对抗知识焦虑,从看懂这条开始
App 下载
会打网球的机器人,不止是陪练
网球陪练|清华团队|深度强化学习|LATENT算法|人形机器人|生物医学工程|AI智能体|前沿科技|人工智能
对抗知识焦虑,从看懂这条开始
App 下载网球陪练|清华团队|深度强化学习|LATENT算法|人形机器人|生物医学工程|AI智能体|前沿科技|人工智能
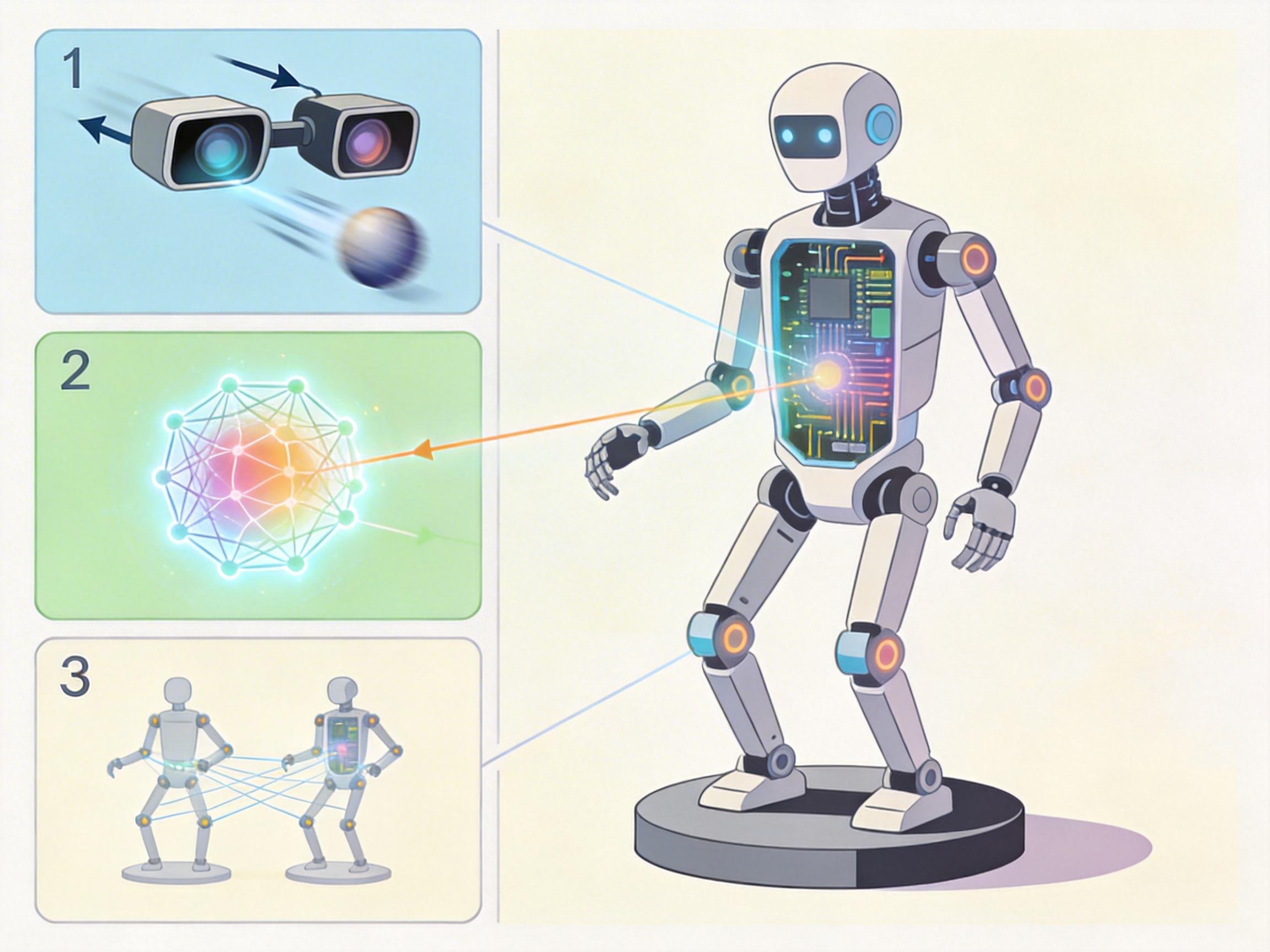
当你在网球场挥出一记时速50公里的正手,对面那个1.75米的“球友”只用0.2秒就完成了锁定、移位、回击——它不是公园球场里的业余三级球友,而是一台全身70多个关节的人形机器人。它能稳定对拉20轮以上,正手击球成功率90.9%,更关键的是,它的打球技巧不靠预编程,不靠动作捕捉,纯靠深度强化学习从人类碎片化动作里自学而成。
这不是科幻片里的场景,而是北京某团队联合清华研发的成果。支撑它的LATENT算法,核心是在低维的潜在空间里探索动作组合:先从零散的人类击球片段里提取运动逻辑,再通过深度强化学习反复试错优化,最后把这些碎片化的动作拼接成流畅的挥拍、移动。就像你看了几十段网球教学短视频,没经过系统训练却慢慢摸出了击球的节奏——只不过机器人的“试错”是在仿真环境里完成百万次模拟,再通过动力学随机化缩小仿真与现实的差距。
0.1秒锁定来球,0.2秒完成整套回击流程,这组数字背后是多模态感知与实时决策的突破。人类面对高速来球,要靠眼睛、大脑、肌肉的连锁反应,任何环节慢半拍就会漏球;而机器人的双目视觉系统先捕捉球的轨迹,算法同步计算落点,全身关节像被一根无形的线串联,脚步移动和挥拍动作精准同步。这种毫秒级的协同,意味着它已经能处理高动态复杂场景里的四大难题:视觉追踪、全身平衡、动作协同、实时决策。
很多人会问,春晚的机器人早就会打武术了,一台会打网球的机器人值得关注吗?答案是,网球是机器人的“地狱难度测试场”。武术表演是预设好的动作序列,端茶倒水是静态或简单动态任务,而网球的每一次来球都是不可预测的:球速、旋转、落点随时在变,机器人要在移动中维持平衡,还要根据来球调整挥拍的角度和力度。能通过这个测试,就意味着它能胜任救灾现场的废墟攀爬、工厂里的复杂物料搬运——这些场景都需要在动态变化中做出实时决策。
当然它还不完美:满电只能工作1-2小时,湿滑场地容易失衡,极端角度的救球成功率不到50%。就像当年的智能手机,初代机型续航短、功能有限,但没人会否认它开启了一个时代。这台机器人的意义,从来不是取代网球教练或职业选手,就像AlphaGo没有毁掉围棋——它会成为陪练,让普通人不用花高价就能获得稳定的训练对手;它会成为工具,去完成人类难以胜任的高危任务;它更会成为一个信号,告诉我们深度强化学习正在把人形机器人从“动作执行者”推向“智能决策者”。
从网球场到救灾现场,从陪练到协作伙伴,人形机器人的进化从来不是为了模仿人类,而是为了拓展人类的边界。人机协作的未来,从来不是谁取代谁,而是各自站在擅长的位置,把不可能变成可能。