对抗知识焦虑,从看懂这条开始
App 下载
机器人搬冰箱的背后,是百万小时的虚拟苦修
仓库搬运|人形机器人|高保真物理引擎|虚拟训练|波士顿动力|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载仓库搬运|人形机器人|高保真物理引擎|虚拟训练|波士顿动力|具身智能|人工智能
想象一下:一个1.5米高的金属“人”,在仓库里精准转身180度,稳稳蹲到22公斤的迷你冰箱前,用躯干和机械臂合力把冰箱抱起,再平稳送到你面前。这不是科幻电影的镜头,而是波士顿动力展示的真实场景。你可能会惊讶于它的灵巧,但更值得注意的是:这个搬冰箱的动作,是它在虚拟世界里“练”了数百万小时才学会的——相当于一个人不吃不睡练习114年。这背后藏着的,才是人形机器人真正的技术革命。
你可以把虚拟训练理解为机器人的“题海战术”,只不过这个“题海”是用代码搭建的虚拟世界。研究团队用高保真物理引擎模拟出重力、摩擦力、物体重量等所有真实世界的物理规则,然后让机器人在里面反复尝试搬冰箱:有时冰箱位置偏左,有时地面摩擦力突然变小,有时重心歪到一边——每一次失败都会转化成数据,让机器人的算法记住“这样做会摔倒”,然后调整动作策略。
为了让机器人能适应真实世界的不确定性,他们还用上了“领域随机化”技术:虚拟世界里的冰箱重量、地面材质甚至光线都会随机变化,就像让一个人在晴天、雨天、雪天里反复练习同一个动作。这样练出来的机器人,不会因为真实环境里一点小小的变化就“罢工”。

更聪明的是,团队把机器人的四肢当成四个独立的“小智能体”,让它们各自学习怎么发力,再通过共享的“大脑”协调动作——就像四个人抬箱子,不用谁指挥,也能默契地调整力度保持平衡。这种多智能体协作的方法,让机器人的动作流畅度提升了30%以上。
但虚拟世界再逼真,也和现实有差距——这就是机器人领域最难的“仿真到现实鸿沟”。比如虚拟里的关节摩擦力是精确的0.1,但真实机器人的关节可能因为磨损变成0.12,一点点误差就可能让练了百万小时的动作在现实中失败。
