对抗知识焦虑,从看懂这条开始
App 下载
先冲线的机器人,输给了后到的对手
视觉传感器|激光雷达|强化学习算法|自主导航|人形机器人|AI智能体|人工智能
对抗知识焦虑,从看懂这条开始
App 下载视觉传感器|激光雷达|强化学习算法|自主导航|人形机器人|AI智能体|人工智能
北京亦庄的半程马拉松赛道上,两台外形几乎一模一样的机器人先后冲过终点线——率先撞线的那台全程保持7米/秒的速度,把对手甩在身后足足两分钟,最终却没能拿到冠军。它的完赛时间被乘以了1.2的加权系数,原本48分19秒的净成绩,一下子变成了约57分钟,反超了它的自主导航对手最终用时50分26秒。这场看似戏剧性的结果,藏着人形机器人两大技术路线的正面较量,也藏着竞赛规则对技术方向的隐秘引导。
自主导航的机器人像是独自跑马拉松的选手,要自己看路、判断路况、规划补给点。它靠激光雷达、视觉传感器和惯性测量单元组成的“感官系统”,实时绘制赛道地图,用强化学习算法避开动态障碍——比如突然变道的人类跑者,或者被风吹到路中间的广告牌。每一次抬脚、每一次变向都由它自己决策,全程不能超过3次人工干预,否则就会被划入遥控组计算成绩。而遥控机器人更像是被远程操控的赛车,人类操作者通过动作捕捉设备实时下达指令,反应速度更快,却要面对通信延迟的风险,以及规则设置的加权系数——这是赛事对“自主智能”的倾斜,毕竟从实验室到真实场景,机器人的独立决策能力才是核心竞争力。
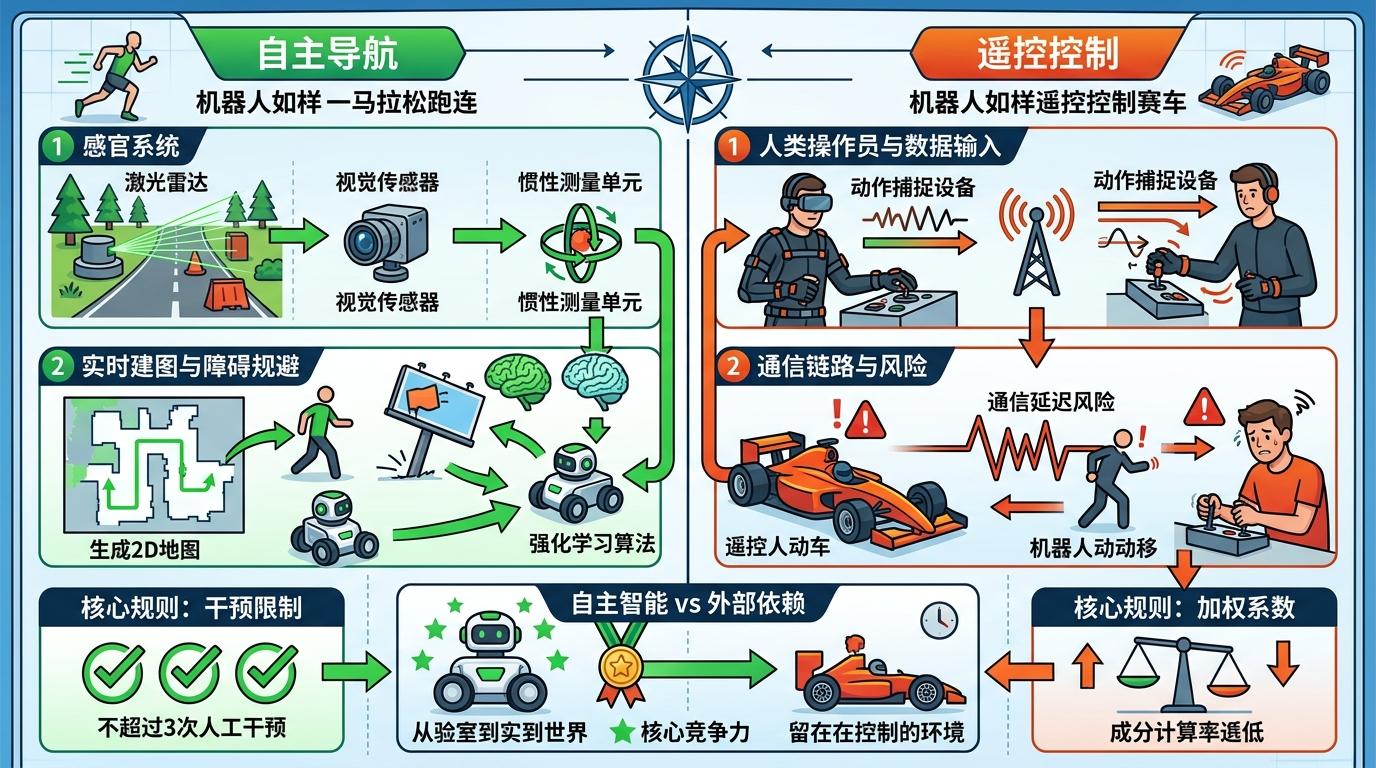
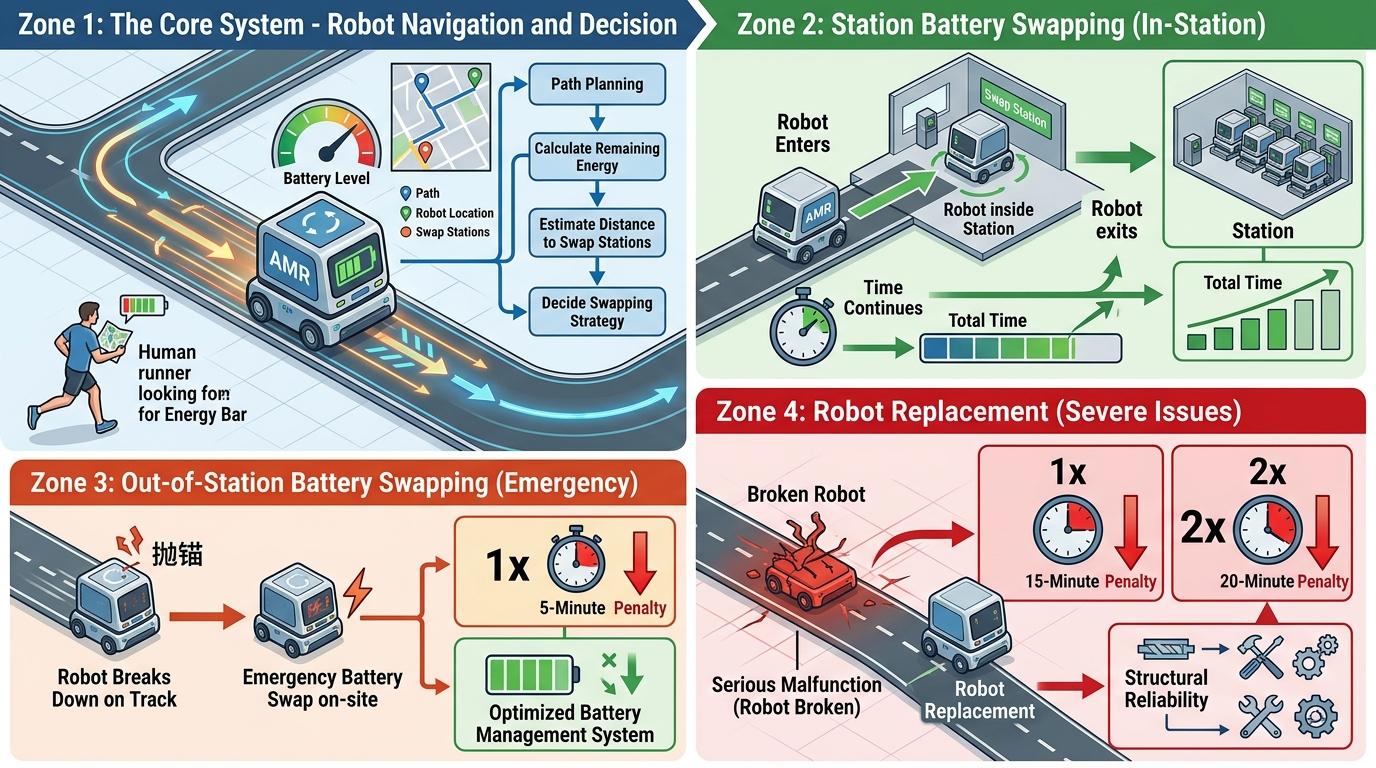
换电和罚时规则,则把技术较量延伸到了续航和可靠性层面。站内换电不罚时但耗时算入总用时,意味着自主导航机器人必须学会在规划路径时,精准计算剩余电量和换电站的距离,就像人类跑者要在体力耗尽前找到补给站。站外换电仅限紧急情况,第一次就罚5分钟,这倒逼研发团队优化电池管理系统,减少机器人在赛道上“抛锚”的可能。