对抗知识焦虑,从看懂这条开始
App 下载
从“看”到“做”,具身智能重构产业逻辑
工业自动化|自主操作|智能工厂|人形机器人|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载工业自动化|自主操作|智能工厂|人形机器人|具身智能|人工智能
北京亦庄的智能工厂里,一台人形机器人正把精密零件嵌进汽车底盘——它不是在重复预设动作,而是在发现零件位置偏移后,自主调整了机械臂的角度和力度。放在三年前,这得靠资深技师盯着屏幕手动操作;放在十年前,连想都不敢想。
这就是具身智能——让AI跳出数字屏幕,附在物理实体上,既能“看见”环境,又能“动手”解决问题的技术。它正在把我们熟悉的“自动化”彻底改写:不再是机器听人的话,而是机器和人一起适应世界。但这股浪潮到底是怎么从实验室走到工厂车间的?又会把我们的产业带向哪里?
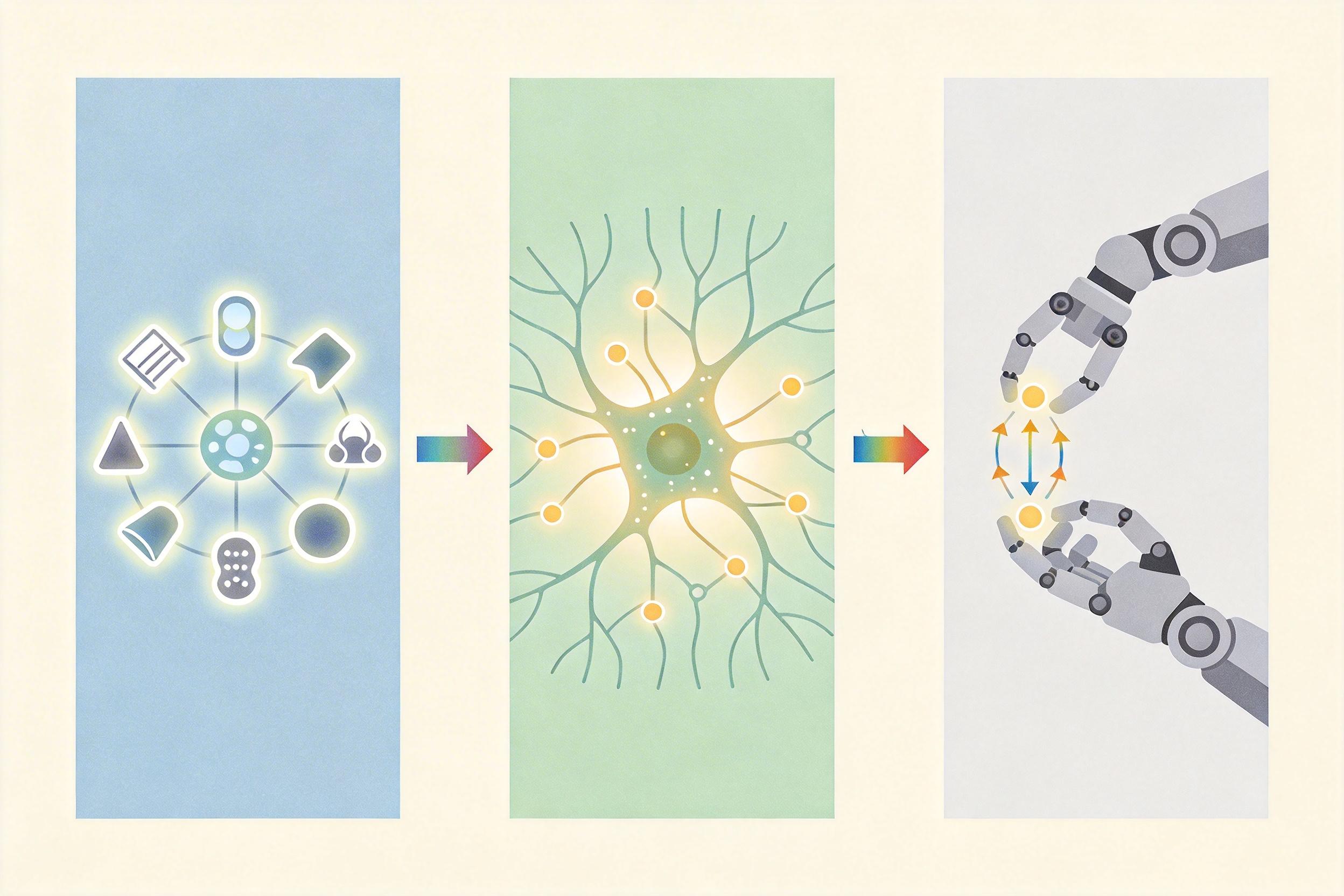
过去的工业AI更像个“观察员”:摄像头盯着流水线找次品,传感器记录设备温度,数据传到电脑里生成报表——但要解决问题,还得靠人动手。具身智能要做的,是把“看”和“做”拧成一个闭环。
你可以把这个闭环想象成一个厨师:眼睛看火候(感知),脑子判断要不要翻锅(认知),手立刻动起来(行动),同时指尖的触感还会反馈给脑子,调整下一次动作的力度。在机器人身上,这个逻辑被拆成了三层:第一层是多模态传感器,相当于机器人的眼睛、皮肤和耳朵——它能同时捕捉视觉画面、指尖的压力甚至环境的噪音;第二层是“大脑”模型,用大语言模型和强化学习算法把感知到的信息翻译成动作指令;第三层是执行器,也就是机器人的手脚,能精准完成抓取、组装、行走这些物理动作。
最关键的突破在“大脑”和“手脚”的配合上。以前的机器人程序是“点对点”:一个动作对应一个指令,换个零件就得重新编程。现在的具身智能模型能通过数字孪生技术,在虚拟环境里先“练手”——比如模拟100种零件的组装过程,把错误和调整都记下来,再放到真实场景里,就能自主应对80%以上的突发状况。北京那家工厂的机器人,就是靠这套逻辑,把装配精度提升了25%,还能24小时连轴转。
具身智能不是某一个技术的突破,而是整条产业链的“集体进化”。上游的传感器厂商在做柔性触觉传感器,能贴在机器人手上像皮肤一样感知压力;中游的机器人公司不再只造硬件,而是把算法和机械结构一起设计——比如给机械臂装个“刹车”,碰到人就立刻停下;下游的工厂则在重构生产流程,不再让机器适应流水线,而是让机器跟着零件走。
