
1 个月前
1 个月前
2009年柏林世锦赛,尤塞恩·博尔特冲过百米终点线时,计时器停在9秒58。这个被人类视为“生理极限”的数字,17年后要被一个没有心跳的对手改写。上海亚布力论坛上,宇树科技创始人王兴兴放出话:今年年中,中国的人形机器人就能跑得比博尔特更快。
你或许会笑——机器人跑赢人类有什么难?给它装个轮子不就行了?但王兴兴说的是双足人形机器人,是和我们一样靠两条腿交替蹬地前进的机器。这背后不是简单的动力升级,而是一场关于“如何让机器像人一样跑”的技术革命。为什么是今年?机器人到底靠什么突破人类的速度天花板?
要理解机器人跑赢博尔特的意义,得先回到十年前。那时的双足机器人还在蹒跚学步,每走一步都要靠预设程序精准计算关节角度,稍有外力干扰就会摔个四脚朝天——它们更像被代码牵着线的木偶,而非能自主运动的“生命体”。
转折点出现在仿生驱动与智能控制的结合上。你可以把机器人的关节想象成人类的肌肉,但比我们的肌肉更“听话”:高性能伺服电机是它们的“快缩肌”,能在0.01秒内完成扭矩输出调整;谐波减速器则是“肌腱”,把电机的高速转动转化为关节的精准发力,零间隙的传动比让每一丝动力都不浪费。
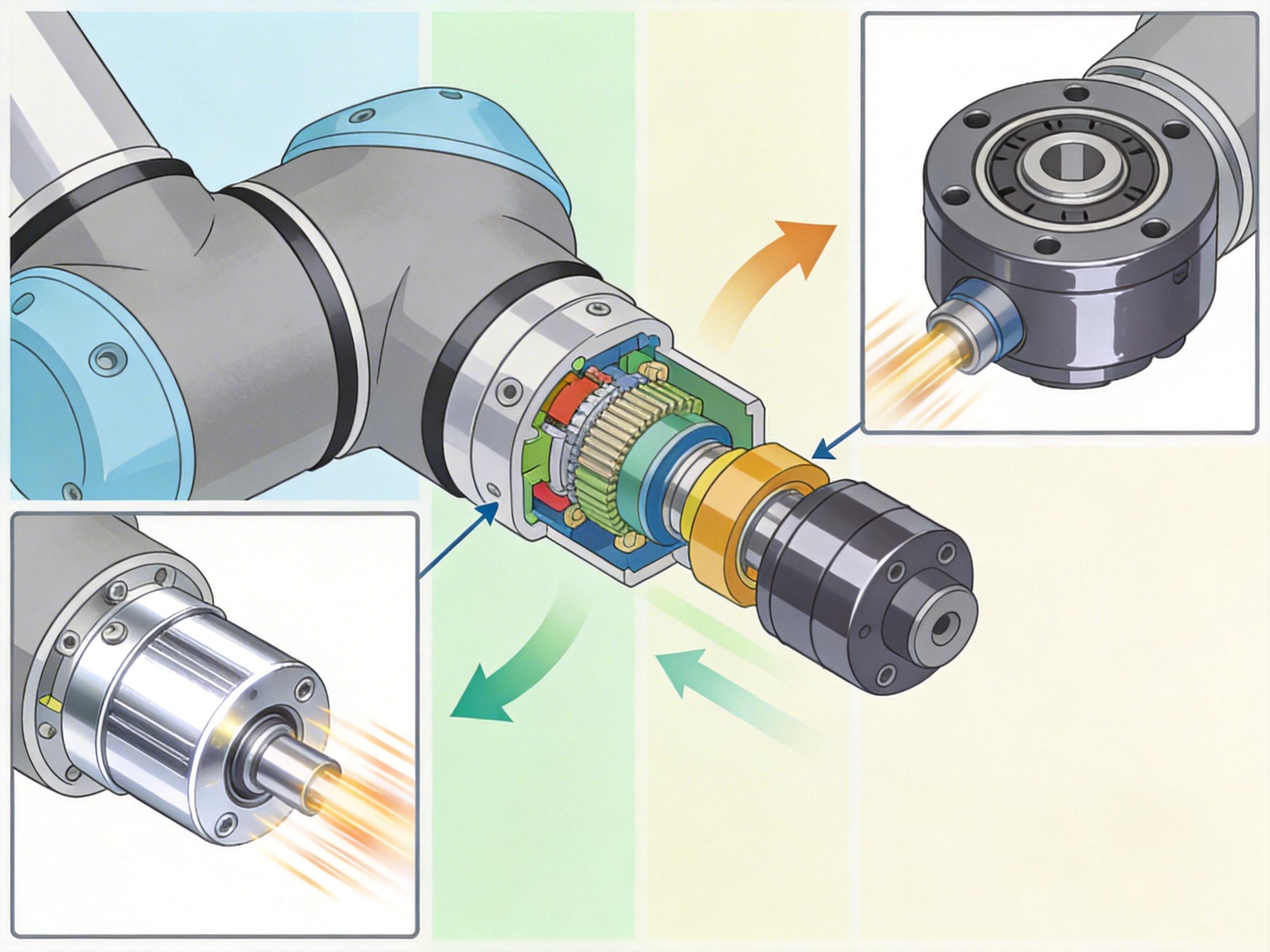
但光有强劲的“肌肉”还不够。人类跑步时靠的是身体的动态平衡——我们的大脑会根据地面反馈、重心偏移实时调整姿态,这个过程快到不需要意识参与。机器人要做到这一点,得靠模型预测控制(MPC)算法:它会提前“预判”下一步的重心位置和地面反作用力,在0.001秒内算出关节的最优角度,让机器人像人类一样“用身体思考”。
直给的技术逻辑是:
这三者结合,才让机器人从“走路”跨越到“跑赢人类”。
王兴兴的底气,不止来自实验室里的原型机,更来自中国机器人产业的“全链条爆发”。
你可能没注意到,2024年中国工业机器人产量已经超过59.5万台,是全球其他国家的总和;国产谐波减速器的市场占有率从十年前的个位数,飙升到如今的40%以上——这些看似和“跑步机器人”无关的数字,恰恰是技术突破的底气:完整的供应链让核心零部件成本比海外低30%,庞大的应用场景让算法能在真实环境中快速迭代。
