对抗知识焦虑,从看懂这条开始
App 下载
机器人从工厂走进家庭,具身智能是关键钥匙
物理交互|环境感知|人形机器人|四足机器人|家庭服务机器人|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载物理交互|环境感知|人形机器人|四足机器人|家庭服务机器人|具身智能|人工智能
2026年上海AWE展的某个下午,一个身高174cm的机器人正稳稳端着玻璃杯,给围观的观众倒出半杯红酒——动作稳得像个有十年经验的餐厅侍者。而在隔壁展位,一台四足机器人正踩着积水爬上楼梯,身后的斜坡、水池模拟着建筑工地的泥泞路况。这不是科幻电影的片场,是具身智能机器人的集体秀。所谓具身智能,就是让AI跳出屏幕,钻进物理实体(比如机器人),通过身体的眼睛、皮肤、关节去感知环境、完成任务,而不是只会在代码里运算。当这些机器人不再只会跳舞耍帅,而是能拧螺丝、叠毛巾、陪老人聊天,一个问题浮了上来:它们是怎么从工厂的铁笼子里,走进我们的客厅的?
你可以把传统工业机器人想象成一个只会背台词的演员——只能在固定的流水线“舞台”上,重复预设好的动作,换个场景就彻底失灵。而具身智能机器人,更像一个能随机应变的即兴表演者,核心在于三大技术支柱的联动。
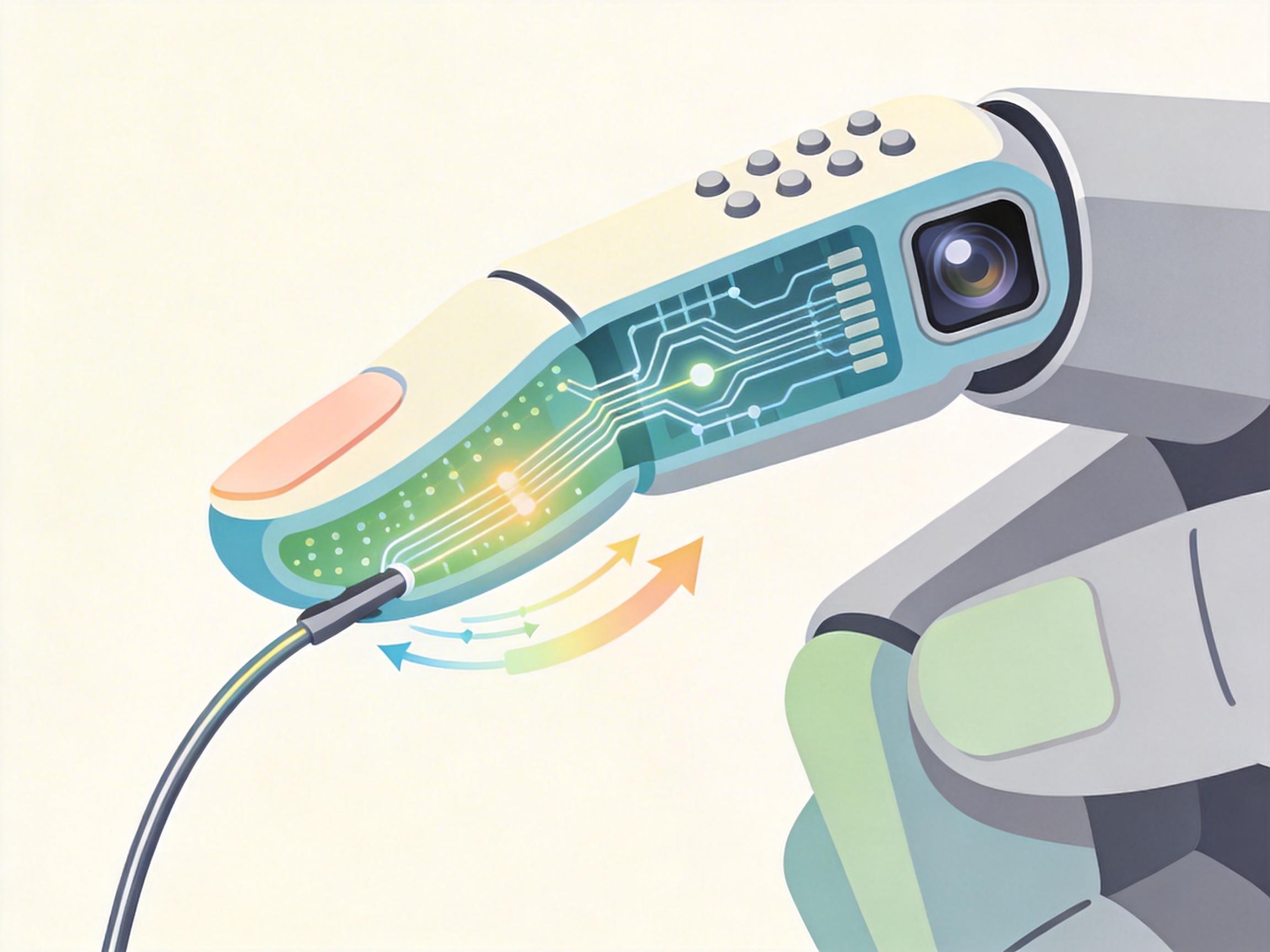
首先是**多模态感知融合**——就像人同时用眼睛看、用手摸、用耳朵听来判断事物,机器人也得把视觉摄像头、触觉传感器、力觉反馈的数据揉到一起。比如它石智航的机器人能捏起0.5mm的柔性线束,靠的就是指尖的触觉传感器实时“汇报”力度,配合视觉确认位置,才不会把细线捏断。
