
1 个月前
1 个月前
80岁的老奶奶每天要扶着140斤的偏瘫孙子在山路上走半小时——这是中国8500万残障人士家庭的日常缩影。当康复医师缺口大到每25万人才能分到一位时,机器人成了这群人最后的希望。但你或许想不到,现在的康复机器人不仅能“读”懂人的意念,还能像衣服一样穿在身上,让偏瘫患者重新迈开步子。这背后,是人机交互与柔性技术的双重突破,而它改变的不只是康复方式,更是千万家庭的命运。为什么康复机器人能做到这些?我们得从它如何“读懂人心”说起。
康复机器人和工业机器人最大的区别,是它要和人“共生”——你想往前走,它不能往后拽;你想抬手,它得精准托举。这首先要解决的,是如何准确捕捉人的运动意图。
最直接的方式是读取肌肉的电信号——肌电控制技术,就像给机器人装了个“肌肉传感器”。当你想动手指,肌肉收缩产生的微弱电信号会被传感器捕捉,算法快速解码成动作指令,让假肢或助力器同步动作。但早期的传感器麻烦得很:必须精准贴在特定肌肉位置,每次穿戴都要反复调整,出汗松动就彻底失效。
中科院沈阳自动化所的团队解决了这个痛点:他们开发的算法能自动校准传感器位置偏差,哪怕电极脱落,也能通过剩余信号补全动作指令。就像你手机断了一根天线,还能靠其他天线维持信号——这让假肢终于能像戴手套一样随意穿脱,不用再对着肌肉位置反复比对。
对于完全瘫痪的患者,还有脑机接口技术——直接读取大脑的电信号。巴西世界杯上,一位截瘫患者靠意念控制外骨骼开出了点球;实验室里,志愿者能靠想象“石头剪刀布”,让机械臂完成对应动作。虽然目前脑机接口的识别精度还不够高,一分钟只能输入两个字符,但它给了连肌肉都无法控制的人,重新和世界互动的可能。
解决了“读懂人心”的问题,下一个难关是“怎么出力”。传统的刚性康复机器人像一副金属盔甲,笨重不说,还会限制人的自然动作——关节活动稍微偏离预设轨迹,就会产生硌人的摩擦力,甚至可能拉伤肌肉。

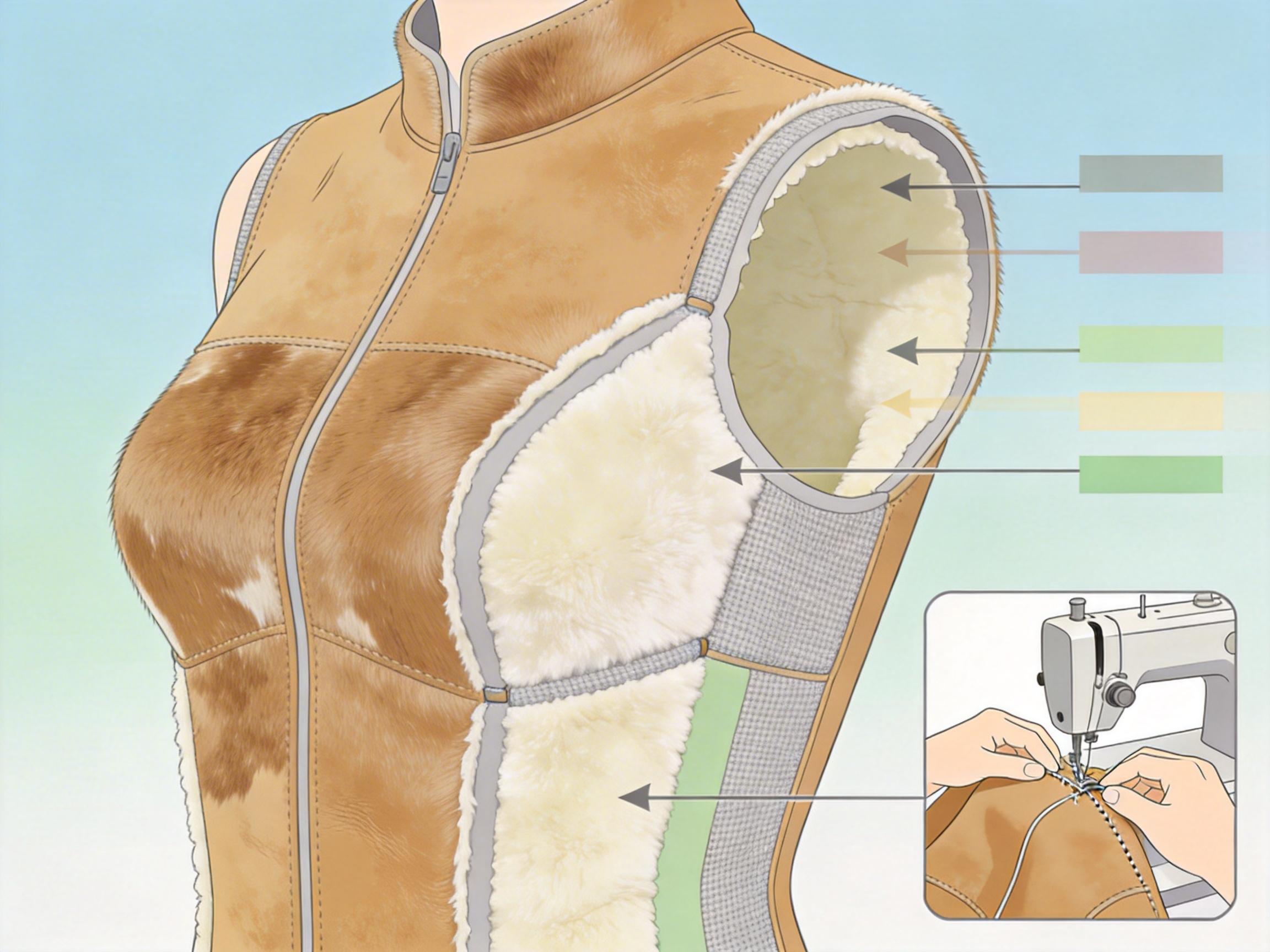
于是柔性助力系统出现了——它不是套在身上的机械架,而是像一件贴身的衣服。中科院的团队用牛皮做外层耐磨,羊皮做内层贴肤,接头处用透气织布,学生们甚至学会了用缝纫机缝制原型。这种“衣服”能完全贴合人体曲线,走路时不会卡关节,坐下时也不会硌腰。