物流仓储是最直观的例子。以前的AGV机器人只能沿着地上的磁条走,换个货架就得重新贴条;现在的AMR机器人靠激光雷达和AI导航,能自己规划路线,还能和同伴“商量”谁先过走廊。中国的AMR厂商已经占到全球市场的一半,亚马逊、DHL这些国际物流巨头都在批量采购。在上海的一个无人仓库里,300台AMR机器人一天能处理10万单包裹,拣货效率是人工的3倍,错误率却不到0.1%。

更值得注意的是,场景反过来在定义技术。医疗场景需要机器人的手像医生一样轻柔,于是柔性机器人和力反馈技术快速成熟;智慧城市需要机器人能在复杂路况下送快递,于是多传感器融合和动态路径规划成了研发重点。这种“场景拉着技术跑”的逻辑,和过去“技术推着场景走”完全不同——它让具身智能的落地速度比想象中快得多。
当具身智能成为全球产业的新赛道,中美欧亚的玩法各有不同:美国靠前沿研发和资本投入,在多机器人协同和AI算法上领先;欧洲盯着安全合规和绿色制造,把机器人的可靠性做到极致;日本则在仿人机器人的情感交互上深耕。
中国的优势,在于完整的产业链和庞大的应用场景。2024年中国新增工业机器人安装量超过全球其他国家总和,本土机器人产量已经占到总需求的57%——从传感器到芯片,从算法到整机,几乎所有环节都能在国内找到供应商,成本只有海外产品的一半。更重要的是,中国的工厂、仓库和医院正在提供海量的真实数据,让机器人能在实际场景里快速迭代:比如外卖机器人在小区里跑上几个月,就能学会怎么躲电动车、怎么等电梯,这种数据是实验室里练不出来的。
当然,挑战也很明显:高端芯片还依赖进口,多模态感知的实时处理能力还有瓶颈,仿真到现实的迁移误差还没完全解决。但这些问题正在被快速填补——2026年中国发布了首个仿人机器人国家标准,本土芯片厂商也在推出专门针对具身智能的嵌入式AI芯片。
当北京工厂里的机器人完成最后一个零件的组装,它其实完成的是一次产业逻辑的跨越:从机器服务于流水线,到机器适应于场景。
具身智能真正的意义,不是造出更聪明的机器人,而是让智能从数字世界走进物理世界,和我们的生产、生活无缝对接。它不是要取代人,而是要把人从重复、危险的劳动中解放出来,去做更有创造性的事。
智能不再是屏幕上的数字,而是能动手解决问题的力量。这股力量,正在重构我们熟悉的产业,也在重新定义人和机器的关系。