对抗知识焦虑,从看懂这条开始
App 下载
机器人跑赢人类后,行业转向大脑竞赛
平衡算法|关节电机|AI模型研发|半程马拉松纪录|人形机器人|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载平衡算法|关节电机|AI模型研发|半程马拉松纪录|人形机器人|具身智能|人工智能
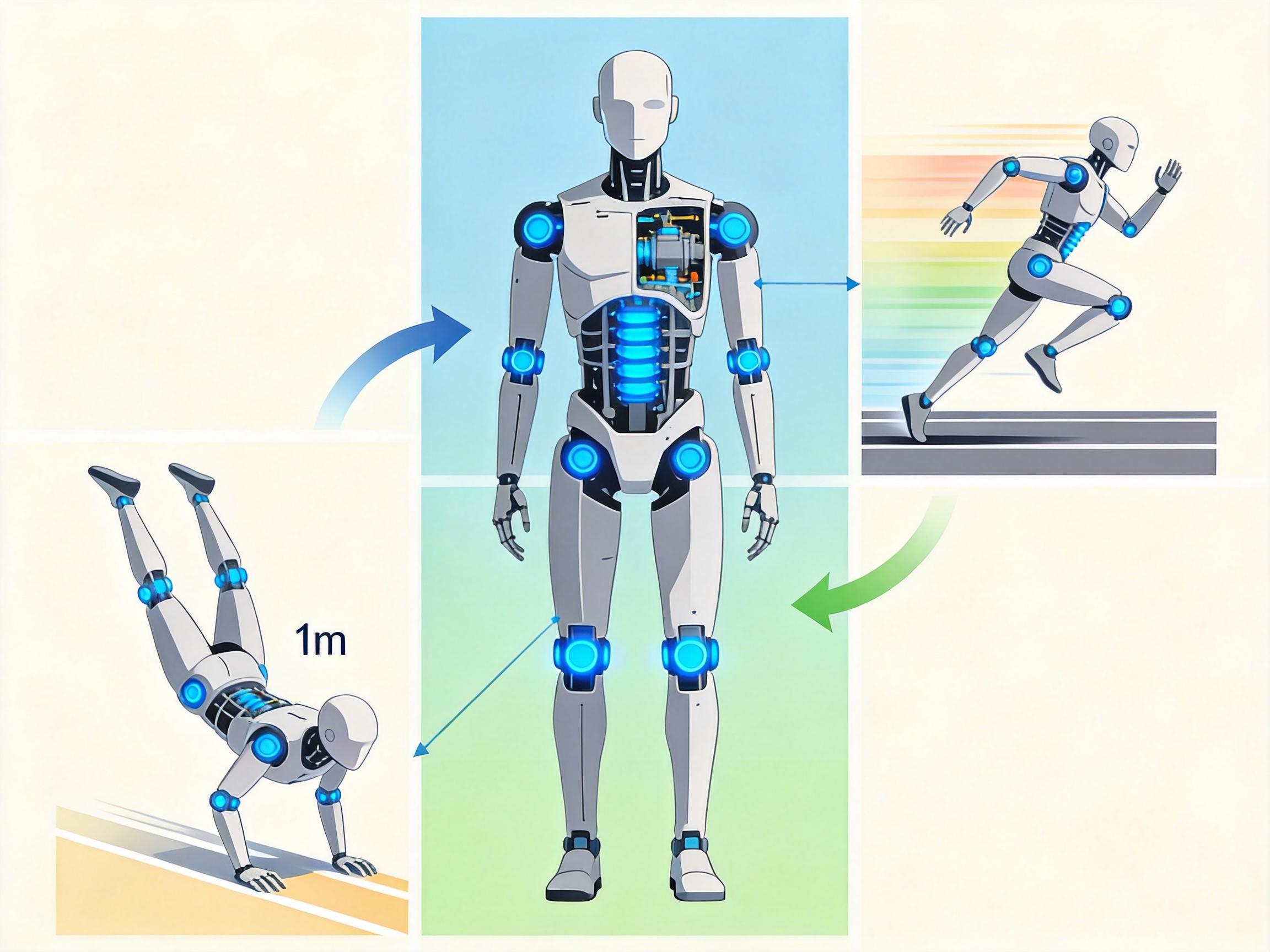
2026年北京亦庄的赛道上,一台人形机器人用50分26秒跑完半程马拉松——比人类男子世界纪录快了近7分钟。另一台机器人在1.9公里弯道跑出的速度,折算后打破了人类1500米纪录。当观众为机器的体能惊叹时,行业里的人却在盯着另一个数字:2026年前三个月,具身智能领域融资超300亿元,其中近七成流向了AI模型研发团队。这不是一场关于跑步的比赛,而是一场关于「智能到底是什么」的路线之争——当机器的身体已经能超越人类,我们该给它装怎样的大脑?