但光软还不够,它得会“聪明地出力”。人类学走路要花一年时间,机器人得把这个过程压缩成几天。团队用了学习控制算法:第一次辅助时,机器人的助力曲线歪歪扭扭,和人的动作完全不同步;但每走一次,算法就会记住肌肉的发力规律,迭代调整助力时机和力度。几十次之后,机器人的动作就能和人完美合拍——你感觉不到它在用力,却能明显觉得腿变轻了:原来只能走1公里的人,现在能走3公里。
哈佛Wyss研究所的软外骨骼更轻,只有3.5公斤,能辅助踝、膝、髋三个关节。临床试验显示,它能把步行时的能量消耗降低15%,相当于给腿装了个“节能马达”。
现在的康复机器人已经能走进临床:ReWalk的软体外骨骼通过了FDA认证,能帮中风患者提升步行速度;韩国KIMM的“织物肌肉”助力服,能让肌无力患者的肩关节活动范围提升57%。但它离真正普及,还有三道坎要跨。
第一道是成本。一台刚性外骨骼要20万美元,就算是柔性系统,价格也让普通家庭望而却步。第二是传感器的稳定性——虽然算法能补偿信号偏差,但在出汗、运动等复杂场景下,还是可能出现识别失误。第三是标准化问题:不同患者的肌肉力量、关节活动度千差万别,机器人需要更精准的个性化调整,而这依赖大量临床数据的积累。
更重要的是,康复机器人不是要替代康复师,而是要成为他们的“延长手”。现在的研究开始强调“治疗师-机器人闭环控制”——治疗师能实时调整机器人的助力力度,把自己的康复经验融入机器的动作里,避免患者因为重复机械的训练而“习惯化”,影响神经恢复的效果。
当那位山村里的老奶奶不用再扶着孙子走半小时山路,当偏瘫的年轻人能自己拿起水杯,康复机器人的意义就超越了技术本身——它给的不是一台机器,而是重新掌控生活的尊严。
未来的康复机器人会更轻、更聪明:它可能是一件能洗的T恤,能实时监测肌肉状态;也可能是一个能放在口袋里的小装置,随时随地帮你拉伸僵硬的关节。但无论技术怎么变,它的核心始终是“人”——让机器适应人,而不是让人适应机器。
科技的温度,从来都在人的需求里。
点击充电,成为大圆镜下一个视频选题!