对抗知识焦虑,从看懂这条开始
App 下载
AI开车不再鬼画符,同济团队换了个核心思路
物理约束|扩散模型|轨迹规划|同济大学|自动驾驶|人工智能
对抗知识焦虑,从看懂这条开始
App 下载物理约束|扩散模型|轨迹规划|同济大学|自动驾驶|人工智能
想象你坐在一辆号称全栈自研的自动驾驶车里,前方路口要左转。AI的大脑算出了一条轨迹——终点是对的,但过程能让你攥紧扶手:轨迹像锯齿一样忽左忽右,转弯急到像要把方向盘掰断,甚至半个车身都轧到了路沿石外。这不是科幻片的夸张,而是当前端到端自动驾驶的真实尴尬:AI能规划到目的地,却总生成违背物理规律的“鬼画符”轨迹。同济大学的团队刚解决了这个问题,他们的方法简单到直击要害——别让AI盯着噪声瞎琢磨,直接教它画一条符合物理规则的干净轨迹。
过去十年,用扩散模型做自动驾驶规划的思路一直是“以噪声为中心”:AI先学习轨迹上的噪声分布,再通过去噪间接生成轨迹。这就像你想教孩子画直线,却只让他擦除画布上的乱线,而不是直接告诉他直线该怎么画。车辆该怎么转弯、能不能轧线,这些规则本来就定义在“干净轨迹”的世界里,非要通过噪声绕个弯,结果自然是轨迹要么曲率突变,要么直接开出车道。
团队做了个统计:那些直接被判零分的规划场景里,超过一半是因为轨迹偏离了可行驶区域,紧随其后的就是违规碰撞。问题的根源就在于,AI学的是怎么消噪,而不是怎么开得安全。
同济大学的FeaXDrive方法,核心就是把“干净轨迹”当成扩散模型的中心——AI不再预测噪声,而是直接预测车辆未来该走的每一步。这个看似简单的范式转换,让所有安全约束都能直接作用在轨迹上,不用再绕弯子。
他们给这套方法加了三层保险:
第一层是**自适应曲率约束训练**。AI学开车时,会实时根据速度调整转弯的“规矩”:低速时防轨迹“抽风”,高速时防离心力超标——就像人类司机知道高速不能急转,低速可以微调方向。团队用可微平滑算法计算轨迹曲率,再根据速度动态设置阈值,让AI从骨子里学会画平滑的轨迹。