更换机器人最多2次,第一次罚15分钟,第二次20分钟,更是把机器人的结构可靠性推到了台前——毕竟没人愿意为频繁故障付出时间代价。
这场比赛的结果,其实是技术与规则互相塑造的缩影。加权系数不是对遥控技术的否定,而是在为自主导航的研发团队争取时间——毕竟目前的自主导航算法,在动态环境的响应速度上还追不上人类的实时判断。而自主导航机器人的夺冠,也印证了行业的共识:真正能走进工厂、医院和家庭的人形机器人,必须能在没有人类盯着的情况下,独立完成任务。未来的赛道上,两种技术路线或许不会非此即彼,而是走向融合——就像人类跑者有时需要教练的提醒,机器人也可能在复杂任务中,接受人类的有限干预,但最终的方向,一定是让机器人学会自己“跑”完人生的马拉松。
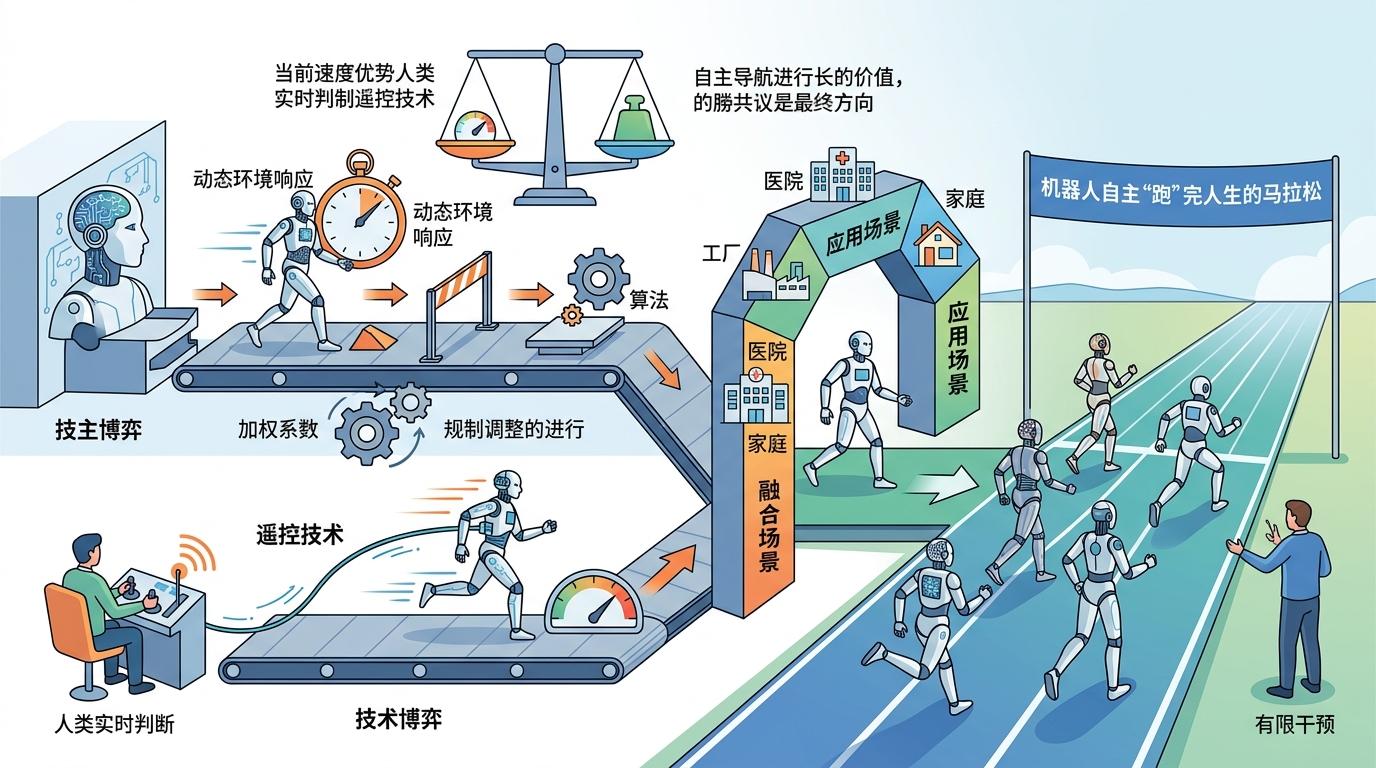
规则不是枷锁,而是技术成长的脚手架。当人形机器人不再需要靠人类“扶着”才能跑赢比赛,它们才真正具备了走进真实世界的底气。