对抗知识焦虑,从看懂这条开始
App 下载
40亿估值的通用物理智能,到底智能在哪?
环境感知|天使轮投资|物理世界交互|丁宁|自然意志公司|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载环境感知|天使轮投资|物理世界交互|丁宁|自然意志公司|具身智能|人工智能
当你还在惊讶大模型能写代码、编文案时,AI已经悄悄把触手伸向了真实的物理世界——这就是通用物理智能,让AI跳出数字屏幕,用「身体」感知环境、操作物体、解决现实问题。2026年4月,清华大学助理教授丁宁创立的「自然意志」公司拿到了IDG、峰瑞、真格等机构的天使轮投资,估值直接冲到40亿人民币。这位2025年才入职清华的85后学者,凭什么刚创业就被资本如此看好?答案藏在他团队啃下的那些硬骨头里。
过去的AI更像个「数字空想家」——能理解语言、生成图像,但一旦要动手开个空气炸锅、叠件衣服,就变得手足无措。通用物理智能要解决的,就是把AI的「认知能力」落地成「动手能力」。
丁宁团队的核心突破,是用数据驱动的Ultra系列对齐方案,把大模型的语言理解能力和机器人的物理操作能力焊在了一起。你可以把这个过程想象成教小孩做家务:先告诉他「把衣服叠好放进衣柜」(语言指令),再通过一次次示范纠正他的动作(密集奖励强化学习),最后让他学会自己判断「这件衬衫该怎么叠」(自主泛化)。
