对抗知识焦虑,从看懂这条开始
App 下载
扫地机器人终于能爬门槛钻床底了
障碍跨越能力|主动变形技术|底盘结构|扫地机器人|消费电子|前沿科技
对抗知识焦虑,从看懂这条开始
App 下载障碍跨越能力|主动变形技术|底盘结构|扫地机器人|消费电子|前沿科技
你家的扫地机器人大概率有张「残缺的清洁地图」——浴室门口的隔水条、卧室的推拉门滑轨、沙发和床的底部,这些地方永远是它碰都不碰的「禁区」。过去十年,我们看着厂商们把吸力从几千Pa卷到三万Pa,把避障传感器从红外换成AI双目,却始终没解决这个最原始的痛点:机器只能在平地上跑,稍微有点高度差就认怂。直到2026年AWE的石头展台,一台机器人对着4.5厘米的门槛加4.3厘米的台阶,抬起前轮、调整机身,像越野车一样平稳爬了过去。这不是炫技,是扫地机器人第一次真正跳出了「二维平面」的牢笼。为什么偏偏是底盘结构,成了打破僵局的关键?
扫地机器人的底盘进化,本质上是一场和「空间限制」的拉锯战。
第一代底盘是固定高度的「平板车」,越障能力只有2厘米,遇到稍微高点的门槛就只能绕路——就像给你一辆跑车,却只能在操场跑道上开。石头最早推出的底盘升降1.0,算是第一次给机器装了「增高垫」,能把底盘抬到4厘米,勉强能过大多数家庭的隔水条和滑轨,但本质还是「被动抬高」,遇到复杂地形依然没辙。
到了2.0时代,「无极动态升降」让底盘能跟着地面实时调整高度,拖布也会同步抬升,终于不会把湿拖布蹭到地毯上。但这依然是在「平面逻辑」里优化,机器还是只能贴着地面走,沙发底和床底这些低矮空间,要么钻不进去,要么进去了就瞎扫。
