对抗知识焦虑,从看懂这条开始
App 下载
1.7万造出灵巧机械手,中小实验室终于能上手
科研硬件成本|肌腱驱动|3D打印|仿人机械手|苏黎世联邦理工学院|智能制造|前沿科技
对抗知识焦虑,从看懂这条开始
App 下载科研硬件成本|肌腱驱动|3D打印|仿人机械手|苏黎世联邦理工学院|智能制造|前沿科技
想象一下:你在实验室里,盯着屏幕上跑了三个月的灵巧操作算法,却只能在仿真里看它拿起虚拟的杯子——因为能承载算法的真实机械手,售价是你半年的科研经费。过去十年,这是全球成百上千个中小实验室的日常:软件在狂奔,硬件却卡在了六位数的价格门槛上。直到2026年3月,苏黎世联邦理工学院的团队把这个门槛砸到了1.7万人民币——一只17个自由度的仿人机械手,能用普通3D打印机造出来,新手8小时就能装完,还能拧开罐头、拿起钢笔。它凭什么能做到?
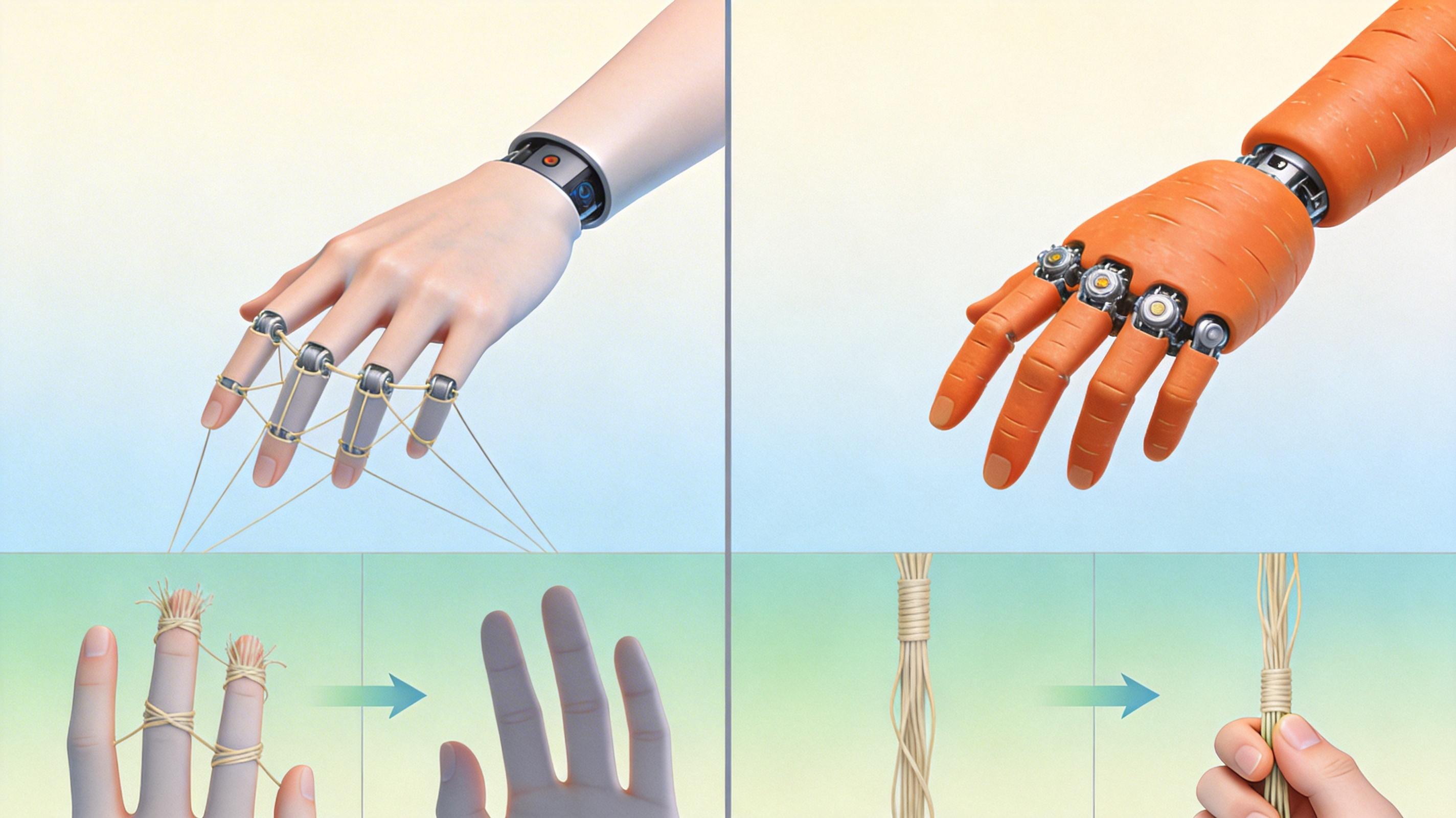
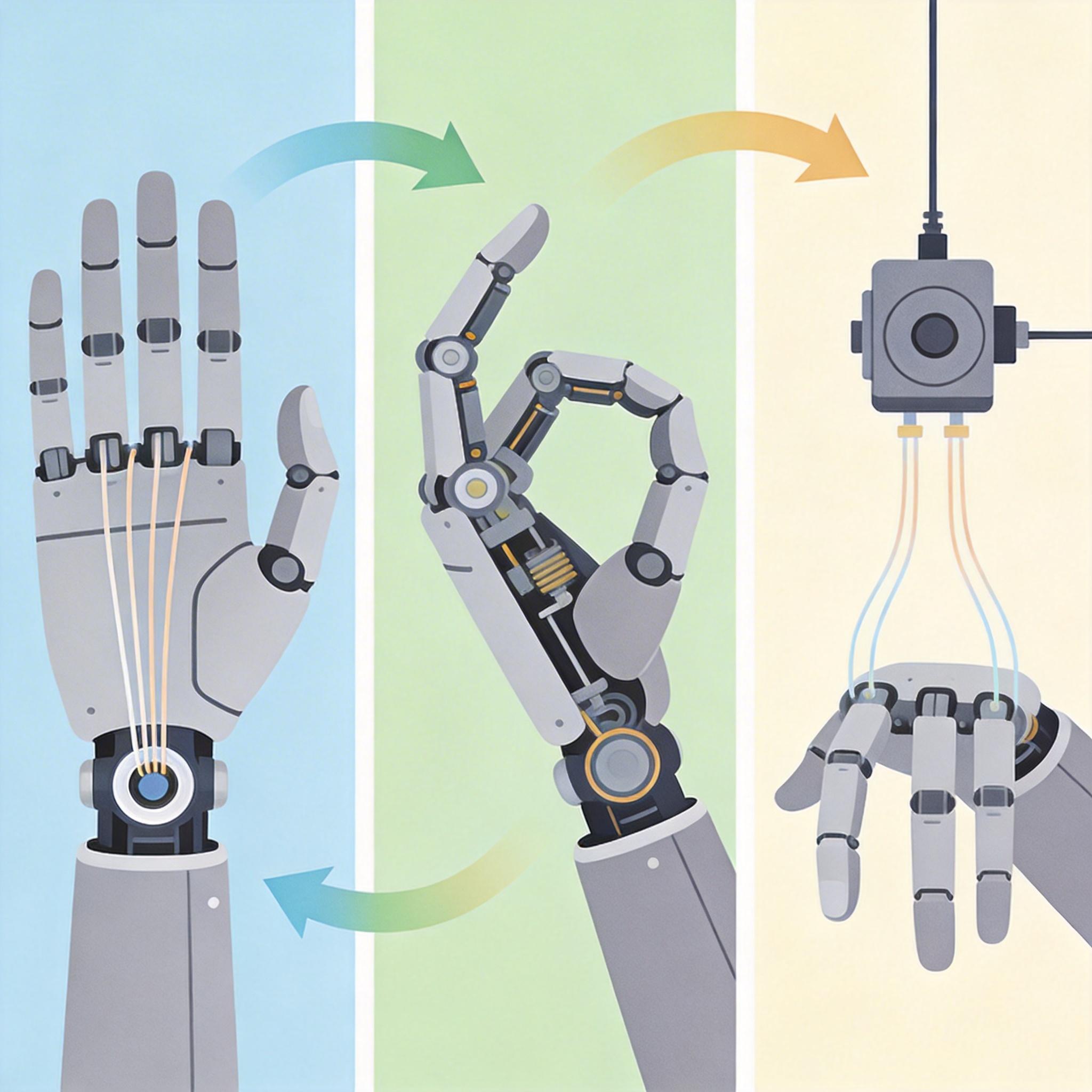