其中的PRIME算法是关键——它不用人工给每一步动作打分数,而是让AI自己从任务结果倒推「哪一步做对了,哪一步错了」。比如机器人叠衣服时把领口弄皱了,PRIME会自动分析是抓取力度太大,还是折叠角度不对,然后在下一次尝试中调整。这种「隐式过程奖励」让机器人的学习效率提升了数倍,谷歌学术上相关论文的引用量已经超过7000次。
传统机器人都是「专项选手」——工业机械臂只会焊汽车,分拣机器人只会拿快递,换个任务就得重新编程。丁宁团队要做的,是打造能跨场景、跨平台的「通用机器人基础模型」,就像大语言模型能写小说也能写代码一样。
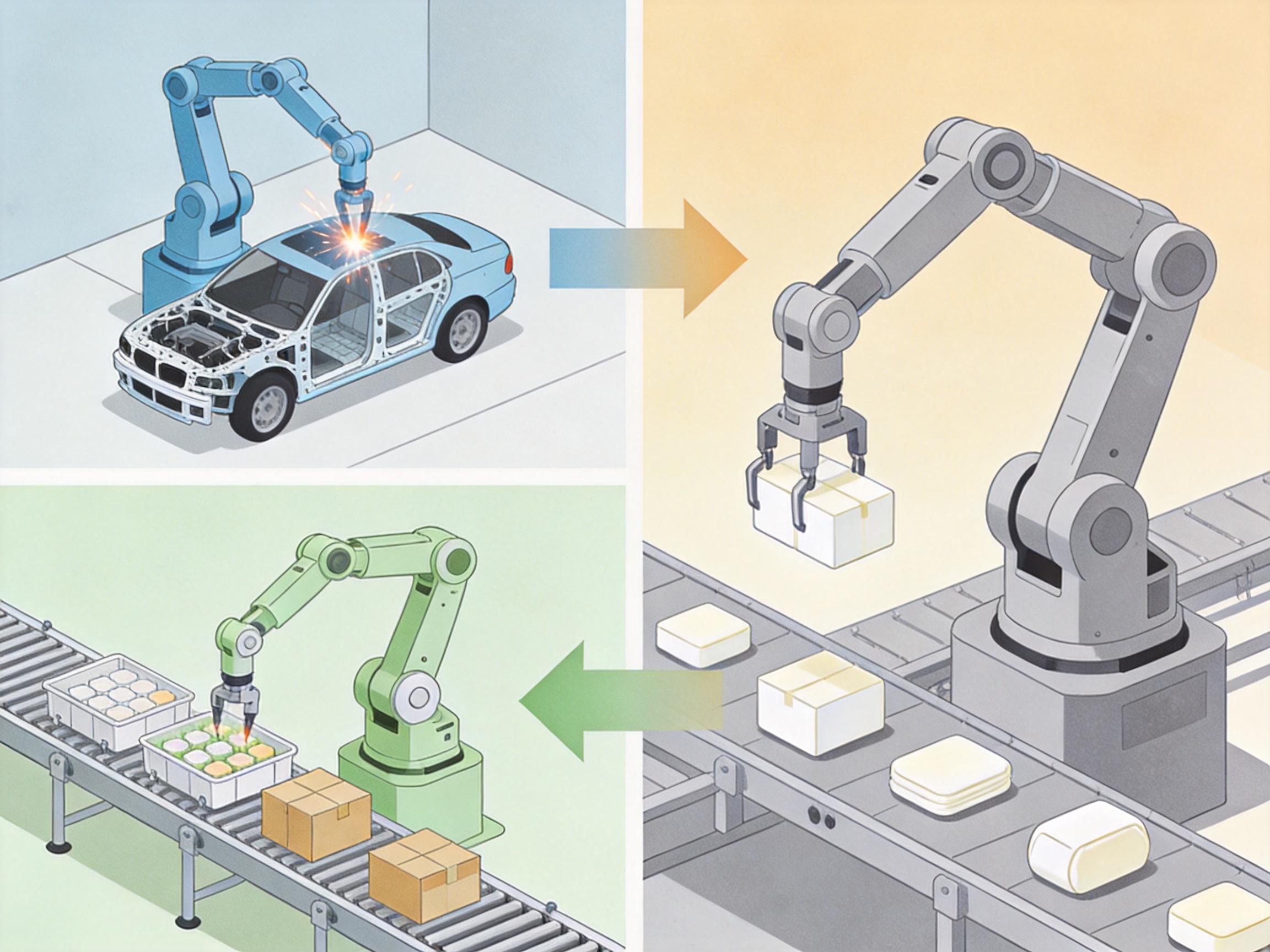
他们开发的π₀系列模型,在超过1万小时的机器人操作数据上预训练,学会了抓取、放置、折叠等几十种基础技能。更厉害的是「组合泛化能力」:它能把「打开盖子」和「放入物品」两个基础动作组合起来,完成「用空气炸锅烤红薯」这种从没训练过的新任务。就像你学会了切菜和炒菜,就能自己琢磨出一道新菜谱。
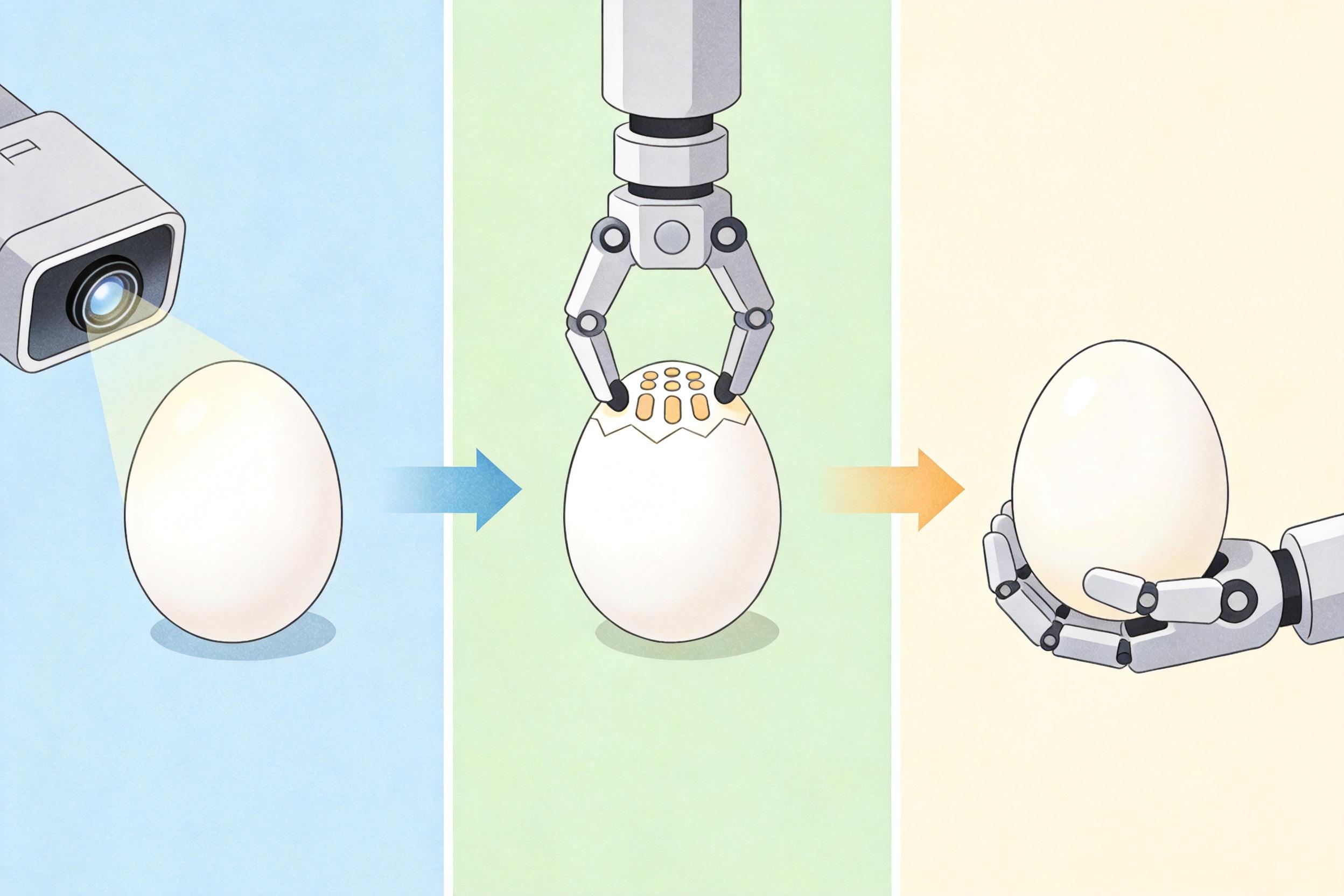
这种能力的背后,是多模态融合技术——机器人的视觉摄像头、触觉传感器、语言指令系统不再各自为政,而是像人的眼、手、脑一样协同工作。比如抓取鸡蛋时,视觉系统定位位置,触觉传感器感知蛋壳的硬度,语言系统理解「轻拿轻放」的要求,三者配合让机器人既能抓住鸡蛋,又不会把它捏碎。