真正的转折点是底盘升降3.0的AI轮足系统——石头把整个底盘拆成了能独立动作的模块:驱动轮能抬升、万向轮能摆动、底盘能像人的关节一样伸缩。现在机器遇到障碍,不是硬冲也不是绕路,而是先通过RGB摄像头和结构光「看清楚」障碍高度,然后调整机身姿态:前轮抬起来探路,底盘跟着调整角度,像攀岩一样一步步爬过去。
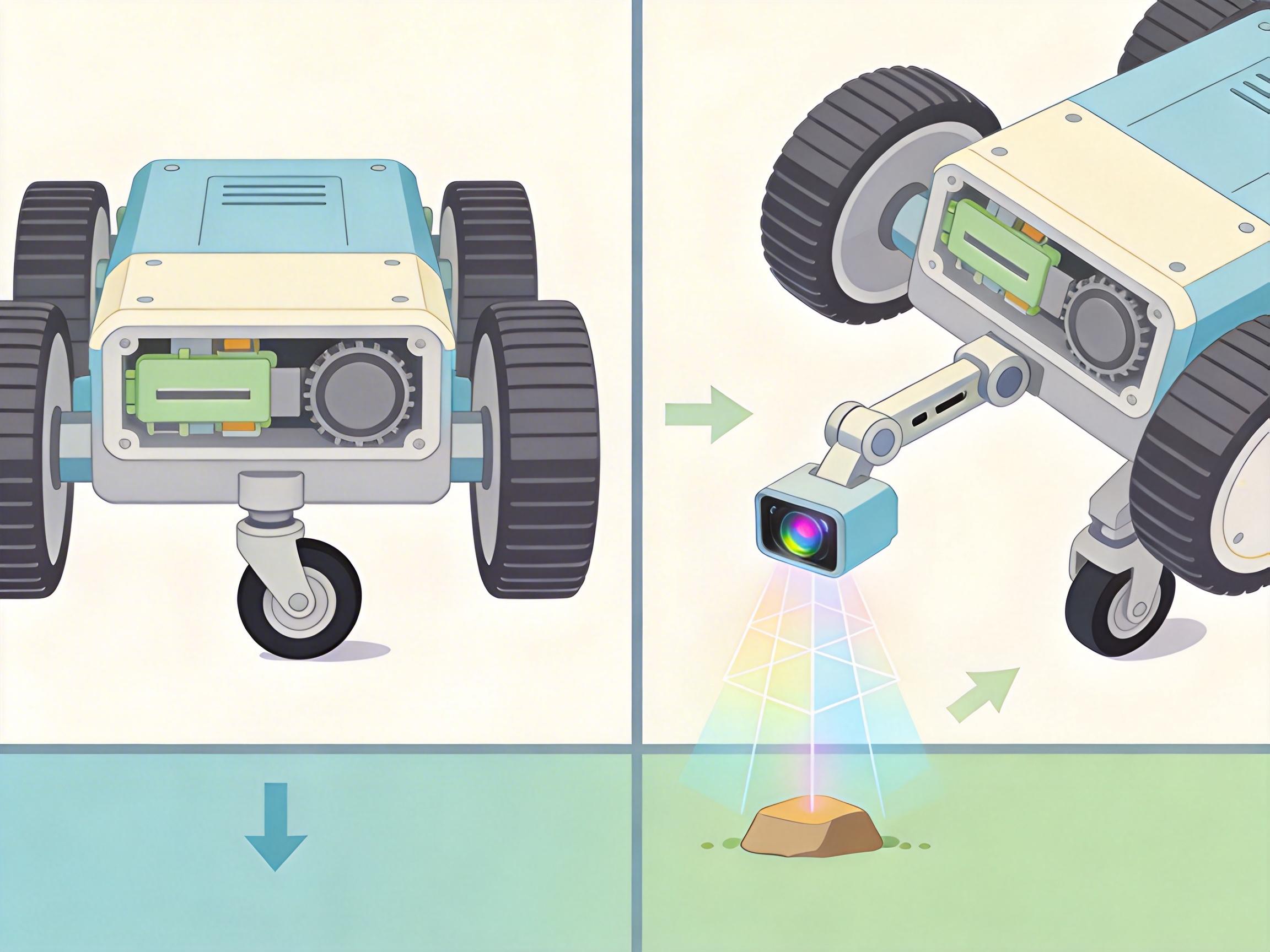
它不再是个只能在平地上滑行的工具,而是有了「肢体控制能力」。
行业里卡了十年的死结,是「越障能力」和「低矮空间通过性」的零和博弈:要想爬门槛,就得加复杂的升降结构,机身必然变高;要想钻床底,就得做薄机身,只能牺牲导航和越障能力。
过去的「超薄扫地机」,其实是砍了顶置LDS激光雷达才做薄的——就像为了钻进山洞,把眼睛蒙起来,进去了也是瞎转。石头G30S Pro换了个思路:把LDS雷达从顶部挪到了机身后方,还装了个升降机构。平时雷达升起来,保证360度导航精度;遇到低矮空间,雷达就收下去,机身高度能降到7.95厘米,刚好能钻进大多数沙发底和床底,而且靠110度的后视传感器依然能精准导航,不会瞎扫。
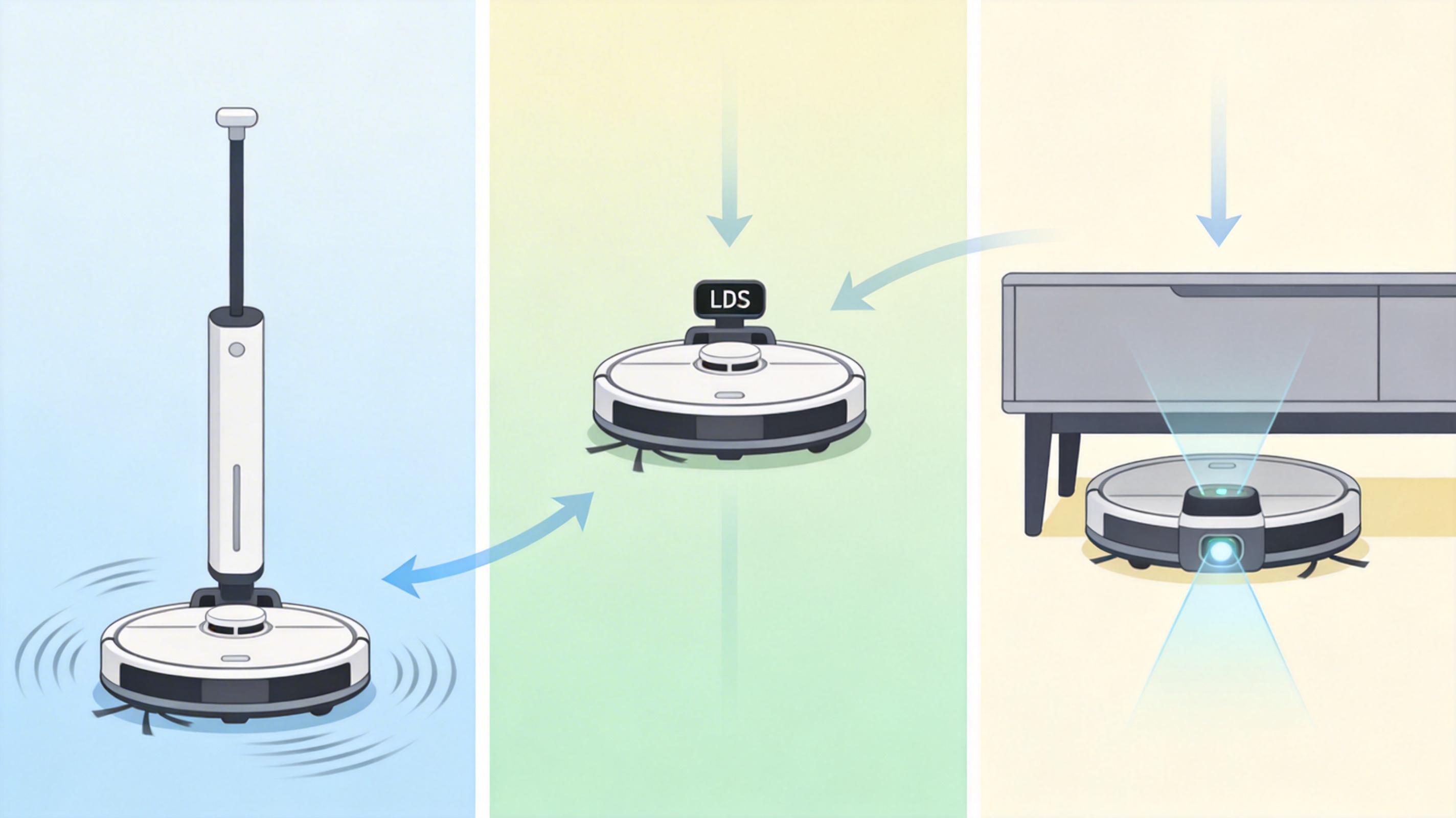
这相当于给机器装了个「可伸缩的眼睛」,既能站得高看得远,又能蹲下来钻缝隙。数据最能说明问题:它能爬过8.8厘米的双层障碍,相当于同时过一个门槛加一个台阶;又能钻进7.95厘米的低矮空间,把过去藏在家具底下的灰尘死角彻底扫干净。