过去十年,国内一批机器人企业把全部精力放在「练身体」上:自研关节电机、优化平衡算法、让机器人跑得更快跳得更高。其中一家企业的人形机器人能完成3米高的空翻,每秒冲刺速度达3.3米,一度被认为建立了不可逾越的硬件护城河。
但2026年的马拉松赛打破了这个神话:一家依托成熟供应链的企业,只用了不到一年时间就造出了速度更快的机器人。当核心零部件的供应链逐渐标准化,硬件优势的壁垒正在快速消解——就像当手机供应链成熟后,新品牌也能做出性能接近旗舰的机型。
更关键的是,这些「四肢发达」的机器人,大多还停留在跳舞、跑酷的表演阶段。它们能精准完成预设动作,却无法理解「把桌子上的蓝色杯子递给我」这样的指令,更别说在复杂的工厂环境里完成柔性装配任务。一位深耕硬件十年的创始人坦言:「现在机器人的硬件能力已经够用了,但大脑还没学会思考。」
具身大模型——简单说就是让AI通过「身体」感知世界的智能系统,正在成为行业新的核心。它和普通AI的区别在于:普通AI是「离线」学知识,具身大模型是「在线」练本事——它能通过视觉、触觉、动作的多模态输入,在真实环境里边做边学。
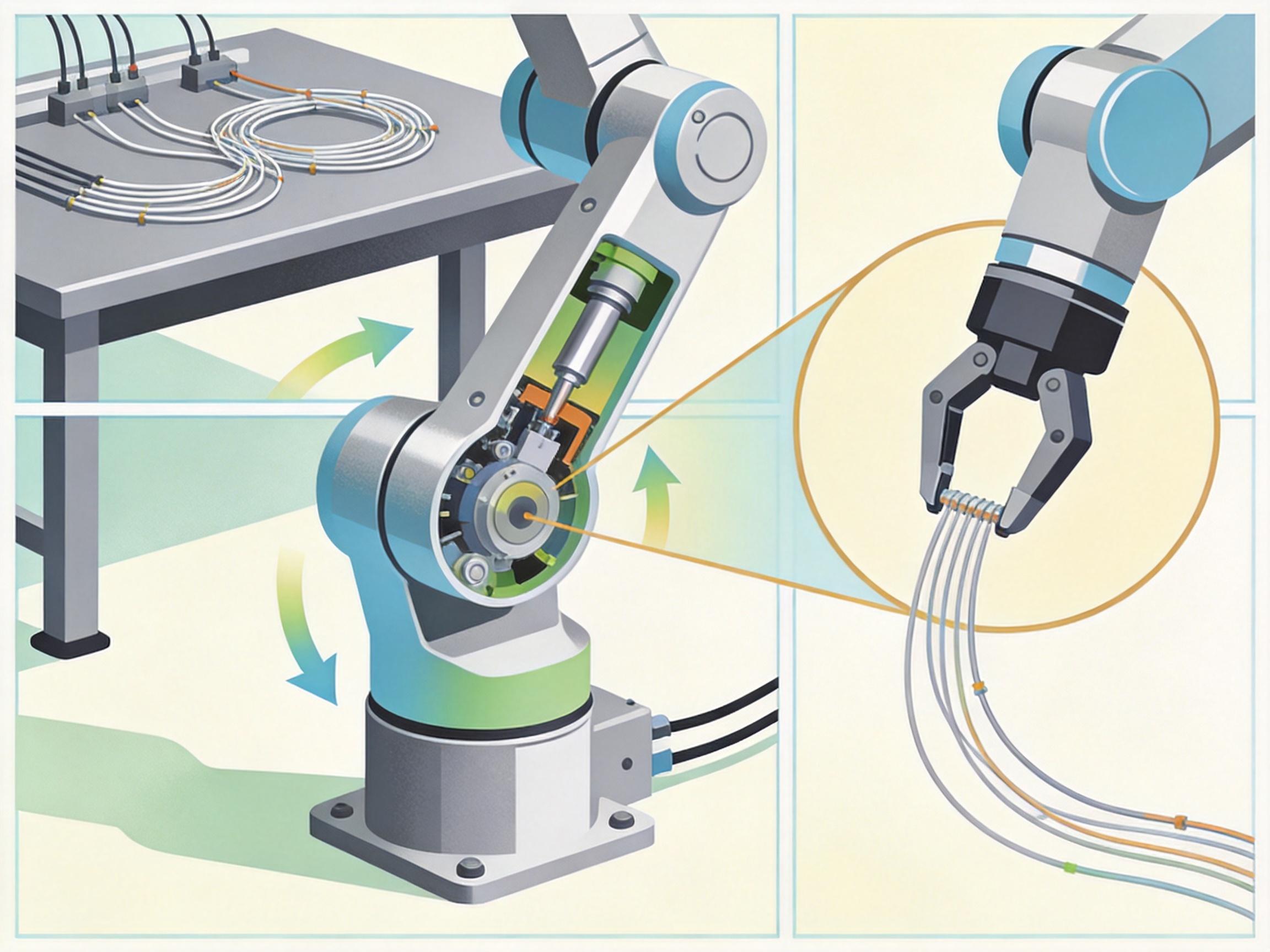
你可以把它想象成一个刚学做家务的孩子:一开始需要人一步步教,但做多了就能自己总结规律——比如知道玻璃杯要轻拿轻放,知道怎么把软线精准插进接口。而真实的技术逻辑更复杂:它需要先构建一个「世界模型」,理解物理世界的规则,再根据任务生成连贯的动作指令。
国内一家模型研发团队,用这套思路在工业场景里取得了突破:他们的机器人能在1小时内完成105次亚毫米精度的柔性线束装配,这在过去是人类熟练工才能完成的任务。更重要的是,这个模型能快速适应不同场景——换一种线束、换一个工作台,它不需要重新编程,只需要少量示范就能学会。
现在行业里常把硬件路线和模型路线对立起来,但真正的答案可能藏在「协同」里。
