对抗知识焦虑,从看懂这条开始
App 下载
机器人闯家庭:从模仿到懂物理的关键一跃
斯坦福报告|物理常识|世界统一模型|家用机器人|AI智能体|人工智能
对抗知识焦虑,从看懂这条开始
App 下载斯坦福报告|物理常识|世界统一模型|家用机器人|AI智能体|人工智能
当你下班回家,希望机器人能把散在沙发上的衣服叠好,把餐桌上的碗碟放进洗碗机——这场景听着简单,却是全球机器人行业卡了十年的死局。斯坦福2026年的报告显示,家用机器人在真实家庭里完成日常任务的成功率仅12%,剩下88%的失败,全卡在了「不懂物理」上:它不知道杯子悬在桌边会摔碎,不知道湿衣服叠完会留褶皱,只会机械重复实验室里练过的动作。直到一种叫世界统一模型的架构出现,才终于把机器人从「模仿机器」拉向「懂物理的智能体」。
你可以把传统机器人的智能系统想象成三个独立的快递站:视觉站负责「看」,语言站负责「听懂指令」,动作站负责「动手做」。每个站点只干自己的活,信息在传递中会不断损耗——视觉站看到的「半悬在桌边的瓷盘」,传到动作站可能只剩「一个盘子」,至于会不会摔碎,它完全没概念。
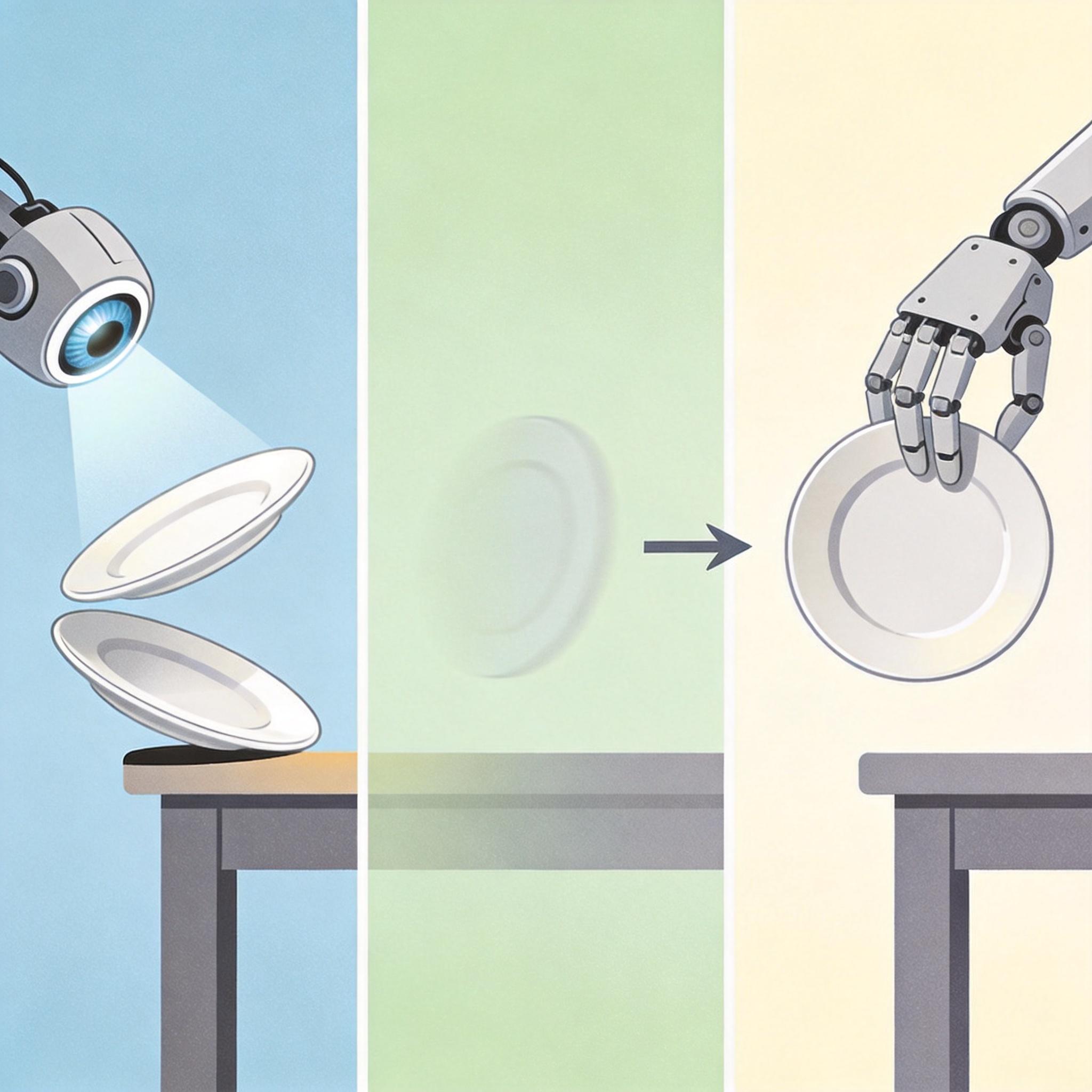
