
11 天前
11 天前
2026年的机器人赛道里,出现了一件反常识的事:一家成立仅两年多、只做机器人“手”的公司,估值竟超过了头部整机厂商——200亿的估值,比宇树、智元这些人形机器人玩家的身价还高。
这不是资本的盲目狂欢。要知道,当前多数人形机器人还停留在“能动”的阶段,离“能用”隔着一道关键门槛:能不能像人手一样灵活抓取、操作物体。而这家公司,是全球唯一能月产千台高自由度灵巧手的企业——所谓高自由度灵巧手,就是能模拟人手关节活动,完成拧螺丝、拿杯子这类精细动作的机器人末端部件。它的崛起,其实是机器人产业从“拼整机”转向“拼核心”的信号。
高自由度灵巧手的难,藏在每一个毫米级的细节里。人手有27块骨头、30多个关节,要复刻这份灵活,需要微型电机、精密减速器、力觉传感器等一系列核心部件,任何一个环节依赖进口,都会被卡住成本和产能的脖子。
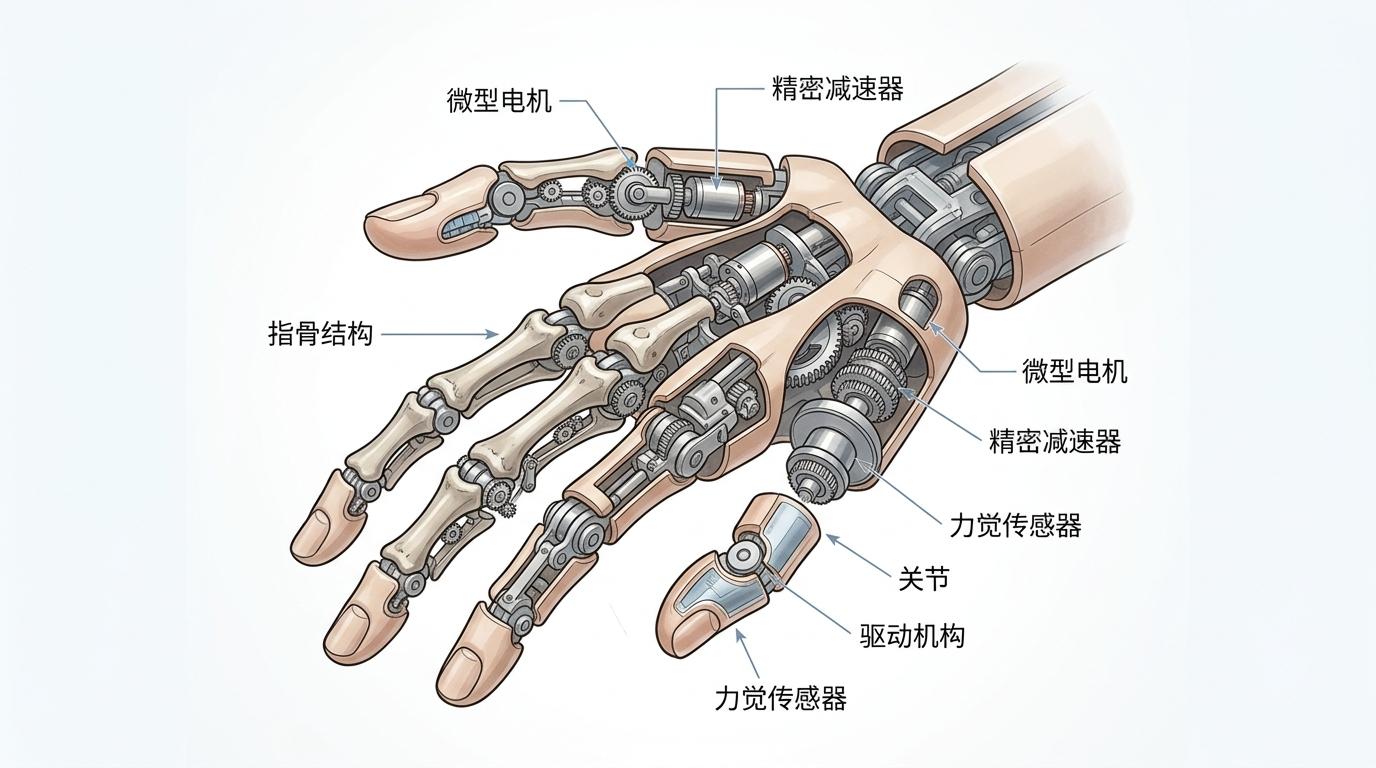
这家企业的破局之道是全栈自研:从最小的伺服电机到控制算法,全部自己设计生产。你可以把这个过程想象成自己攒一台电脑——不是买现成的整机,而是从CPU、主板开始,每一个零件都量身定制,不仅能把成本压下来,还能让各个部件的配合严丝合缝。比如他们的轻量级灵巧手,重量只有370克,却能实现12个关节的独立控制,售价仅为海外同类产品的1/10。
