对抗知识焦虑,从看懂这条开始
App 下载
机器人终于学会用手,但卡在了出汗上
投资者大会|散热技术|手部灵巧度|仿生机械手|人形机器人|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载投资者大会|散热技术|手部灵巧度|仿生机械手|人形机器人|具身智能|人工智能
2026年4月的一场投资者大会上,一台178cm高的人形机器人没翻跟头,没举重物,只是安静地给嘉宾递了份伴手礼——这个简单动作,却比任何炫技都更让行业震动。它的手能捏起羽毛不落地,能拧动螺丝不打滑,甚至在连续作业半小时后,还能保持指尖的精准力度。更让人意外的是,这双手在高强度运作时,居然会像人类一样「出汗」。
这不是科幻电影的特效,而是当前人形机器人领域最棘手的技术突破——当我们终于让机器人的手追上人类的灵活度,却发现最大的瓶颈,居然是如何给这双手「降温」。
你可以把机器人的腿理解成重型卡车的底盘——需要的是力量和稳定性,电机和减速器有足够空间安放,哪怕用高减速比齿轮放大扭矩, bulky的结构也能容纳。但手不一样,它是要穿针引线的精密仪器,是机器人「具身智能」——让AI用身体感知世界的核心——的最后一块拼图。
人类的手有27个自由度,能在捏碎核桃和捏起蚂蚁间精准切换力道。要复刻这种能力,机器人的每根手指都得塞进微型电机,而电机的扭矩会随尺寸缩小呈三次方暴跌——把电机缩小到原来的1/10,扭矩只剩1/1000。为了补够力道,工程师只能用100:1甚至288:1的高减速比齿轮,代价是摩擦剧增、响应迟滞,原本该灵活的手指变得又硬又钝。
