对抗知识焦虑,从看懂这条开始
App 下载
工厂里的仿生手,正学会像人一样干活
上海金桥|工业机器人|仿生汗腺|触觉传感器|仿生机械手|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载上海金桥|工业机器人|仿生汗腺|触觉传感器|仿生机械手|具身智能|人工智能
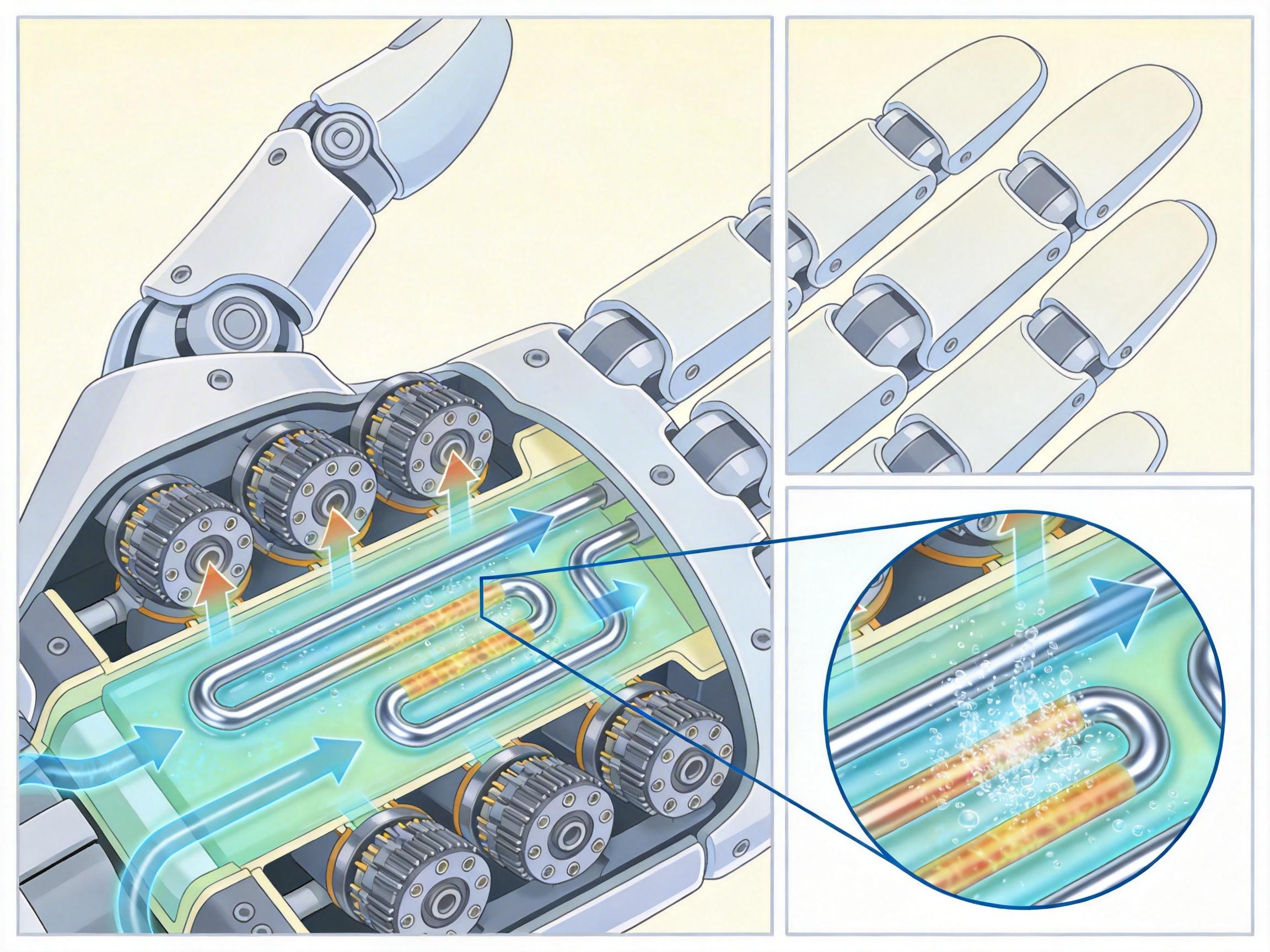
当汽车电池产线的机械臂还在重复固定轨迹时,上海金桥的车间里,一只和人手尺寸分毫不差的机械手,正精准捏起电池极片完成装配——连续三小时作业,成功率稳定在90%以上。它的指尖覆盖着8200平方毫米的触觉传感器,能像人手一样感知压力和纹理,甚至在视觉受阻时也能完成抓取;更关键的是,它内置的「仿生汗腺」正以每分钟0.5毫升的速率蒸发水分,带走10瓦热量,让高密度电机在高负载下不会过热宕机。这不是实验室里的原型机,而是已经能在工厂顶岗的「新员工」。为什么一只手的突破,能让人形机器人真正走进生产线?
要回答这个问题,得先明白工业场景对机器人的苛刻要求:不是动作越灵活越好,而是要在重复、高负载的环境下,保持稳定的精度和寿命。此前多数仿生手的抓握循环寿命仅1万次,连一周的两班倒都撑不过去;而这只手通过优化腱索和弹簧结构,实现了15万次以上的抓握寿命,相当于在生产线连续工作半年无故障。它的体积压缩了60%,实现和人手1:1的尺寸匹配,这背后是AI训练出的精确运动映射——只有和人手同构,才能直接复用人类工人的操作数据,无需重新规划复杂的运动轨迹。
全掌触觉传感器是它能适应工业环境的核心。这层传感器模仿人类皮肤里的四种机械感受器:外层感知轻触和低频振动,中层捕捉形变,内层检测高频压力,甚至能区分物体的纹理和材质。搭配开源的TacRefineNet框架,它能把触觉数据直接转化为动作调整——比如抓取表面光滑的螺母时,会自动增加抓握力,避免打滑;遇到带花键的零件,能通过触觉反馈微调角度,对准定位销。这种纯触觉驱动的姿态微调,精度能达到毫米级,比依赖视觉的传统机器人更适应光线昏暗、零件堆叠的复杂车间。
更值得关注的是「仿生汗腺」解决的散热难题。高密度电机集成在狭小的手部空间里,很容易因局部过热导致性能衰减甚至烧毁。这只手采用3D打印的金属液冷通道,像人类汗腺一样通过蒸发冷却带走热量,让100W的电机能长时间满负荷运行。这看似微小的设计,打破了人形机器人高负载作业的瓶颈——此前多数机器人手连续工作半小时就必须停机散热,现在能支撑整个班次的生产节拍。
当这只手在汽车装配线拧紧螺母时,另一条新能源电池产线上,搭载类似技术的人形机器人已经开始常态化作业。这标志着人形机器人终于跨过了「实验室演示」到「工业实用」的门槛:不再是只能完成单一任务的机械臂,而是能适应复杂、动态工业环境的灵活操作者。但我们也得清醒地看到,它目前还只能完成特定工序的作业,离真正替代人类工人完成多样化任务还有距离——成本依然高昂,传感器的长期耐用性还需在粉尘、油污的车间里验证,多手协同的控制算法也有待优化。
未来的工厂里,机器人不会是人类的竞争对手,而是能接住重复、精细、高负载任务的「同事」。就像这只仿生手所展示的,真正的突破从来不是让机器人变得更像人,而是让机器人能像人一样,踏踏实实地在车间里干活。