40亿的估值,本质上是资本对通用物理智能赛道的押注。中国的具身智能市场2024年已经达到4186亿元,预计2027年将突破6300亿元,年复合增长率超过50%。这个赛道的吸引力在于,它能真正解决制造业升级、物流效率提升、养老护理短缺等现实问题。
丁宁团队的技术已经开始落地:和Weave公司合作的洗衣机器人,自动化率提升了42%;和Ultra公司合作的仓库包装机器人,自主运行率达到96.4%。这些数据不是实验室里的漂亮数字,而是能直接转化为企业利润的生产力。
当然,这条赛道也布满荆棘。最核心的难题是「数据稀缺」——机器人在真实世界的操作数据不像文本图像那样容易获取,每小时高质量数据的采集成本可能高达数万元。此外,AI安全也是悬在头顶的达摩克利斯之剑:如果机器人在工厂里失控,后果不堪设想。丁宁团队的开源项目「openpi」,就是想通过社区协作,共同破解这些难题。
当AI终于学会了「动手」,我们离真正的通用智能又近了一步。这不再是实验室里的科幻概念,而是正在改变工厂流水线、仓库货架、甚至家庭客厅的现实。
智能的终极形态,从来都不是在数字世界里空想,而是在物理世界里实干——让机器像人一样,既能思考,也能行动。未来的某一天,当机器人熟练地帮你叠好衣服、做好早餐时,你或许会想起,这一切的起点,是一群学者在实验室里,教会了AI如何理解「真实世界的规则」。