
1 个月前
1 个月前
想象一下:一个机械手抓起一张薄得能透光的纸筒,力度轻到纸筒连褶皱都没起,还精准算出了它0.74克的重量——误差只有3%。换成市面上的商用传感器,一碰就会把纸筒捏扁。这不是科幻片里的场景,是中科大和剑桥大学的团队刚做出来的实验。他们造了个指尖大小的传感器,能感知到0.9微牛的力——差不多是一粒沙子重量的千分之一。更厉害的是,它不仅知道力有多大,还能精准分辨力的方向,角度误差不到2度。这到底是怎么做到的?
你可以把人类指尖的触觉想象成一张密密麻麻的神经网络:每一个机械感受器都是一个小侦探,能分别捕捉压力、振动、滑动这些信号,再传给大脑拼凑出完整的触感。过去的机器人触觉传感器,要么只能测“有没有力”,要么分辨率低到像戴了厚手套摸东西。
这次的突破,核心是一种叫APE的各向异性多孔弹性体——你可以把它理解成一块充满“智能神经”的海绵。里面埋着三样东西:带尖刺的镍颗粒在磁场里排成一条条“神经纤维”,石墨烯纳米片像突触一样把这些纤维连起来,液态金属液滴则是能变形的信号节点。当外力碰到它,这些微观结构会跟着变形,导电通路的变化就会转化成电信号——就像皮肤受到刺激时神经会产生冲动。
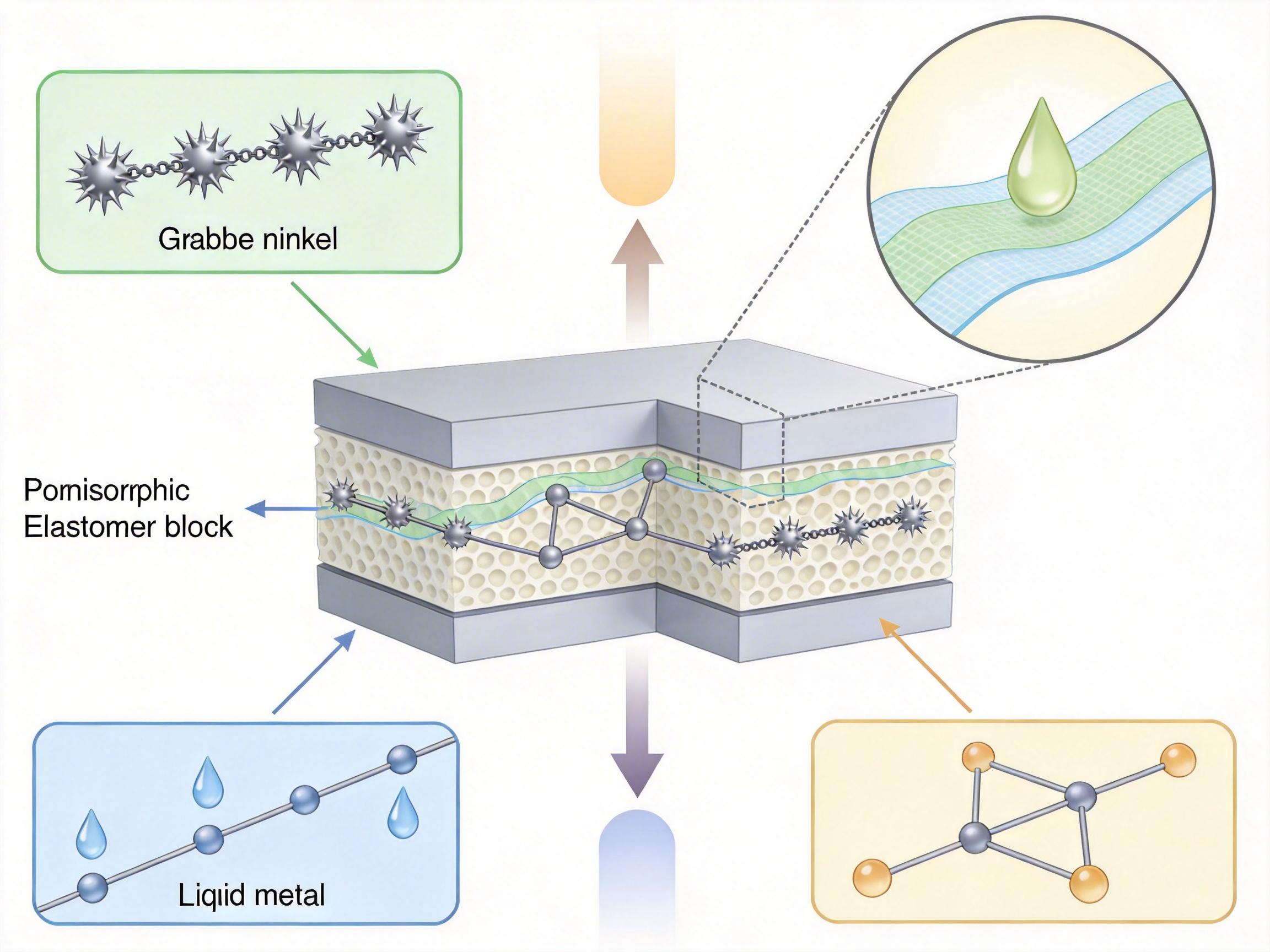