更关键的是,自研打通了硬件和软件的链路。传统灵巧手的控制算法往往是“黑箱”,企业只能在别人的框架里做调整;而全栈自研让他们能根据硬件特性优化算法,比如通过调整电机的响应速度,让抓取易碎物品时的力度控制精度提升30%。这种从底层开始的协同,是买零件组装的企业无法复制的。
如果说全栈自研是给机器人“手”装上了灵活的骨架,那数据驱动就是给它注入了会学习的大脑。
过去,机器人的操作技能大多在模拟环境里训练,就像在游戏里练开车,到了真实世界还是会翻车——模拟场景里的杯子永远是标准形状,而现实中的杯子可能沾了水、放歪了位置。这家企业的做法是直接在真实世界采集数据:他们搭建了一套多模态采集系统,让人类操作员用灵巧手完成拧螺丝、插USB、拿鸡蛋等动作,同时记录下每一个关节的角度、力度、速度,还有视觉、触觉的反馈。
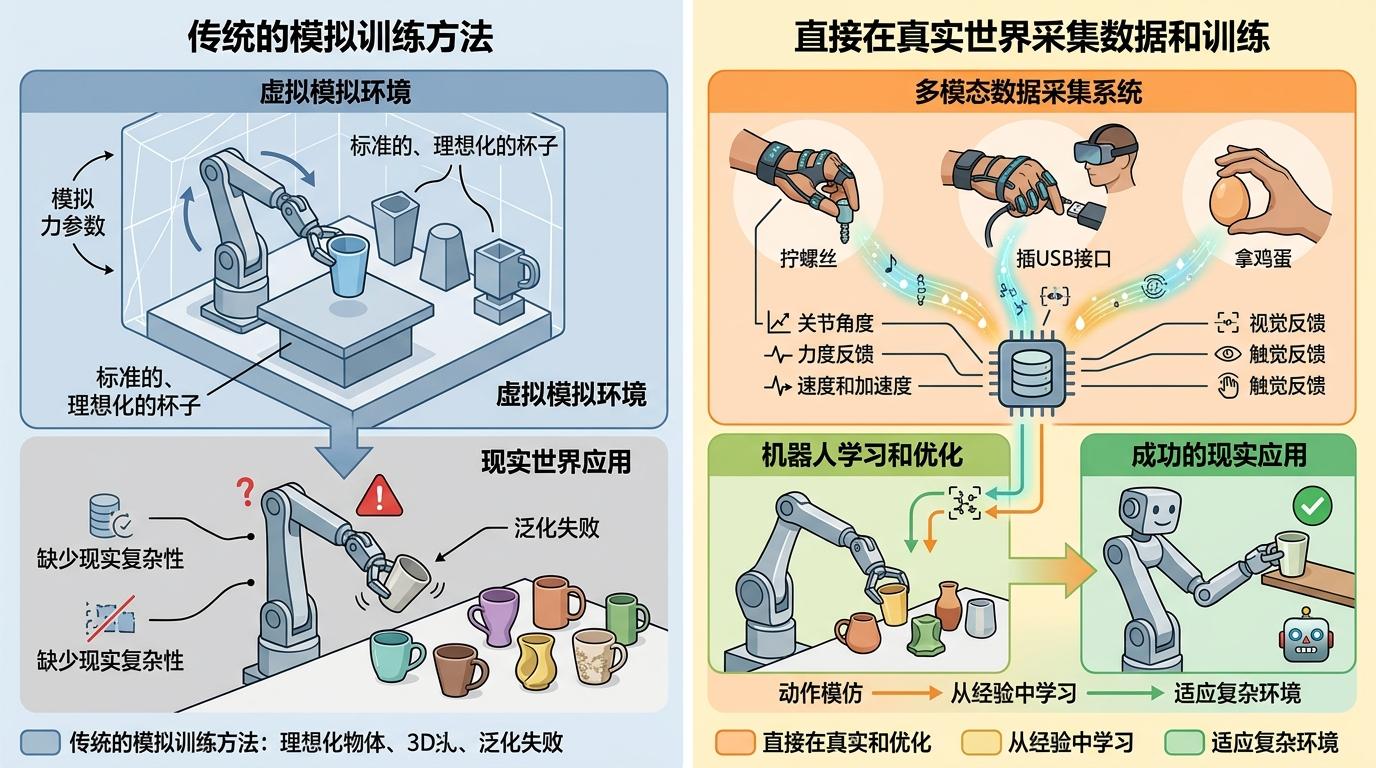
这些真实数据的价值,在于让机器人学会“变通”。比如训练抓取鸡蛋时,系统会记录下不同力度下蛋壳的形变数据,当遇到表面有污渍的鸡蛋,算法会自动调整抓取的角度和力度,而不是像在模拟环境里那样用固定程序操作。他们的数据集里已经积累了超过100万条人类手部操作轨迹,基于这些数据训练的算法,让灵巧手在复杂场景下的操作成功率提升了40%以上。
当然,这背后也有挑战:真实数据的采集成本高,而且要避免“仿真到现实”的鸿沟,需要不断在数据和硬件之间迭代优化。但一旦形成数据壁垒,后来者就很难追上——就像一个练了10年的老工匠,新手再聪明也需要时间积累经验。
