对抗知识焦虑,从看懂这条开始
App 下载
智能驾驶卷到尽头,要靠基座模型换赛道
供应商成本|用户黏性|城市NOA|L2级智驾|基座模型|自动驾驶|人工智能
对抗知识焦虑,从看懂这条开始
App 下载供应商成本|用户黏性|城市NOA|L2级智驾|基座模型|自动驾驶|人工智能
当你开着10万级别的车在城市里自动导航,以为智驾已经触达平民市场的天花板时,行业的焦虑正从座舱里溢出来。截至2026年3月,国内L2级智驾新车渗透率破60%,城市NOA装车量逼近200万辆,但用户黏性却卡在20%-30%——多数人只是偶尔用用,绝不会把方向盘彻底交给机器。更棘手的是,8万级车型的智驾下放,让上游供应商的成本红线被踩得稀烂,小模型迭代陷入改了东墙塌西墙的“跷跷板效应”。所有人都在问:智驾的下一个破局点到底在哪?
你可以把当前主流的智驾小模型想象成背题机——把某条路的红绿灯、路口形状、车流规律背得滚瓜烂熟,换个城市就彻底懵圈。这些模型参数量大多在1亿以下,靠卷积网络识别固定场景,遇到“小孩突然冲马路”“积水路段避溅行人”这类需要物理常识的场景,就像没学过交通规则的新手,完全没了预判能力。
中汽中心的数据显示,城市NOA渗透率已达8.5%,但用户愿意日常使用的不足三成。轻舟智航CEO于骞的话点破了本质:当前智驾创造的价值还没大到让用户依赖。比如如果智驾能把车险保费降一半,用户接受度会跳级,但现在连安全验证的闭环都没形成——小模型的不稳定,让保险公司不敢轻易松口。