你可以把肌腱驱动理解成“用线拉着手指动”——就像你用线操控木偶,电机藏在手腕里,靠细细的“鱼线”(也就是肌腱)拉动各个关节。这种设计能让手指保持人手般的纤细灵活,不像传统直驱手那样,把电机嵌在指节里,肿得像胡萝卜。但过去的肌腱驱动手有个致命bug:线会松、会磨,用不了多久就抓不准东西,拆修更是要把整只手全拆开。
这个团队的解法全是“笨功夫里的巧劲”:所有肌腱都绕过光滑的金属小钉子,绝不直接碰3D打印的塑料件,减少摩擦;拐弯的地方套上特氟龙管,让线滑得更顺;电机上装了个棘轮卷轴,线松了?转两下就能重新拉紧,连螺丝刀都不用。最绝的是“可弹出关节”——就像人的关节脱臼,遇到太大的力,关节会先“弹出来”而不是直接断,按回去就能用,连零件都不用换。
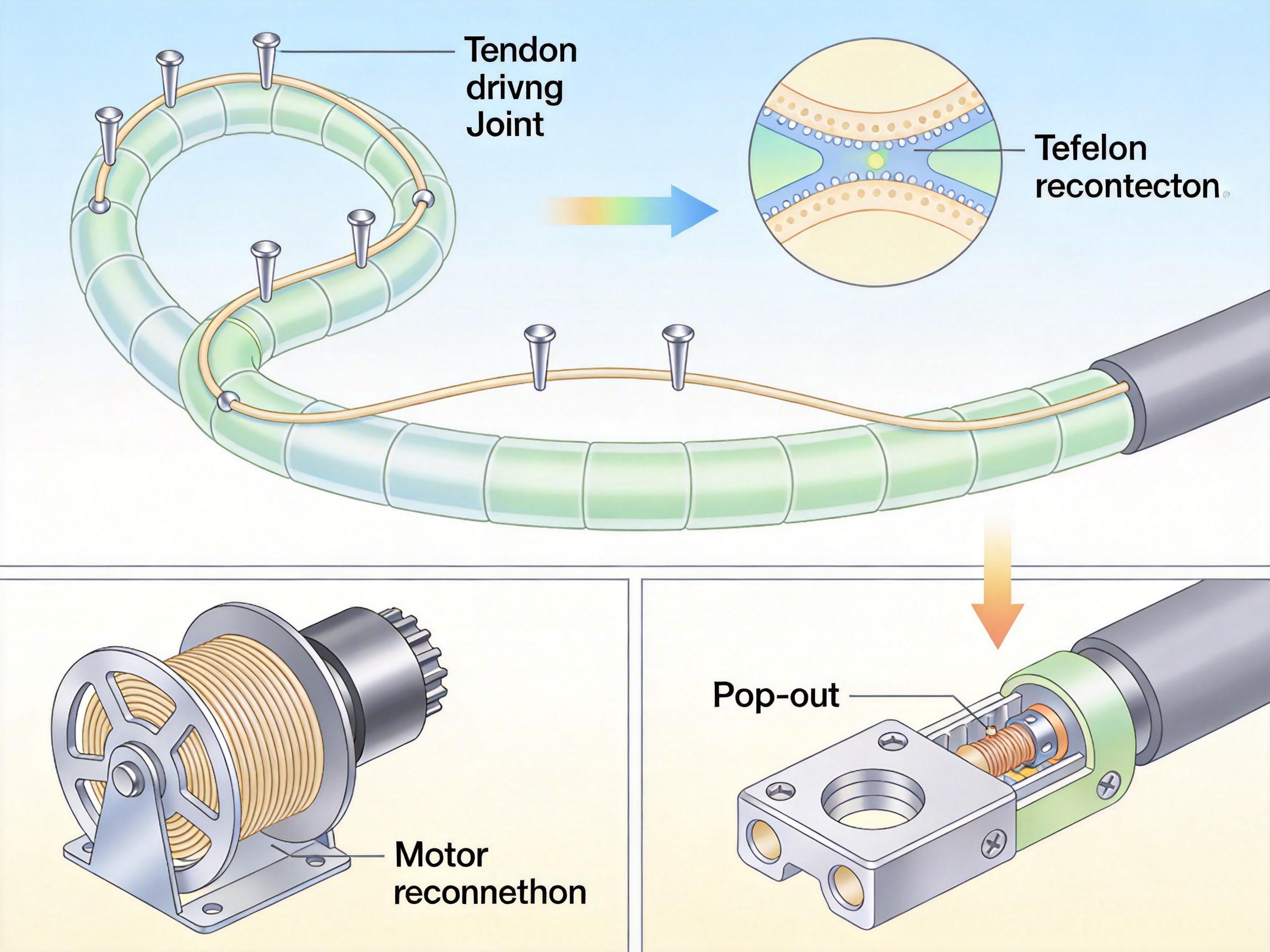
他们还把肌腱的位置算到了极致:每根线都刚好从关节旋转中心附近穿过,这样每个关节的运动都是独立的,校准的时候系统自己把关节掰到极限,就能算出电机和手指角度的对应关系,几分钟就能搞定,连外部传感器都不用。
