对抗知识焦虑,从看懂这条开始
App 下载
机器人终于不用走一步停三下做家务了
社交平台视频|移动操作一体化|家务演示|人形机器人|Helix 02系统|AI智能体|人工智能
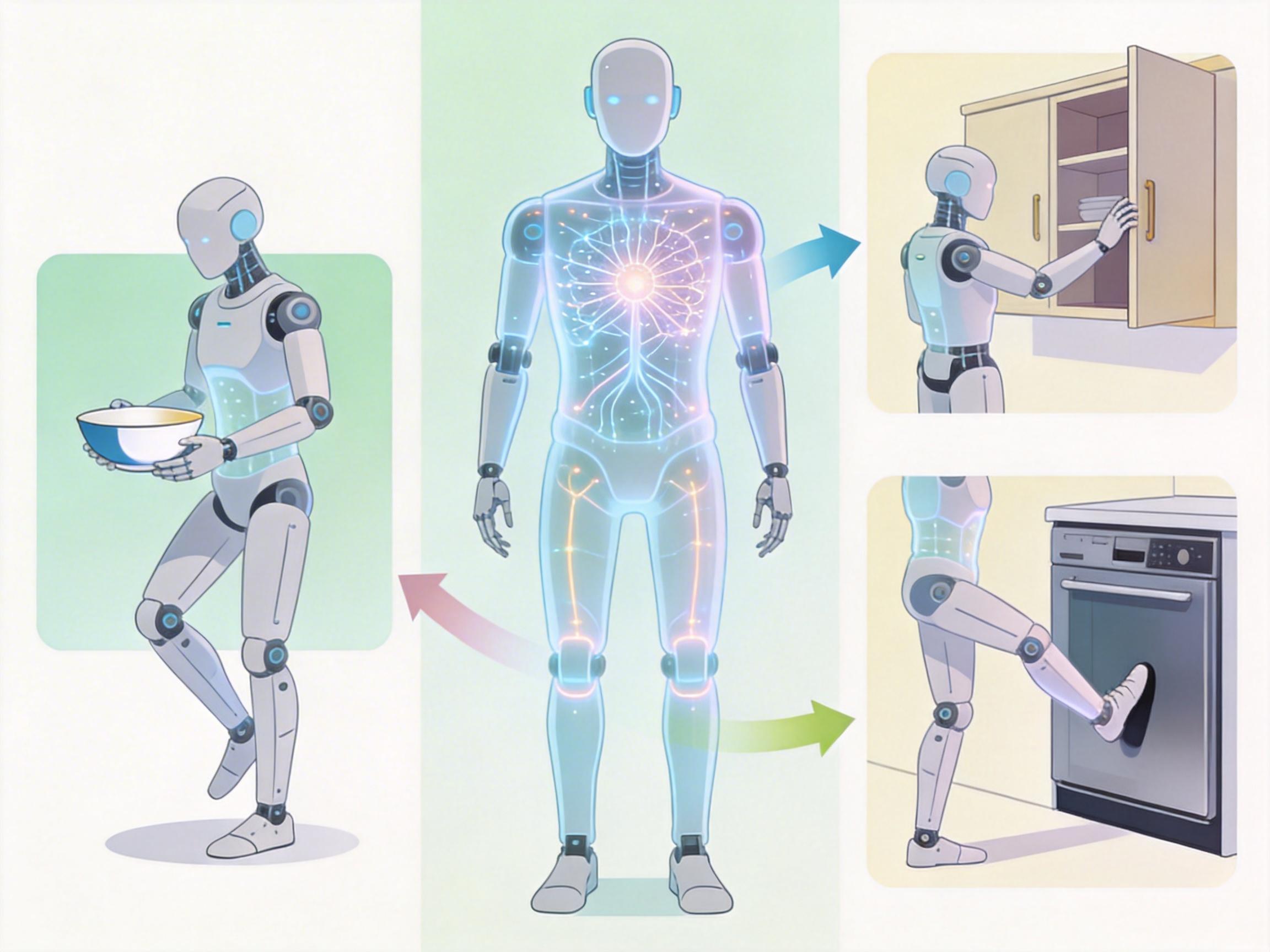
想象一下:你下班回家瘫在沙发上,客厅里的人形机器人正自己忙活——它边走路边把散落的玩具丢进收纳箱,擦茶几时没停下脚步,侧身蹭过沙发还顺手拍松了歪掉的抱枕,最后拿起遥控器关掉了亮着的电视。全程没有你的指令,没有遥控,一镜到底。这不是科幻片,是2026年3月一段在社交平台刷屏的机器人演示。但最值得注意的不是它做了这些家务,而是它做这些事的方式:没有走三步停五次的卡顿,动作流畅得像个熟练的钟点工。这背后是一套叫Helix 02的AI系统,它解决了困扰机器人学界几十年的难题——移动与操作的统一控制。
从走停做到边走边做的突破
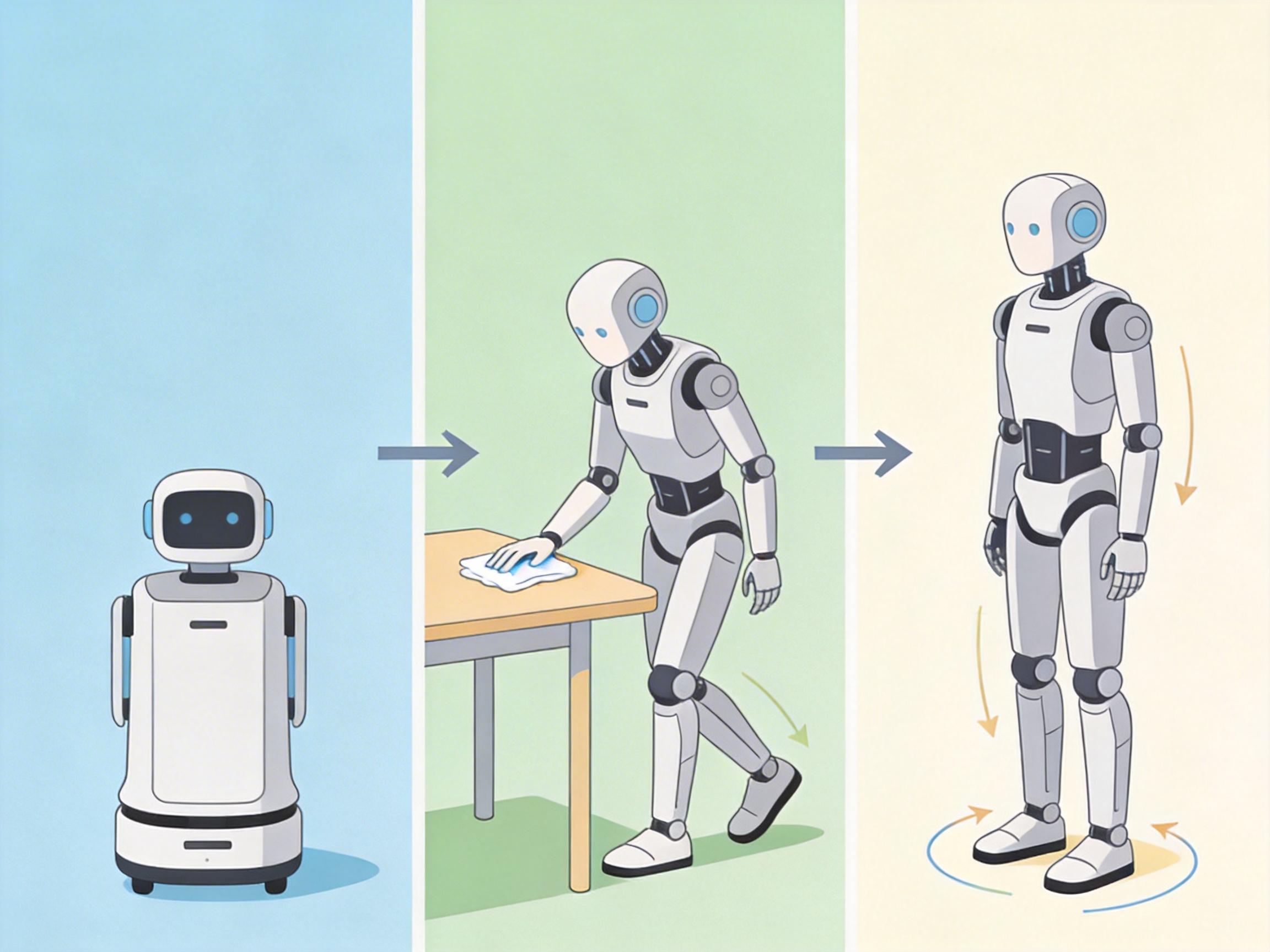
你可以把过去的人形机器人想象成一个手脚不协调的新手:想拿桌子另一边的杯子,得先停下所有动作站稳,小心翼翼迈出两步,再停下,再伸手去抓。这种「走-停-做-停-走」的模式,让机器人做十分钟家务的时间,够你自己把整个屋子收拾三遍。 Helix 02的核心,就是把机器人从这种割裂的模式里解放出来——它实现了「全身自主性」,用一个单一的神经网络同时控制行走、平衡和操作。简单说,就是让机器人的手、脚、身体甚至胯部、脚踝,都能像人一样配合着干活:端着碗走路时自动调整重心保持平衡,手上拿满东西时用胯顶开柜门,双手被占住时用脚踢开洗碗机的门。
