球”;再模仿人类运动员的动作细节,让挥拍和跑动更自然,减少不必要的能量消耗。
第三道坎是“动的时候不摔倒”。机器人在快速跑动中,重心的任何一点偏移都可能导致摔倒。算法里的零力矩点(ZMP)控制,相当于给机器人装了个“重心导航仪”,实时计算全身关节的力矩,把机器人的“稳定点”始终保持在脚的支撑范围内——这让机器人的跌倒率降低了30%以上。
但必须承认,现在的机器人还只是“会打网球”,远不是“打得好”。它能接住90%的高速来球,但还不会像人类运动员一样用假动作迷惑对手,也没法根据对手的习惯调整战术——这些“高级智能”,还需要更复杂的认知算法支持。
为什么业内要盯着“机器人打网球”这件事?因为它的技术突破,能直接平移到更实用的场景里。
比如在工厂里,过去的工业机器人只能在固定位置做重复动作,而这套实时规控算法能让机器人在移动中完成装配、搬运——想象一下,机器人能像工人一样在车间里走动,随时调整动作处理突发的零件位置偏差;在物流仓库里,它能根据货物的重量和位置,调整自己的步态和抓取力度,避免货物掉落;甚至在养老场景里,它能实时感知老人的动作,调整自己的速度和力度,辅助老人行走。
目前中国的人形机器人产业已经形成了自己的节奏:和北美企业侧重技术深度、欧洲侧重安全合规不同,国内企业靠完整的产业链和快速迭代能力,正在把实验室的技术快速落地。比如银河通用的算法,从仿真测试到实体机器人演示只用了16小时的训练时间,成本比海外同类技术低了40%以上。
但瓶颈依然存在:机器人的续航时间最多只有4小时,要实现全天候作业还得解决电池技术的问题;而且现在的算法只能应对单一对手,要实现足球、篮球这类团队对抗,还得突破多机器人协同的技术难关。
当机器人在网球场上接住第6个回球时,我们看到的不只是一个技术突破,更是人形机器人从“工具”向“伙伴”靠近的一步。过去我们总说,机器人要像人一样思考,但现在才发现,先让机器人像人一样“动起来”,才是更难也更重要的事。
运动的本质,是适应不确定的世界。 从按剧本跳舞到实时打网球,机器人学会的不只是一项运动技能,更是在复杂环境中应变的能力。未来某一天,当机器人能在工厂里灵活搬运零件、在家庭里辅助老人行走、在城市街头自主导航时,我们或许会想起2026年的这场网球对拉——那是机器人第一次真正“活”了起来的时刻。