更值得关注的是,机器人跑赢博尔特,不是为了和人类比速度,而是为了突破“机器只能在工厂里干活”的边界。当双足机器人能以36公里的时速奔跑时,它能在地震废墟里比搜救队员更快找到幸存者;能在物流仓库里以人类的灵活性搬运货物;甚至能在未来的战场上,完成人类无法企及的高速机动任务。
我认为,媒体都在盯着“跑赢博尔特”这个噱头,却忽略了一个关键:这是中国第一次在机器人的“通用运动能力”上走到全球前列。过去我们靠成本优势抢占市场,现在我们开始在“让机器像生命一样运动”的核心技术上制定规则——这才是真正的转折点。
但我们也没必要过度神化这场突破。机器人能在实验室的平坦跑道上跑赢博尔特,不代表它能在真实世界里“撒野”。
最大的瓶颈是续航。目前最快的人形机器人只能以最高速度跑5分钟,就会把电池耗尽——人类能跑完全马靠的是高效的能量代谢,而机器人的电池能量密度还不到人类肌肉的1%。这就像给一辆F1赛车装了个电动车的电池,跑得快但跑不远。
还有复杂环境的适应能力。实验室的跑道没有坑洼、没有积水、没有突然窜出的障碍物,但真实世界里的每一个变量,都是对机器人平衡系统的考验。现在的机器人能靠算法“预判”平坦地面的反馈,但遇到湿滑的路面、松动的地砖,它的反应速度还赶不上人类的本能。
这些难题不是靠堆硬件就能解决的,它需要材料科学、能源技术、AI算法的协同突破——而这些,才是机器人真正走进我们生活的关键。
当机器人冲过百米终点线的那一刻,我们见证的不是机器对人类的超越,而是人类对自身极限的拓展——我们把自己关于“速度”的想象,装进了钢铁和代码里。
“机器的速度,是人类想象力的延伸。”
博尔特的9秒58是生理的极限,但人类对“更快”的追求没有尽头。未来的机器人不会只停留在跑道上,它会跑进我们的工厂、我们的医院、我们的生活,用它的速度和力量,帮我们完成那些我们做不到、或者不想做的事。而我们要做的,不是担心被机器超越,而是思考如何让这些“钢铁伙伴”,成为我们延伸自身能力的翅膀。
点击充电,成为大圆镜下一个视频选题!