更致命的是散热。单只手的电机功率就能超过100W,30%的功率会变成废热闷在指节里。没有足够空间装风扇,连续拧1000次螺丝后,线路就可能被烧断。这也是为什么之前的机器人要么手笨得像钳子,要么只能在实验室里做几分钟演示。
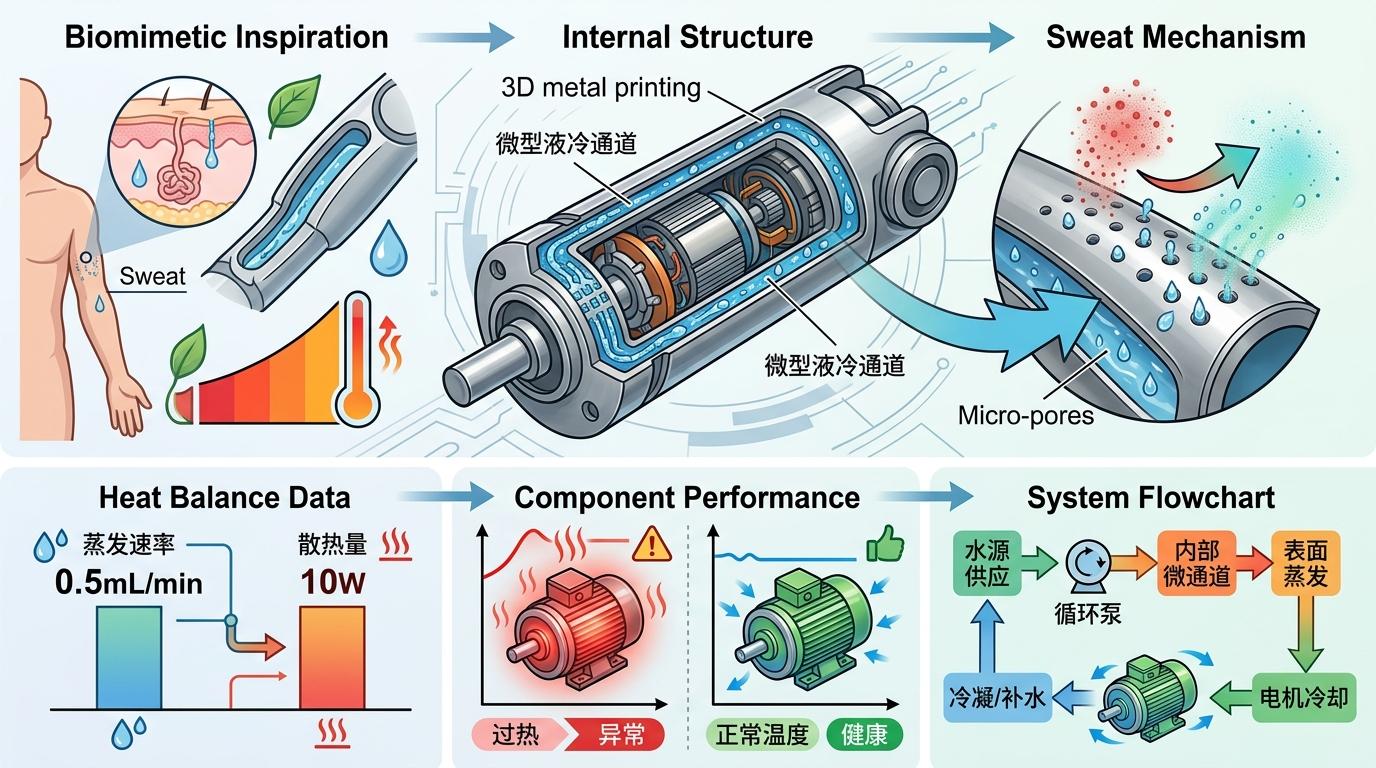
那台会「出汗」的机器人,用了个听起来像仿生学作业的方案:用金属3D打印在小臂里刻出微型液冷通道,像人类汗腺一样,靠水分蒸发带走热量——每分钟蒸发0.5mL水,就能带走10W热量,刚好能把电机的温度压在安全线内。这个看似简单的设计,解决的是高自由度灵巧手商业化的核心障碍:长时间稳定作业。
但光有「出汗」的手还不够,机器人得知道「怎么摸东西」。人类的手能凭触感判断鸡蛋生熟、布料软硬,靠的是全掌分布的触觉感受器。现在的高端灵巧手已经能做到全掌8200平方毫米的触觉覆盖,相当于把整个手机屏幕的传感器贴在手上。更关键的是「动作重定向」技术——把人类捏杯子的力度、角度,转换成机器人关节的精确角度,避免出现「穿模」「抓空」的尴尬。
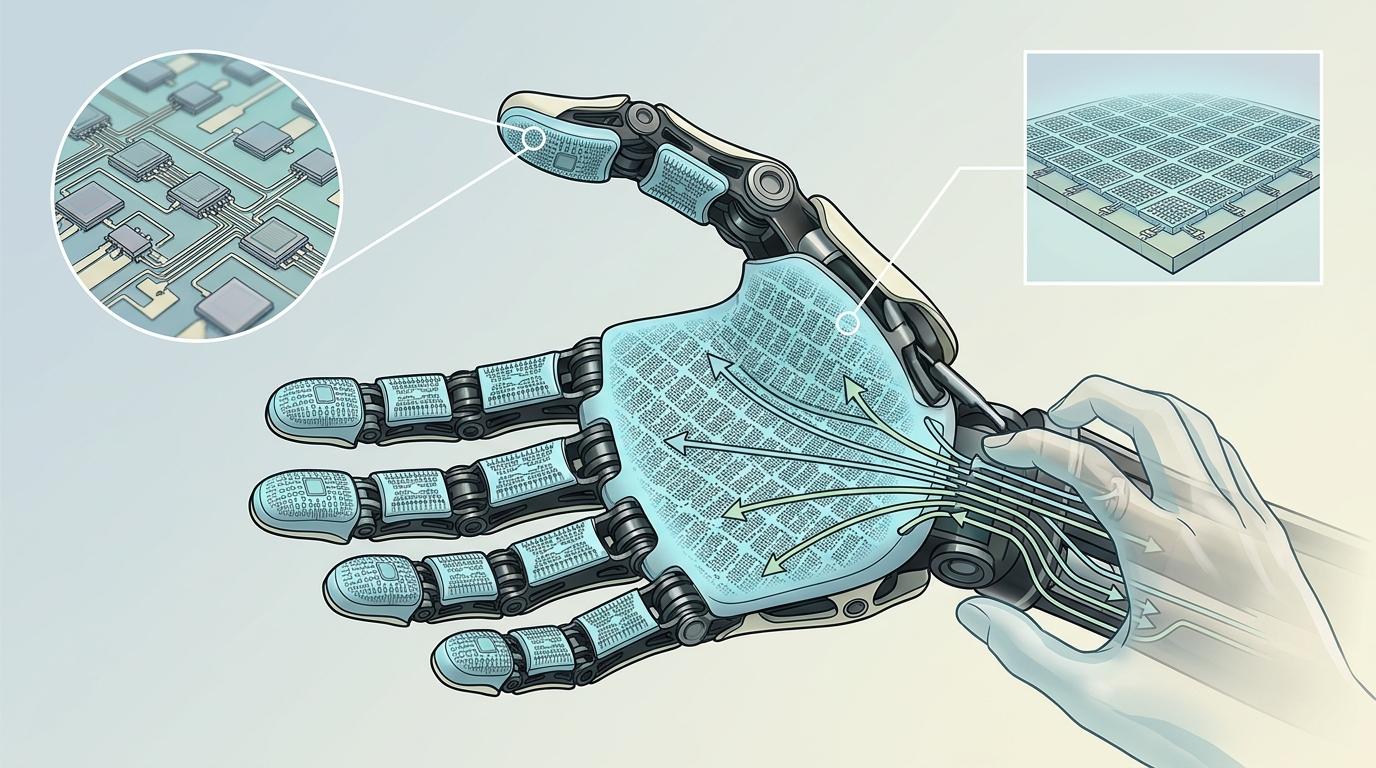
比如哥伦比亚大学的团队,让机器人手在完全黑暗的环境里,仅凭触觉就把不规则的积木在掌心旋转,还能稳稳抓住。这种能力靠的不是视觉,而是触觉传感器每秒传回的上千组数据,再通过强化学习算法,像人类一样「摸出」物体的形状和重心。