世界统一模型(WUM)则是把三个快递站拆了重建,改成一个打通所有环节的智能仓库。视觉、语言、动作甚至物理规律,都在同一个神经网络里从零开始联合训练。就像苹果M1芯片的统一内存,数据不用在模块间来回搬运,自然没有损耗。更关键的是,它不再只是「看」和「做」,而是能理解「为什么要这么做」——它会通过训练记住重力、摩擦力这些底层规律,不用人教也知道,拿瓷盘时要托住底部,而不是只抓边缘。
这种变化是本质性的:传统机器人是「按剧本演戏」,WUM架构的机器人是「懂逻辑的演员」。它不用预编程,遇到没见过的场景,能靠对物理世界的理解自己想办法。
为什么传统机器人一进家庭就「失灵」?核心问题出在训练数据上。过去的机器人大多用「糖水数据」训练——实验室里光照固定、物品摆放规整,连地面都一尘不染。就像一直喝糖水长大的孩子,突然进了满是油烟、玩具满地的真实家庭,瞬间就乱了阵脚。
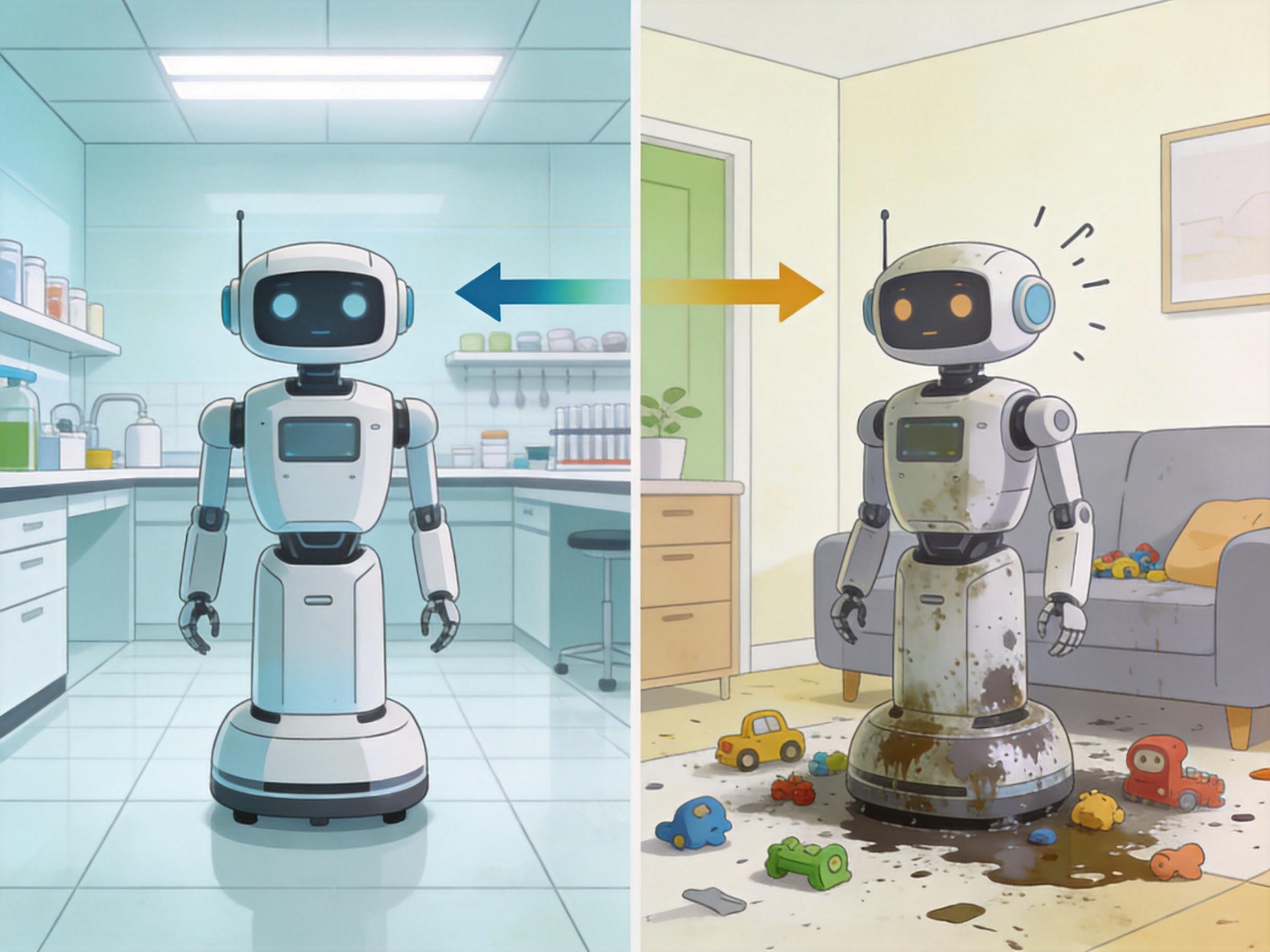
WUM架构的机器人靠「牛奶数据」喂大:研发团队深入数百个真实家庭采集数据,有的家里猫会突然跳上餐桌,有的厨房一半是暖光一半是冷光,有的地面散落着快递盒和乐高块。这些嘈杂、混乱甚至充满「意外」的数据,恰恰是机器人理解真实世界的关键。

更聪明的是,它的学习是「在线进化」的:如果第一次叠湿衣服失败了,它会自动调整手法,下次就知道要先抖开再叠;成功的经验会直接更新到模型里,不用工程师把它拉回实验室重训。这种「做中学」的模式,让它能像人类一样,在真实家庭里越用越聪明。