我认为,这才是真正的「用户导向」设计——不是为了参数好看堆硬件,而是解决用户最痛的「两难选择」。
底盘的突破只是开始,真正让这台机器「活」起来的,是感知-决策-执行的完整闭环。
它内置的RRmind GPT大模型,能听懂你说的「把客厅撒了咖啡粉的地方扫干净」,而不是只会执行「清扫客厅」这种简单指令;它的传感器能识别280多种障碍物,看到电线会绕开,看到宠物粪便会绕开还会提醒你;甚至能根据地面污渍调整策略:看到干性的咖啡粉就开最大吸力,看到油性的酱料就用高温拖布反复擦,还会控制水量不把污渍蹭开。
现在的它,已经不是个只会按程序走的清洁工具了。它能「看见」环境,「理解」需求,「调整」动作——就像个会干活的家庭助手。
这也解释了为什么高端扫地机市场增速能到65%:用户已经不满足于「能扫地」,而是想要「能好好扫地」,想要机器能适应自己的家,而不是反过来让自己去适应机器的局限。
当我们谈论扫地机器人的进化时,很容易陷入参数的比拼:谁的吸力更大,谁的避障传感器更多。但石头G30S Pro的出现,给行业指了个新方向:真正的智能,是让机器适应真实的生活空间,而不是让生活去适应机器的参数。
从只能在平地上跑的「平板车」,到能爬门槛钻床底的「变形机器人」,扫地机器人的进化,本质上是一场「空间解放」——解放机器的运动边界,也解放用户的清洁焦虑。
机器懂空间,用户才自由。
未来的家庭机器人,或许不会是长得像人的人形机器,但一定是能像人一样,灵活穿梭在复杂的家的空间里,默默把该做的事做好的「隐形助手」。