对抗知识焦虑,从看懂这条开始
App 下载
人形机器人半马将破1小时,比人还快
高减速比齿轮|弹性储能|关节执行器|半程马拉松|人形机器人|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载高减速比齿轮|弹性储能|关节执行器|半程马拉松|人形机器人|具身智能|人工智能
当你还在为半马跑进130沾沾自喜时,一群没有心跳的选手正准备把这个成绩远远甩在身后——下个月的北京亦庄,人形机器人将以跑进1小时的成绩完成半程马拉松,速度超过绝大多数人类跑者。这不是科幻电影的预告,而是正在发生的工程突破。我们不禁要问:这些金属身躯,凭什么能在耐力和速度上追上甚至超越人类?
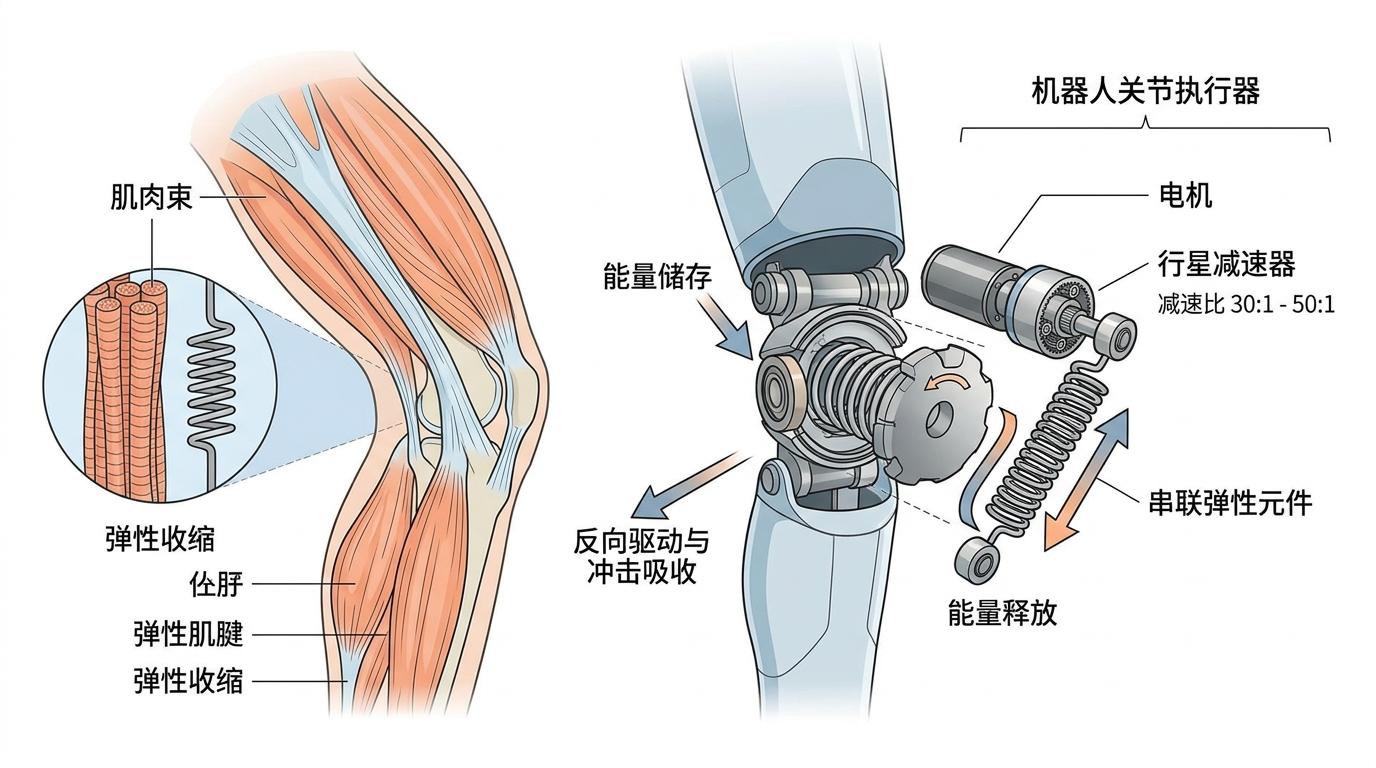
要理解这场速度革命,得先看懂机器人关节里的门道。人类跑步时,肌肉通过弹性收缩储存和释放能量,就像弹簧一样缓冲冲击、推进身体。而人形机器人的关节执行器,正在复刻这种“弹性智慧”——它们放弃了追求极致扭矩的高减速比齿轮,转而在30:1到50:1的“黄金区间”寻找平衡,既保留足够力量,又能像人类肌肉一样被反向驱动,吸收每一步落地时2到3倍体重的冲击。就像给机器人装了看不见的弹簧,既不会跑着跑着齿轮崩断,又能把每一点能量都用在推进上。
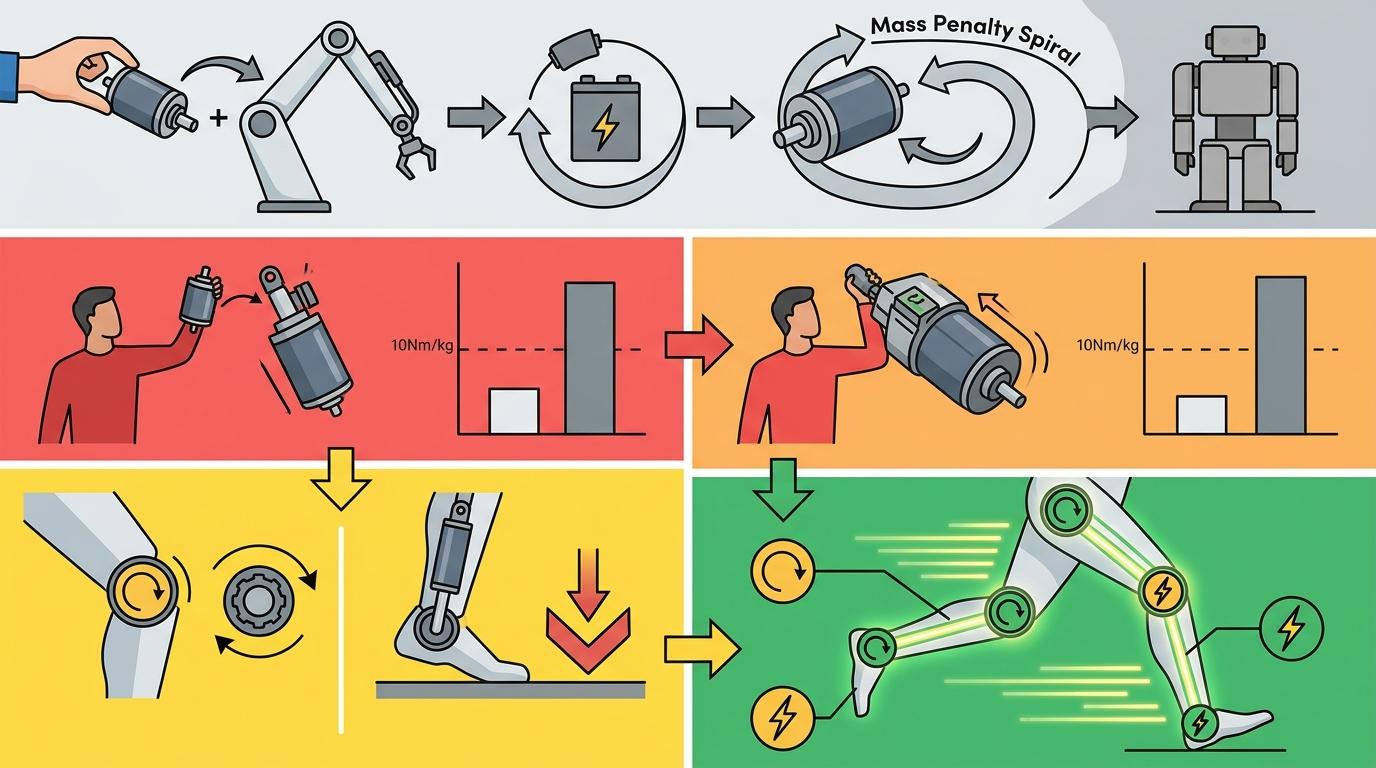
更关键的是,这些执行器正在和“质量惩罚螺旋”死磕。你给机器人加一个更强劲的电机,就需要更重的电池来供电,电池重了又需要更大的电机来驱动,如此循环下去只会让机器人变成笨重的铁疙瘩。现在的解决方案是给关节“分工”:膝关节用旋转执行器保证灵活度,踝关节用线性执行器扛住冲击,再把每个执行器的扭矩密度推到10Nm/kg以上——相当于每公斤重量能输出10牛米的力量,比传统工业机器人高出整整一倍。