第二层是可行驶区域实时引导。AI每规划一步,都会用高清地图生成一个“有符号距离场”——相当于给道路画了个看不见的围栏,轨迹点一旦靠近边界,就会被轻轻拉回车道。这不是事后补丁,而是在规划过程中每一步都实时修正,保证轨迹始终稳稳待在可行驶区域里。
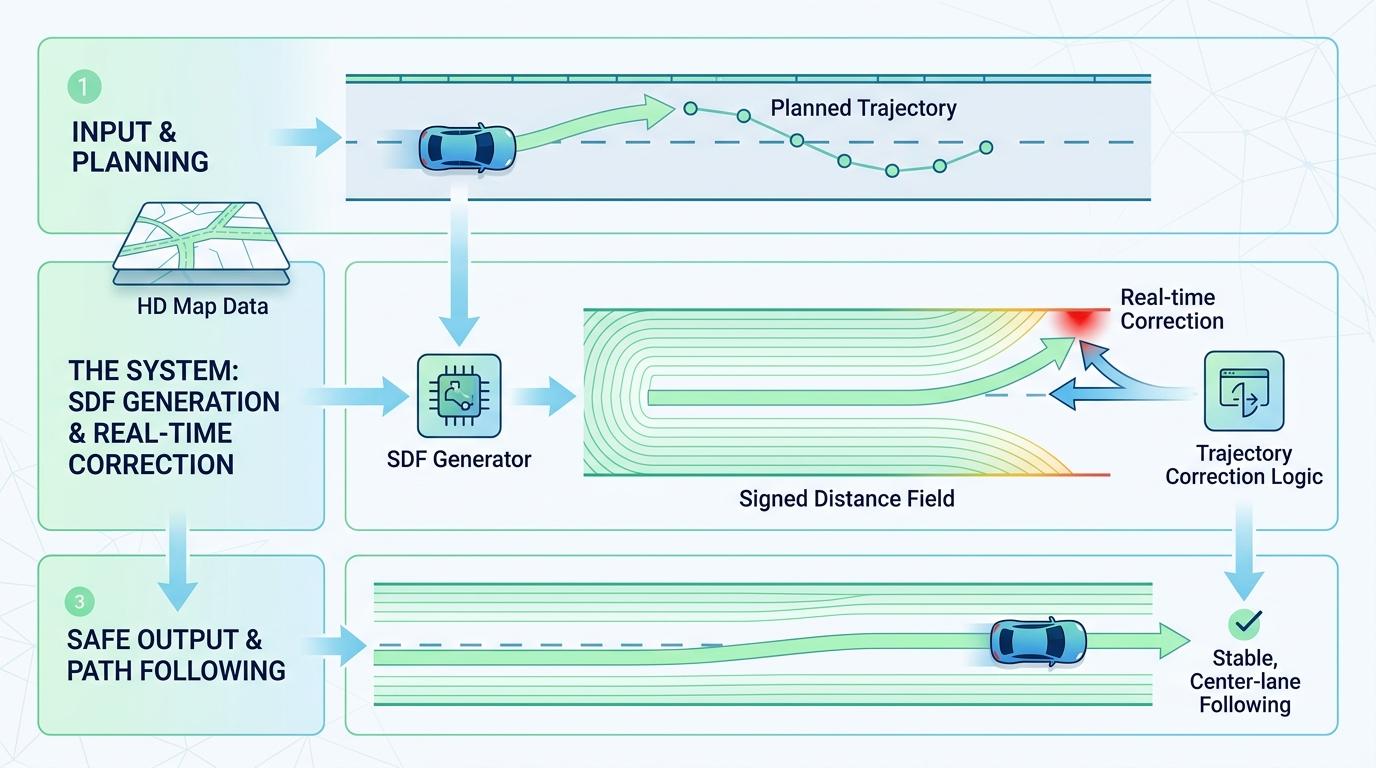
第三层是可行性感知的强化学习微调。AI学会基础操作后,再通过强化学习“刷题”:不仅要开到目的地,还要奖励那些更平滑、更合规的轨迹,惩罚违规操作。最终,AI生成的轨迹不仅能完成任务,还像老司机一样稳。
在权威的NAVSIM仿真测试里,FeaXDrive的表现直接碾压了传统方法:仅靠模仿学习,曲率违规率就降到了0.88%,可行驶区域合规率达到97.5%;经过强化学习微调后,曲率违规率也只上升到2.4%,而普通强化学习方法的违规率是15.5%。
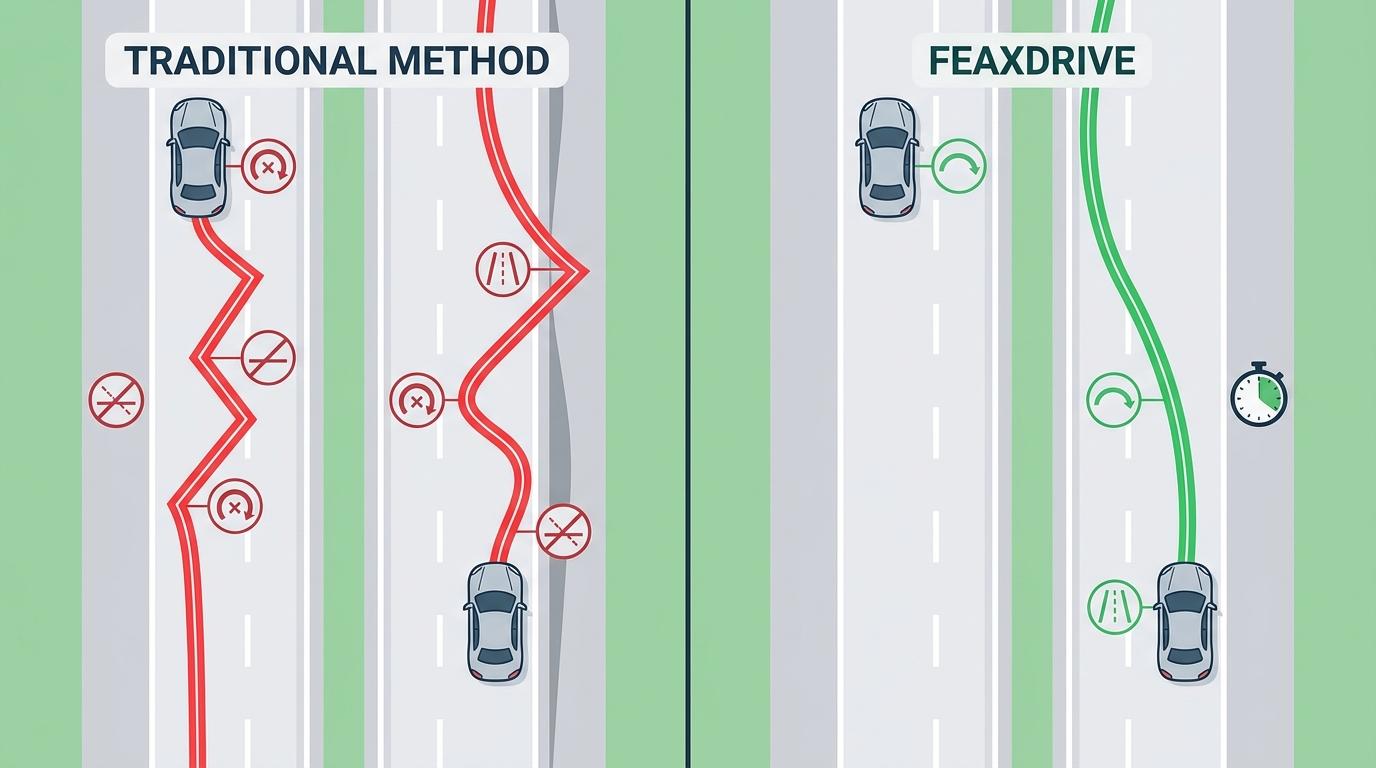
看直观对比更明显:传统方法的轨迹是红色的锯齿,要么转弯急到曲率超标,要么直接开出车道;FeaXDrive的轨迹是绿色的平滑曲线,始终待在车道里,曲率也保持在安全范围。当然,这套方法也有代价:因为每一步都要做地图引导,推理延迟是传统方法的2.5倍——这是用计算资源换来了实打实的安全。
自动驾驶的终极目标从来不是“能开到目的地”,而是“像老司机一样安全地开到目的地”。FeaXDrive的意义,不仅是解决了轨迹“鬼画符”的问题,更是给整个行业指了个方向:与其让AI在噪声里绕弯路,不如直接瞄准最终目标,把安全规则刻进每一步规划里。
未来的自动驾驶,会越来越像经验丰富的人类司机——不是因为它学了多少噪声,而是因为它从一开始就知道,什么才是真正安全的驾驶。以轨迹为中心,才是安全驾驶的起点。