当然,这种模式也有局限:真实家庭数据采集成本极高,隐私保护更是绕不开的坎。目前的解决方案是端侧脱敏——原始图像绝不离开机器人,用户主动授权才能开机,数据只归用户所有。
2027年被业界视为机器人智能的关键节点:世界统一模型将成为机器人的标准组件,机器人将从「专用工具」变成「通用智能体」——不仅能做家务,还能适应工业、医疗等各种场景。
但这条路并不平坦。首先是泛化能力的挑战:就算见过一万个家庭,也总会遇到第一万零一种新场景,比如突然出现的宠物、随意改动的家具布局。其次是推理效率的平衡:要懂物理就需要复杂计算,但机器人又得实时反应,目前的解决方案是轻量化推理策略,在保留泛化能力的同时把推理速度提升3倍。
还有隐私和安全的底线:机器人越懂你,就越容易接触到你的隐私。现在的端侧处理、主动授权只是基础,未来还需要更智能的隐私保护——比如能自动识别「私人区域」,进去就关闭传感器;或者能区分主人和访客,访客模式下绝不泄露任何隐私数据。
当机器人终于能像人类一样「懂物理」,我们面对的就不只是技术的进步,更是一种全新的人机关系:它不再是冰冷的机器,而是能适应你家环境、理解你生活习惯的「智能伙伴」。
懂物理,才是机器人走进家庭的门票。这一步,我们等了十年,但真正的挑战,才刚刚开始——如何让智能体更懂人类,又不越界;如何让它进化,又守住隐私和安全的底线。未来的机器人,终究要在「智能」和「人性」之间,找到最舒服的平衡点。