对抗知识焦虑,从看懂这条开始
App 下载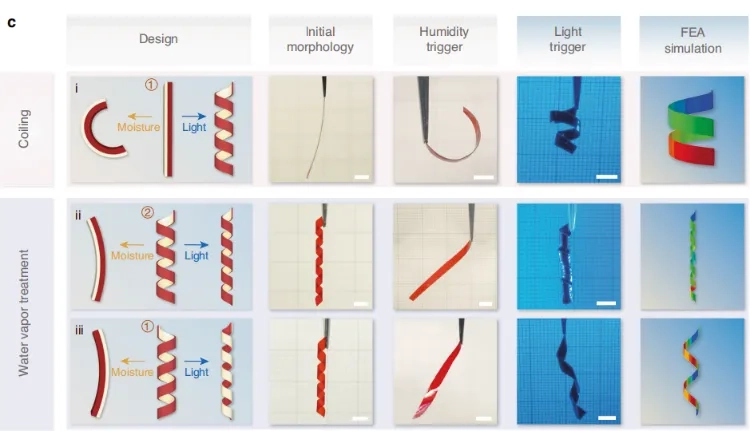
无芯片无电池,一束激光指挥软体机器人干活
全息圆盘|南京大学|激光操控|光学大脑|软体机器人|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载全息圆盘|南京大学|激光操控|光学大脑|软体机器人|具身智能|人工智能
想象一下:你拿起一支几十块的激光笔,照向桌上的软体抓手——它没有芯片,没有电池,甚至连一根电线都没有,却能顺着激光投影出的方块图案,精准抓起对应形状的物体;再照向地上的四足机器人,它会先展开湿度触发的花瓣盖,露出藏在里面的全息圆盘,你按顺序读取红、绿、黄、蓝的荧光密钥,它就会一步步走出迷宫。
这不是科幻片里的场景,而是南京大学马玲玲、王瑜、陆延青团队刚做出来的现实。他们给软体机器人装了个「光学大脑」,让机器自己带着任务说明书,不用编程,不用按钮,一束光就能完成所有操控。但这背后,藏着的是对传统机器人逻辑的彻底改写。
要让机器人摆脱电子设备,核心是把信息「装」进它的身体里——这就得靠液晶全息术(liquid crystal holography)。你可以把它理解成在机器人的材料里刻了一张永久的全息照片:用数字微镜阵列(DMD)光刻系统,把预设的指令图案「写」进液晶聚合物里,液晶分子会顺着图案重新排列,形成微米级的周期性微结构。当圆偏振激光照上去,这些微结构就会像投影布一样,把指令图案清晰地投射出来。
但真实的机制比这更精确:液晶分子的光学各向异性,让它对光的偏振态极度敏感,不同的排列方向会让激光产生特定的衍射和波前调制,最终还原出预设的文字或图形。这相当于把任务指令变成了机器人身体的一部分,不需要外部存储,也不需要电子读取设备。