更致命的是“跷跷板效应”:同一套系统早上在上海跑得顺,中午到苏州就出错;晴天表现完美,雨天就识别模糊。这不是算法优化能解决的问题,而是小模型的底层逻辑就没学会“理解”物理世界,只能靠死记硬背应付有限场景。
当小模型的路走到头,基座模型成了行业公认的分水岭。简单说,基座模型就是先让AI在海量多模态数据里“上通识课”——学遍全球的交规、驾驶习惯、物理规律,再去学具体的“开车技能”,而不是反过来先学某条路怎么开。
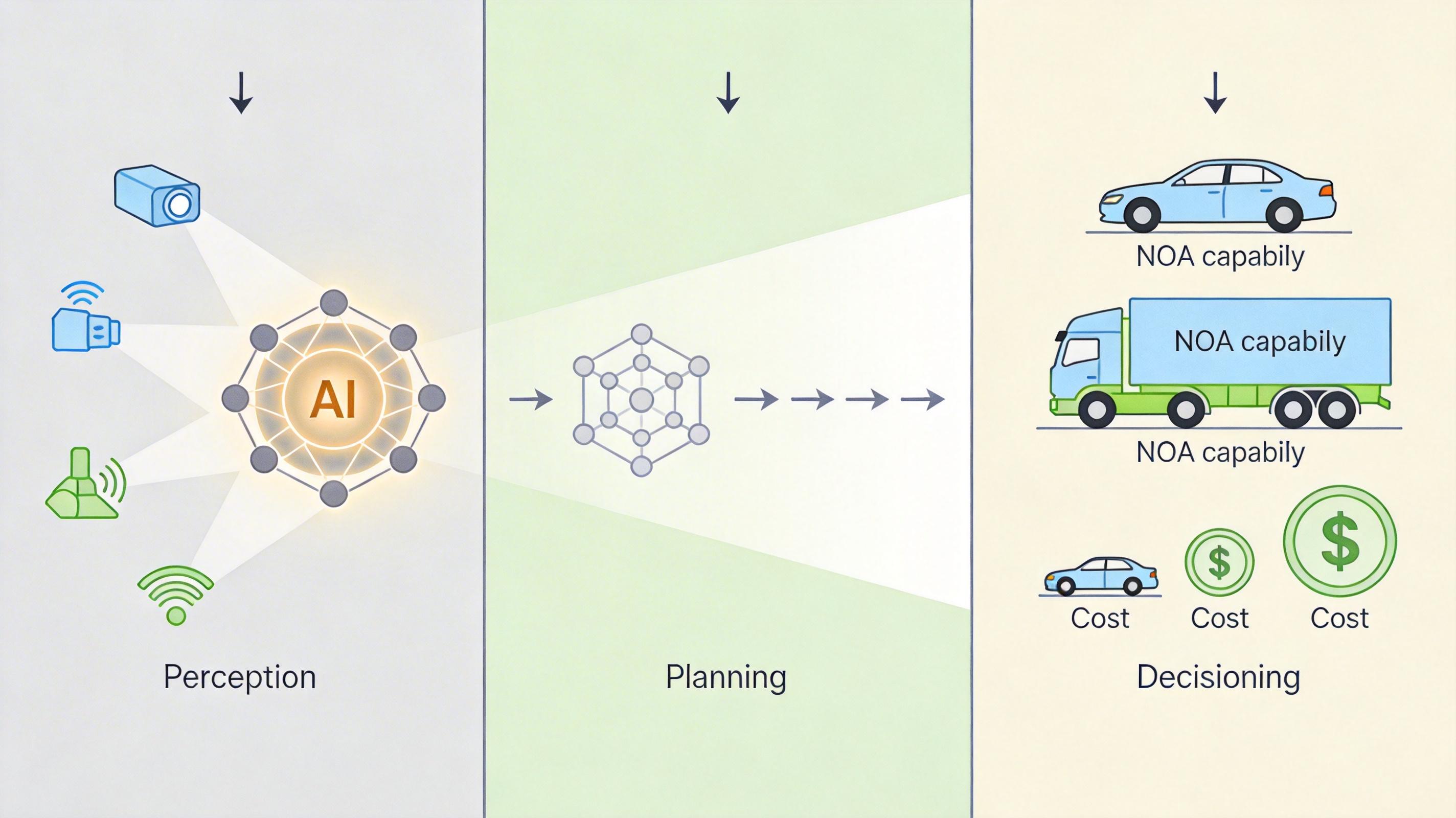
卓驭科技CEO沈劭劼把智驾技术分了三个阶段:第一阶段靠高精地图+规则决策,每开一个城市就得重新适配,成本高到离谱;第二阶段的中模型能做到“学一个省,会半个国”,但出海还是得大改;只有基座模型能实现“Zero-shot零数据迁移”——比如学会了开乘用车,不用重新训练就能直接开重卡;在中国练熟了,到欧洲换个交规就能上路。
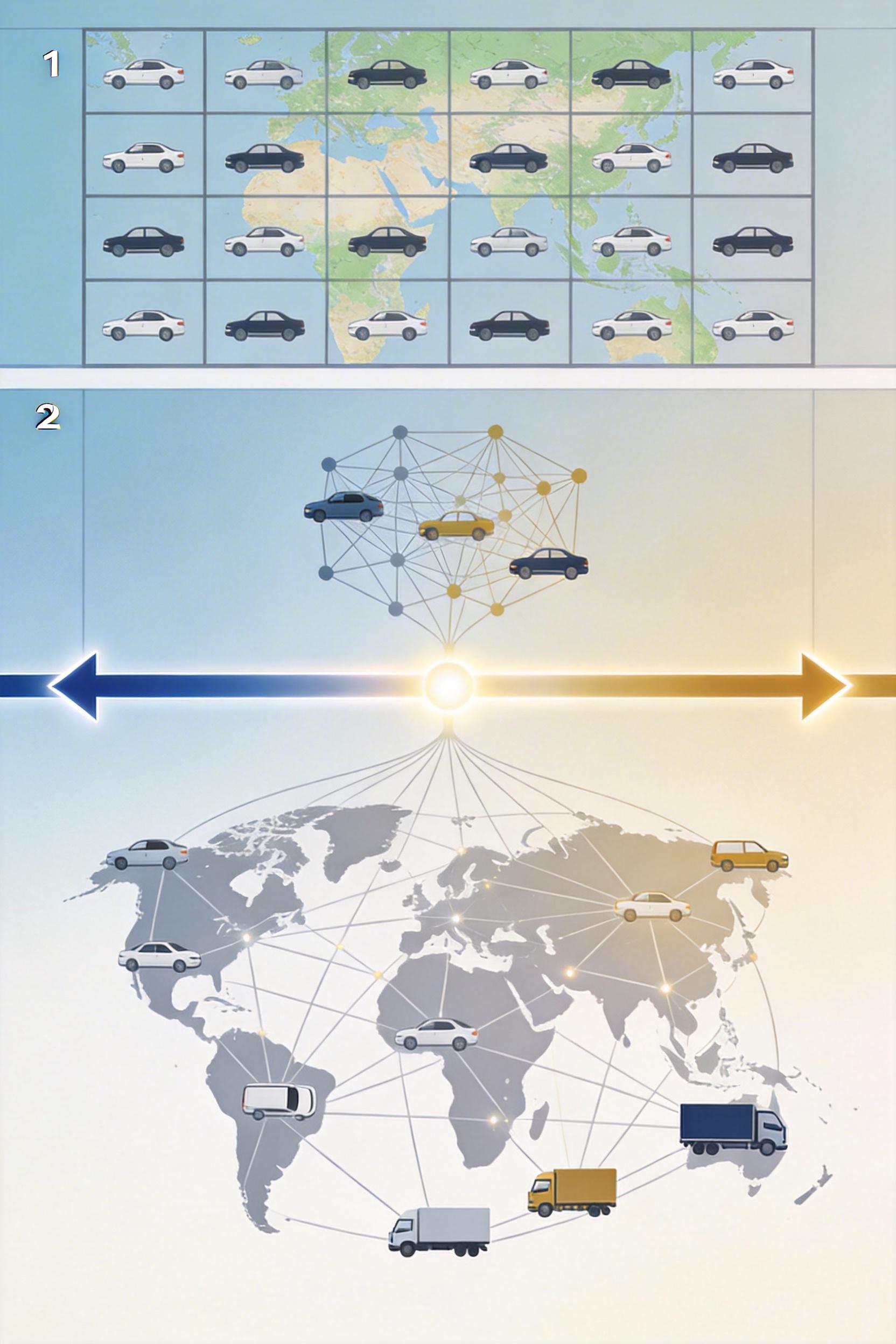
Waymo的EMMA模型就是典型:用多模态大语言模型把摄像头、雷达数据统一成“语言”理解,端到端训练感知、规划、决策全流程,能在10个美国城市“开箱即用”。国内卓驭科技靠这套逻辑,只用了两个月就把乘用车NOA能力迁移到了重卡上,成本比传统方法降低了70%。