但光有强劲的“肌肉”还不够,机器人还得学会像人一样“思考”跑步。过去的机器人跑步靠预设轨迹,就像被编程的木偶,遇到个小石子就可能摔倒。现在的控制算法用上了模型预测控制(MPC),每毫秒都在预测下一步的姿态,调整关节力矩,就像人类大脑在跑步时下意识地保持平衡。更聪明的是,它们还学会了“模仿学习”——盯着人类跑步的视频,在虚拟环境里反复练,把人类的步频、步幅甚至重心起伏都复刻出来,再通过强化学习优化,最后直接迁移到真实世界里。
当我们惊叹于机器人的速度时,更值得关注的是藏在成绩背后的“具身智能”。这些机器人不再是只会执行指令的机器,而是能通过身体感知环境、调整动作的智能体。就像人类跑步时会根据路面状况调整脚的落地方式,机器人也能通过力觉传感器感知地面的软硬,实时改变步态。这种“身体即大脑”的理念,正在让机器人从实验室里的展品,变成能在真实世界里跑起来、走起来、工作起来的“新物种”。
有人担心,机器人跑得比人快了,人类该怎么办?其实大可不必。机器人跑进1小时的半马成绩,不是为了和人类比赛,而是为了证明它们能在真实世界里连续运动21公里——这意味着未来它们能在工厂里搬一天货,在医院里推一天病床,在灾区里搜一天救。当机器人把人类从重复、危险的体力劳动里解放出来,我们才有更多时间去做只有人类能做的事:创造、思考、感受。
从实验室的短跑到半马赛场,人形机器人的每一步,都是向“具身智能”的拐点靠近。或许用不了多久,当你在小区里看到机器人跑步时,不会再觉得新奇——因为它们已经成了我们生活的一部分,用金属的身躯,拓展着人类能力的边界。