在机器人产业的早期,大家都盯着整机——谁先做出能走路的人形机器人,谁就吸引最多目光。但现在资本的转向,暴露了一个更本质的逻辑:当整机的技术路线还在快速迭代时,核心零部件反而成了更确定的“刚需”。
就像淘金热里,卖铲子的总能赚到钱——不管最后哪家整机厂商跑出来,都需要灵巧手这个核心部件。而且灵巧手的技术壁垒更高:全球能稳定量产高自由度灵巧手的企业不超过5家,而人形机器人整机厂商已经有几十家。这种供需的不平衡,让零部件企业的话语权越来越大。
但这并不意味着整机厂商没有机会。未来的竞争,会是“核心部件+整机协同”的竞争:谁能把灵巧手和机器人的身体、大脑更好地整合,谁就能做出真正“能用”的机器人。比如特斯拉的Optimus,虽然灵巧手的研发几经波折,但一旦实现整机协同,就能在工厂里完成精密的装配任务。而对于零部件企业来说,最大的挑战则是如何把技术优势转化为更广泛的场景应用——现在灵巧手大多用在科研和高端工业场景,要走进普通工厂、家庭,还需要进一步降本和提升可靠性。
当我们为200亿估值的“最贵的手”惊讶时,其实看到的是机器人产业的一个转折点:从追求“看起来像人”,转向追求“能像人一样干活”。
全栈自研打破了海外技术的垄断,数据驱动让机器人学会了真实世界的智慧,这两者结合起来,就成了企业最坚固的护城河。未来的机器人,不会是一个个孤立的整机,而是由无数个像灵巧手这样的核心部件,通过数据和算法连接起来的智能系统。
自研打底,数据喂大,这才是机器人产业的硬逻辑。 而这只“最贵的手”,不过是这个逻辑的第一个注脚。
点击充电,成为大圆镜下一个视频选题!