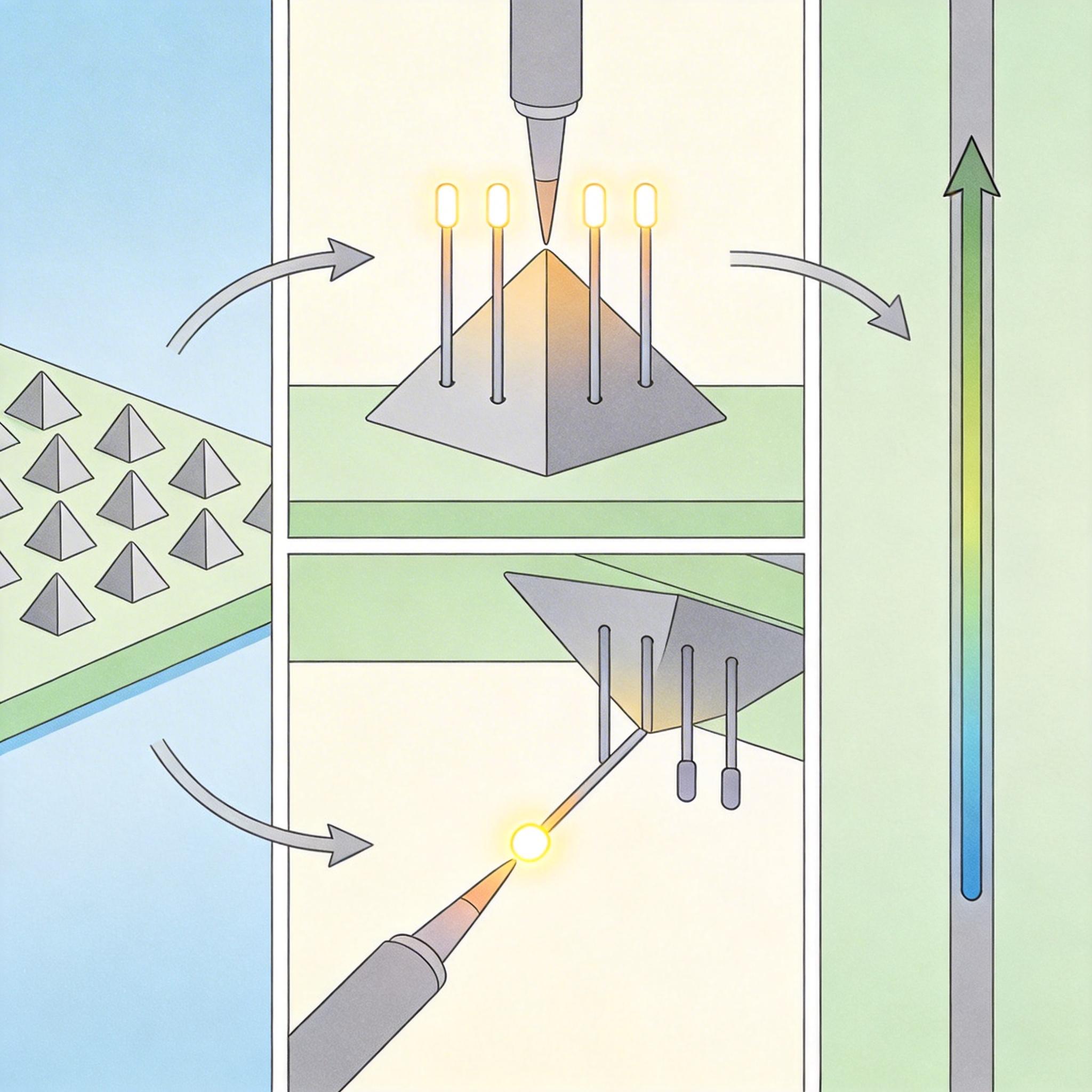
最巧妙的是传感器表面的微米级金字塔结构。每个金字塔底部都有四个电极,垂直压下去时四个电极的信号一模一样;斜着推的时候,受力方向的电极信号会明显变大。通过计算四个电极的信号差,就能反推出力的大小、方向甚至角度,精度能控制在2度以内。
在实验室里,这个传感器已经能完成不少“精细活”:把它装在机械手上,能在铁块刚要滑动的瞬间(剪切力突然下降5%)立刻加大夹持力;抚摸不同粗糙度的表面时,电压波动幅度会从0.95%线性升到6.5%,像人类指尖一样区分光滑玻璃和粗糙砂纸。甚至能把传感器缩小到200微米见方——比圆珠笔尖还小,组成阵列后能分辨不同金属球的密度,适合在显微镜下操作细胞或微电子元件。
但离真正能用,还有两道坎要跨。
第一道是耐用性。现在实验室里的传感器能扛3万次循环,但工业应用至少要10万次起步,甚至得百万次。就像人类的皮肤天天摸东西也不会坏,机器人的“指尖”得经得起反复摩擦和挤压。
第二道是大规模制造。实验室里用光刻布线的方法,成功率不高,批量生产时更容易出问题。就像做手工品和开流水线是两回事,得和产业界合作,把实验室里的“黑科技”变成能稳定复制的产品。