这个看似自然的能力,背后是一个叫「loco-manipulation(移动与操作统一控制)」的难题。过去几十年里,机器人的移动和操作是两个独立的系统,走路时顾不上动手,动手时必须停下脚步——就像你用两台遥控器分别控制机器人的腿和手,永远没法同步。Helix 02把这两个系统彻底捏合在了一起,用1000小时人类运动数据训练出的神经网络,替代了原来10万多行手写代码的底层控制。
像人一样思考的三层AI大脑
Helix 02的架构,完全对应了人类的思考模式: 最上层是「慢思考」的System 2,负责理解环境——扫一眼客厅,它能判断出哪些东西是乱的,玩具该丢进收纳箱,抱枕要放回沙发,电视该关掉,还能规划出先做什么后做什么的顺序,就像你回家后在脑子里过一遍家务清单。 中间层是「快思考」的System 1,以每秒200次的频率,把视觉、触觉、身体感知到的所有数据,转化成每个关节该动到什么位置的指令——就像你抬手擦桌子时,大脑自动计算胳膊该抬多高、手腕该用多大劲。 最关键的是新增的「本能层」System 0,它以每秒1000次的频率运行,专门负责平衡和全身协调。就像你走路时不用刻意想怎么落脚,身体会自动调整重心避开障碍物,这个层让机器人在擦桌子的同时迈步,不会因为重心偏移而摔倒。