现在的灵巧手已经能在实验室里解魔方、系鞋带,但要走进工厂和家庭,还得跨过三道坎。
第一道是成本。目前高端灵巧手的单价能达到数万美元,相当于一辆家用轿车的价格——这不是因为技术有多难,而是核心部件微型电机、高分辨率触觉传感器还没实现量产。但随着国内企业开始批量生产模块化灵巧手,成本已经在以每年30%的速度下降,就像早年的智能手机一样。
第二道是可靠性。工业场景里,机器人的手要每天拧上万次螺丝,腱绳、弹簧这些柔性部件很容易磨损。现在最好的灵巧手能做到15万次循环寿命,但离工业要求的百万次还有差距。材料学家正在尝试用碳纤维复合材料替代传统的尼龙腱绳,能把寿命提升3倍以上。
第三道是「通用性」。现在的灵巧手大多是为特定场景设计的——拧螺丝的手捏不了鸡蛋,捏鸡蛋的手拧不动螺丝。未来的方向是模块化:像乐高积木一样,换个指尖模块就能切换功能,配合大语言模型的指令,真正做到「拿得起螺丝刀,也拿得起咖啡杯」。
我们总以为人形机器人的未来是跑赢人类、举起千斤重物,但真正让它们走进生活的,是能递一杯温度刚好的水,能系好松开的鞋带,能在你拧不开瓶盖时伸出手。
「机器人的终极进化,是学会像人一样用手。」这句话听起来平淡,却戳中了具身智能的核心:智能不是存在于云端的代码,而是能感知、能触碰、能在真实世界里完成微小任务的能力。当机器人的手终于能像人类一样出汗、一样感知,我们离那个「机器人帮你做家务」的未来,就又近了一步。
毕竟,能好好用手的机器人,才是真正能帮上忙的机器人。