研究团队也很清楚这点:中科大的贠国霖教授正在和人形机器人研究院合作,想把传感器装到真实的机器人指尖上;剑桥大学的Tawfique Hasan教授则直言,得和工程技术成熟的企业联手,才能解决这些落地难题。
这个传感器的意义,不止是让机器人能更灵巧地抓东西。在医疗领域,它可以装在微创手术器械上,让医生隔着屏幕也能“摸到”患者的组织,避免误伤;在假肢里,它能把触感传回到人的神经系统,让截肢者重新拥有“触觉”;甚至在消费电子里,未来的触摸屏可能不止能感知按压力度,还能分辨你是在“摸”还是在“滑”,操作会变得更自然。
现在团队已经在研究给传感器加温度、湿度感知的功能,再结合机器学习,未来它可能不仅能“摸出”物体的硬度,还能直接识别出这是玻璃、塑料还是木头。就像人类的皮肤能同时感知温度、湿度和触感,未来的机器人“皮肤”也会越来越接近真实的生物皮肤。
人类花了几百万年进化出的触觉,现在正在被一点点复制到机器上。我们总说机器人要“更智能”,但智能不止是会计算、会说话,更要会“感知”——像人类一样,能通过触摸理解这个世界。
这个0.9微牛的突破,本质上是机器向“生命”靠近的一小步。未来的机器人,可能不会只是冰冷的工具,而是能和我们握手时控制好力度、递东西时知道轻重的“伙伴”。
触觉,正在成为人机之间新的连接点。
点击充电,成为大圆镜下一个视频选题!