更有意思的是,从厨房到客厅,这套系统不需要更换任何算法,也不需要专项优化——只要给它喂更多不同场景的训练数据,它就能学会新技能。这和大语言模型的逻辑如出一辙:不是专门编程让它做家务,而是看的家务场景够多,能力就自然涌现了。
离走进普通家庭还差三道坎
但现在就喊「家用机器人时代来了」,还为时尚早。 第一道坎是价格。目前这款机器人的预估售价在5万到10万美元之间,就算是订阅制,每年也要5000美元——这远不是普通家庭能承担的。第二道坎是真实环境的复杂度:演示里的客厅是精心布置的「理想场景」,而真实的家里有乱跑的宠物、突然窜出来的小孩、堆成山的快递盒,还有各种形状不规则、材质柔软的物品,这些都是机器人目前还难以应对的变量。第三道坎是用户的接受度:当一个和人差不多高的机器人在你家里走来走去,你真的能放心吗?隐私、安全、甚至「恐怖谷效应」,都是横在用户和机器人之间的隐形墙。 不过,Helix 02的意义,从来不是今天就能让机器人上岗做家务。它证明了一条可行的路径:用统一的AI架构+更多的真实数据,就能让机器人学会越来越多的技能。而家务场景的数据,恰恰是最容易规模化的——毕竟每个家庭每天都在产生这些「不想做但不得不做」的事。
从春晚舞台上的吹拉弹唱,到客厅里擦桌子收玩具,人形机器人终于从「炫技」走向了「实用」。这背后的逻辑很简单:技术的终极价值,从来不是做人类做不到的事,而是帮人类省掉不想做的事。 数据喂得够多,机器人就能学得够快。也许再过十年,你下班回家时,真的能有一个手脚麻利的机器人,把你不想做的家务都悄悄做完了。 数据驱动的机器人,正在把家务变成选择题。