其次是通用具身大模型——这是机器人的“大脑操作系统”。以前的机器人学一个动作要写几百行代码,现在大模型能把人类的语言指令(比如“把桌上的毛巾叠好”)翻译成机器人能懂的动作序列,还能从错误里学习:第一次叠歪了,第二次就会调整抓取的位置。它石智航的AWE3.0模型,就是靠百万级的操作数据训练,才实现了亚毫米级的精准操作。
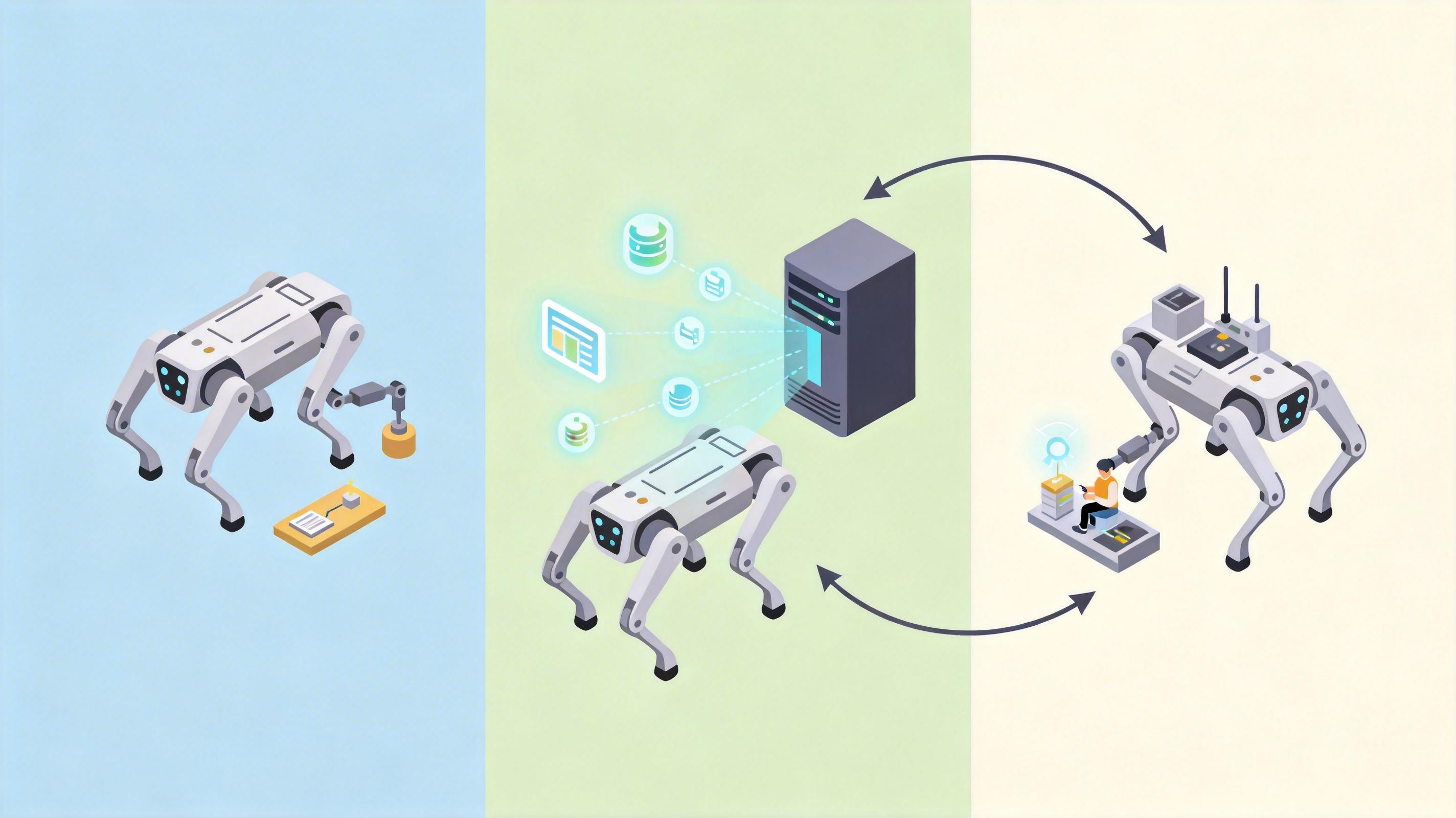
最后是**数据飞轮闭环**——机器人在真实场景里每做一次任务,都会把感知、动作、结果的数据传回后台,用来优化模型。做得越多,模型越聪明,机器人能搞定的场景就越多,反过来又能收集更多数据。宇树科技的四足机器人从只能爬楼梯,到能在工地巡检投送物资,就是靠一次次在复杂环境里“试错”练出来的。
具身智能的终极目标,是让机器人成为“全场景选手”——既能在工厂拧螺丝,也能在客厅倒垃圾。现在的行业,正处在从工业端向消费端渗透的关键节点。
工业端已经先跑出了成熟模式:它石智航的机器人能替代工人完成柔性线束装配,效率比人工高3倍,还能24小时不休息;魔法原子的四足机器人能在地震后的废墟里巡检,不用冒着生命危险派人类进去。这些场景的核心是“替代”——做人类不想做、做不了、做不好的事,企业愿意为效率和安全买单,技术落地的阻力很小。
真正的挑战在消费端。维他动力的Vbot机器狗预售卖出6540台,看起来火爆,但背后是团队把价格压到了万元级,还得解决“为什么需要它”的问题:是陪孩子玩,还是帮老人拿药?目前的消费级机器人,大多还停留在“玩具”和“工具”之间的模糊地带——能跳舞能跟随,但还做不好一顿完整的饭,续航也撑不过一整天。