过去,一只能做精细操作的机械手,要么是Shadow Hand那样的“科研奢侈品”——10万美元起步,维护要找原厂工程师;要么是便宜点的直驱手,动作慢、外形臃肿,连快速抓个球都费劲。这个团队的目标很明确:要一只“能用、能修、能造”的手。
所有结构件都能用几百美元的普通FDM 3D打印机打印,材料就是常见的PLA塑料,整个硬件成本压到了2000瑞士法郎以下。更重要的是,他们把所有设计文件、控制代码、甚至仿真环境全开源了——你可以在GitHub上下载所有图纸,自己打印、自己组装,甚至自己改设计。
测试数据也够实在:连续抓握2250次、运行20小时,肌腱没松、电机没热;跟踪关节角度的精度和卡内基梅隆的LEAP Hand相当,动作却更顺滑,不会像直驱手那样一抖一抖的。四指一起抓能拿起10.5公斤的东西,单指能提2公斤——拧个罐头、拿个电钻完全没问题。
当然,这只手不是没有缺点。比如它的触觉传感器,用的是力敏电阻,虽然能感知到0.05牛的力——轻到能拈起一张纸——但硅胶皮肤用个两三千次就会老化,连接的细铜线也可能断;长时间用下来,还是得手动拉紧肌腱;和Shadow Hand比,它的触觉分辨率差远了,也没有那么多自由度。
但这些缺点,恰恰是它的定位决定的:它不是要取代高端实验室的昂贵设备,而是要让那些买不起高端设备的团队,能有一只真能用的手。过去,很多团队的算法只能跑在仿真里,现在他们可以用这只手,把算法搬到现实中,去拿真的杯子、拧真的瓶盖。甚至有教育机构已经用它来教学生——从打印零件到组装,再到写代码控制,学生能亲手走完整个机器人研发的流程。
当我们谈论“科技突破”时,总容易把目光投向那些最顶尖的、最昂贵的技术——比如能达到微米级精度的机械手,或者能模拟上千种触觉的传感器。但有时候,真正能改变行业的,是把“少数人的玩具”变成“多数人的工具”。
这只1.7万的机械手,没有用什么黑科技,只是把过去被忽略的“易用性”和“低成本”,当成了核心目标。它让那些卡在仿真里的算法,终于有了能落地的身体;让那些没那么多经费的实验室,终于能参与到灵巧操作的研究里。
技术的普惠,才是最扎实的突破。