但基座模型也不是万能药。它的训练需要海量数据和算力,实时推理的延迟问题还没完全解决,更关键的是,如何避免AI“脑补”出不符合物理规律的决策——比如让车做出违反力学原理的变道,这还需要世界模型和强化学习来补全。
当基座模型成为标配,智驾公司的身份正在悄悄改变——不再是卖“驾驶辅助功能”的供应商,而是做“移动物理AI”的科技公司。
这个转变的核心,是从“解决单一驾驶问题”转向“理解整个物理世界”。比如以前的智驾系统只需要识别红绿灯,现在的物理AI要能预判:红绿灯坏了怎么办?旁边的电动车会不会突然变道?甚至要理解“积水溅到行人不礼貌”这种社会常识。
特斯拉、Waymo已经完成了这个转身,国内大模型公司也开始跨界布局。但这个赛道的门槛极高:不仅要懂AI,还要懂汽车的物理结构、机械控制,甚至要懂不同国家的交通文化。尾部玩家会加速出局,头部公司则会靠数据和模型优势形成壁垒。
更重要的是,商业模式也在变。以前靠卖硬件、收一次性服务费,未来可能靠软件订阅、跨场景服务赚钱——比如一辆车的AI模型,既能当乘用车开,也能当物流车调度,甚至能帮园区做自动驾驶接驳。
当我们还在为10万级车有NOA而兴奋时,行业已经在谋划一场换道赛跑。智驾的终极形态,从来不是“帮人类开车”,而是成为能在物理世界自由移动的智能体——它能理解规则,能预判风险,甚至能懂人情世故。
智驾的未来,是AI学会“活”在物理世界里。 这场从背题机到通识教育的革命,不仅会改变汽车行业,更会重新定义AI和物理世界的交互方式。而现在,只是刚刚掀开序幕。