更关键的是成本和信任。一台能做家务的人形机器人,现在售价还在几十万元,普通家庭根本买不起;就算价格降下来,你敢让一个1米7的金属家伙在你家厨房里挥锅铲吗?安全、隐私、伦理的坎儿,比技术难题更难跨。
AWE展的机器人展位挤得水泄不通,2025年具身智能企业融资超300起,融资金额同比翻了3倍——资本的热情像潮水一样涌进来,但热闹背后,有两个容易被忽略的冷事实。
第一个是技术的“伪突破”陷阱。很多机器人在展会上能完美完成叠毛巾、串糖葫芦,但那是在精心布置的“理想场景”里:毛巾永远铺在平整的桌上,糖葫芦的竹签永远插在固定位置。一旦放到真实的家里,毛巾可能掉在沙发缝里,竹签可能滚到地上,机器人大概率会“罢工”。目前的具身智能,还没到能应对所有突发状况的地步。
第二个是产业链的“卡脖子”隐忧。虽然国内企业在机器人整机和算法上追得很快,但核心的关节电机、高精度传感器,还是依赖进口。一台人形机器人的成本,70%都花在这些核心部件上。如果上游供应链被卡,再热闹的展会,也只是空中楼阁。
我认为,现在的具身智能,有点像2016年的共享单车——资本催熟了市场,但真正能留下来的,一定是那些能解决真实需求、掌握核心技术的企业,而不是只会在展会上跳舞的“网红”。
当魔法原子的机器人在春晚捞面,当维他动力的机器狗走进普通家庭,我们看到的不只是技术的进步,更是人与机器关系的重构——机器人不再是冰冷的工具,而是能和我们共处的“伙伴”。
但我们也得清醒:具身智能的故事,才刚刚写了开头。它不会突然某天就把所有家务都包了,也不会马上替代所有工人,而是像温水煮青蛙一样,慢慢渗透进我们的生活:先从帮你取快递开始,再到帮你叠衣服,最后可能真的能给你做一顿热饭。
智能的终极形态,是让机器适应人,而不是人适应机器。 未来的机器人长什么样?不一定是像人的样子,但一定是懂你的样子。