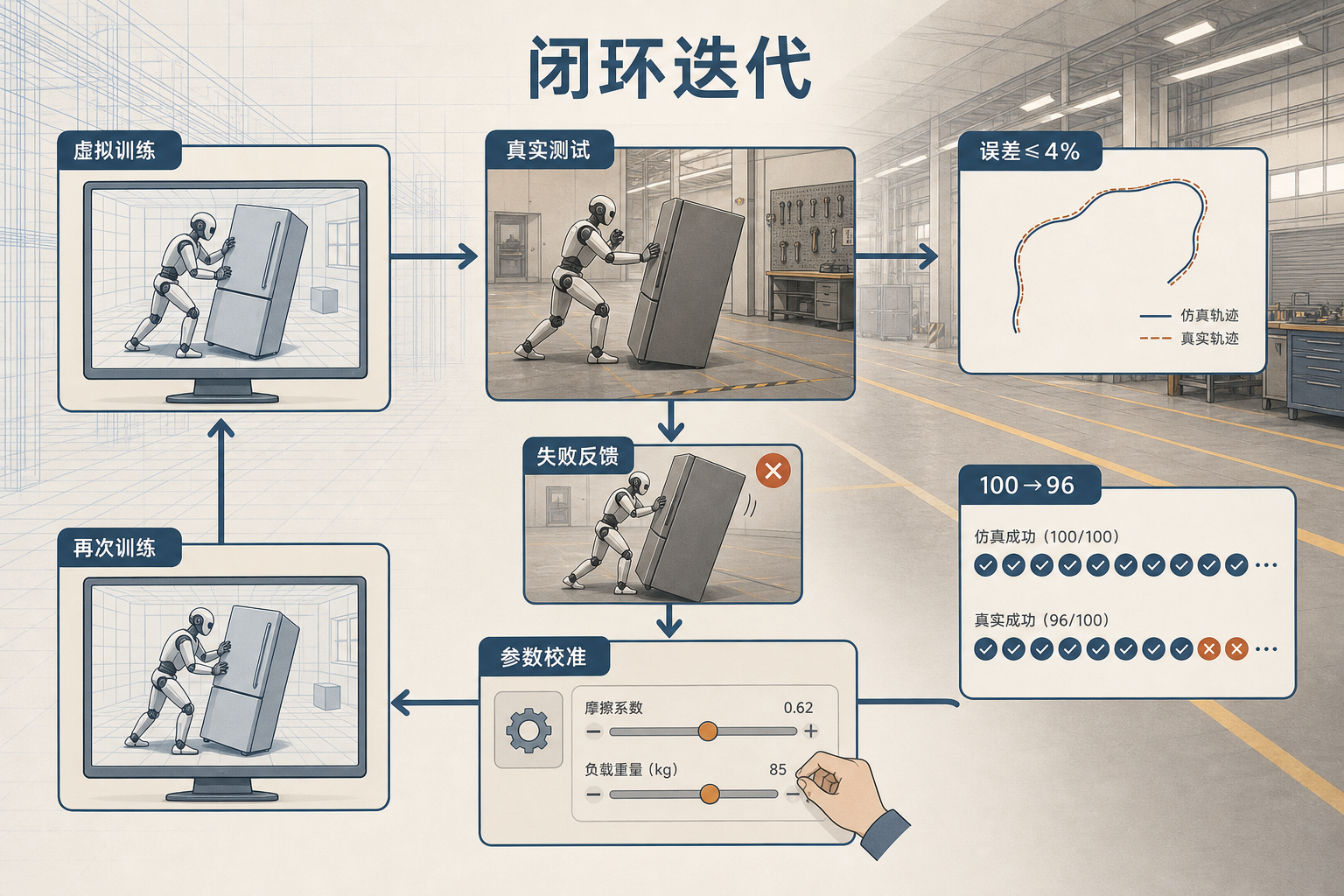
波士顿动力的解决办法是“闭环迭代”:先让机器人在虚拟世界练出初步技能,再放到真实环境里测试,把失败的数据反馈回虚拟世界,调整物理参数后再练。就像厨师试菜:尝一口觉得咸了,就回去调整配方再试。他们把这个过程叫做“建造-破坏-修复”,通过反复循环,虚拟和现实的差距被缩小到了4%以内——也就是说,虚拟里成功100次的动作,现实里能成功96次。
硬件设计也在帮这个忙:机器人用的是无缆线关节,能像人类肩膀一样无限旋转;全身布满360度视觉和触觉传感器,能实时感知冰箱的重量变化和地面的摩擦力;模块化的零件设计,让工程师能快速更换磨损的关节,不用把整个机器人拆开。这些细节,让虚拟世界里练出来的技能,能精准地复制到真实机器人身上。
当然,这场技术革命远没到终点。首先是成本:一台这样的机器人造价超过百万美元,相当于买两辆顶级跑车,中小企业根本用不起。其次是安全:如果机器人在搬运时突然失控,45公斤的最大负载足以把人撞伤,目前的安全系统只能在事故发生后紧急停止,还做不到提前预判。
最核心的是“泛化能力”:现在的机器人能搬冰箱,但换个形状奇怪的箱子,或者让它一边搬东西一边开门,它可能就手足无措了。它的百万小时训练都是针对特定任务的,就像一个只会做一道菜的厨师,换个菜谱就不知道怎么办。要让机器人真正像人一样灵活,还得让它学会“举一反三”——这可能需要另一个百万小时的训练,甚至是全新的算法。
当这个金属“人”稳稳把冰箱放在你面前时,它展示的不只是力量,更是AI技术的新方向:不再是坐在电脑里聊天的程序,而是能走进真实世界,用身体完成任务的“智能体”。
未来的工厂里,可能会有一群这样的机器人,搬重物、拧螺丝、组装零件,而人类只需要负责设计和指挥;家里的机器人,能帮老人把重物搬到楼上,能帮你把快递搬进家门。但在那之前,我们还得跨过成本、安全和泛化能力的坎。
虚拟苦修的终点,是人机共生的起点。