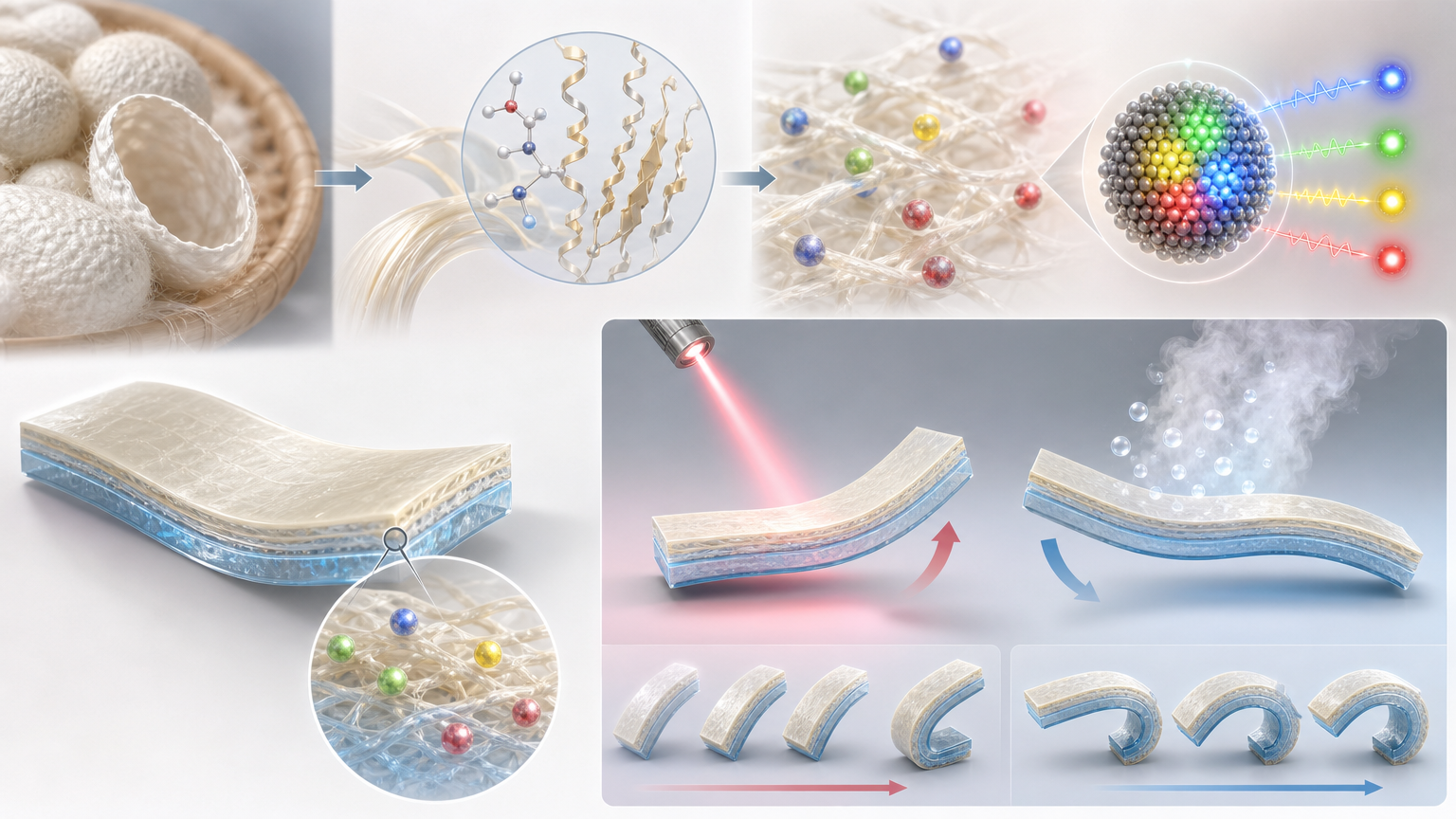
团队还找了个绝佳的「搭档」——从蚕茧里提取的丝素蛋白。这种天然材料遇水蒸气会快速塑形,还能掺杂上转换纳米颗粒:在近红外激光照射下,这些颗粒会发出蓝、绿、黄、红四种荧光,每种颜色对应不同的信息,像给机器人配了一套彩色密码本。两种材料叠在一起,就成了一个双响应驱动器:光照时朝一边弯,加湿时朝另一边弯,一个驱动器就能完成两种完全不同的动作。
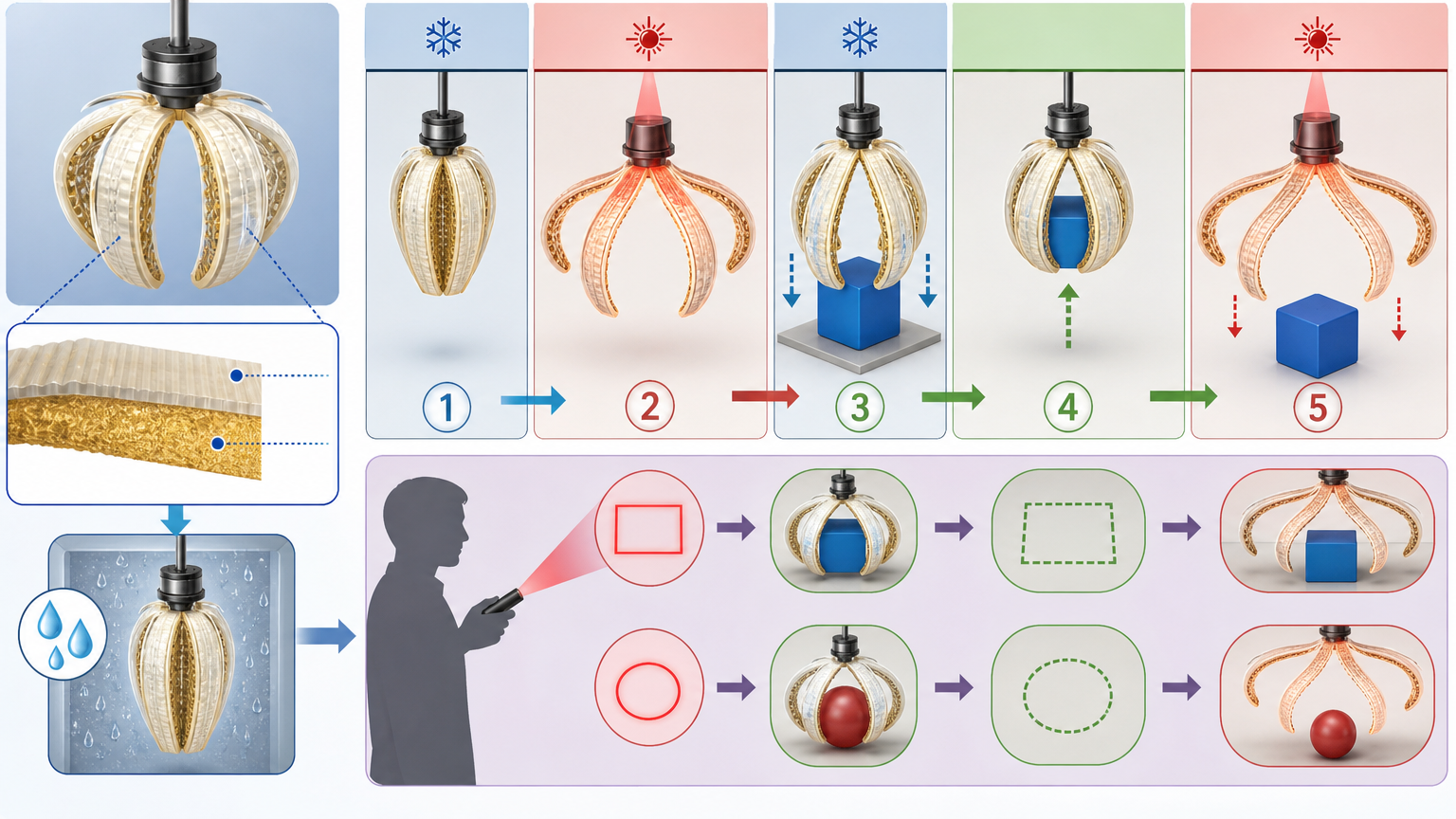
智能抓手是这套系统最直观的展示。它的四条手臂都是液晶聚合物和丝素蛋白的双层结构,因为提前经过高湿度处理,初始状态是闭合的。用激光照射手臂,液晶层受热收缩,手臂就会张开;移到物体上方关掉激光,手臂冷却回弹,就能稳稳抓住物体;到了目标位置再照一次,手臂再次张开释放。整个过程没有任何电子控制,操作者只需要看着激光投影出的图案——照方块就抓方块,照圆形就抓圆形,完全是「傻瓜式」操作。
更精妙的是迷宫行走机器人。它的身体中央藏着一个刻了四组指令的全息圆盘,上面盖着一个花瓣形状的双层盖子:平时是闭合的,喷点水雾就会张开,这是第一层加密。然后用激光照射圆盘,会投影出方向指令,但这还不够——四个花瓣里分别掺了四种颜色的上转换颗粒,必须按指定顺序读取荧光颜色,才能解锁有效指令。四种颜色有256种排列组合,只有拿到正确的密钥,才能让机器人按「向前、左转、右转、向前」的顺序走出迷宫。

一次激光照射,机器人的腿会向下弯曲,关掉激光后回弹的力会推动身体移动3.5毫米。反复照射,就能让它稳稳地朝指定方向前进。关键是,这一切都不需要电池,不需要芯片,只要一束几十块钱的激光笔就能实现。
过去我们总觉得,机器人的智能必须依赖电子芯片和算法,但这个研究戳破了一个误区:智能不一定需要电子元件,它可以是材料本身的属性。
传统软体机器人的痛点很明显:它们柔性好、能变形,能钻进狭窄空间完成任务,但所有的指令都来自外部控制——要么靠人直接操作,要么靠外部电脑编程,机器人自己既不能存储信息,也不能告诉人「我该做什么」。而这个「光学大脑」,相当于让机器人自己带了一本可读取的说明书,把信息存储和任务指引直接融合到了材料里。
更重要的是,它解决了极端场景下的核心问题:在深海、高辐射山洞或者人体内部,电子设备很容易失效,但光不会。488纳米的可见光和980纳米的近红外激光能轻松穿透人体组织,也能在黑暗的极端环境里精准传递指令。而且这套系统的硬件成本极低,操作门槛几乎为零,这意味着它能真正走进那些传统机器人到不了的地方。
当然,它也有局限:目前的指令还需要人来读取和执行,还做不到完全自主;材料的耐久性和光学穿透性也还需要进一步优化。但不可否认的是,它开辟了一条全新的路径——让机器人的「智能」从芯片里,回到材料本身。
当我们都在追求更强大的芯片、更复杂的算法时,这个研究却把目光转向了最基础的材料和光。它没有给机器人装更聪明的「大脑」,而是给了它一套更直接的「语言」——用光和材料的对话,代替电子信号的传输。
未来的某一天,也许我们会看到微型的光学软体机器人,顺着激光的指引钻进人体血管里清除血栓;也许会看到它们在深海的高压环境里,靠一束光完成探测任务。
智能的终极形态,或许是回归简单。 当机器不再需要依赖复杂的电子系统,而是能像生物一样,用身体直接感知和响应世界,那才是真正的「柔性智能」。