硬件路线的优势在于对物理世界的执行精度——比如能稳定完成高速跑跳的机器人,它的关节控制算法已经非常成熟。但如果没有智能模型的加持,这些能力只能停留在表演层面。模型路线的优势在于认知和决策,但如果没有合适的硬件载体,再聪明的大脑也无法落地。
目前的挑战在于,两者的融合还存在不少技术门槛:比如模型的推理速度要跟上机器人的动作速度,比如触觉传感器的数据要能实时反馈给模型调整动作。还有数据的问题——训练具身大模型需要大量真实环境下的交互数据,而这些数据恰恰是硬件企业手里最宝贵的资源。
更现实的问题是成本:训练一个能干活的具身大模型,需要的计算资源是普通大语言模型的数倍;而造一个能精准执行指令的机器人,成本也远高于工业机械臂。这意味着,只有能同时打通硬件、数据和模型的团队,才能最先跑通从技术到商业化的闭环。
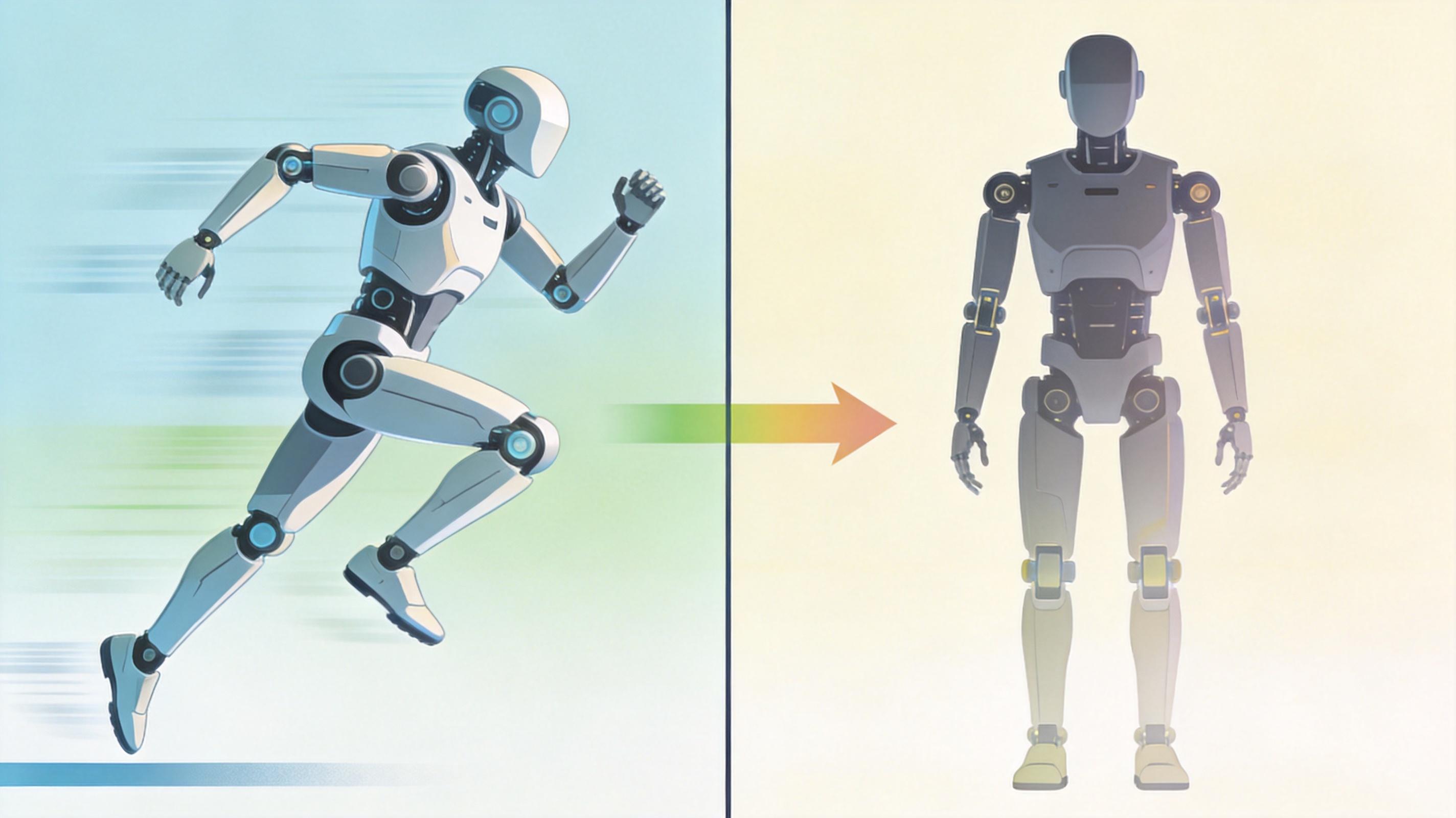
当机器人跑赢人类马拉松的那一刻,很多人以为我们已经站在了机器人时代的门槛上。但现在看来,那只是「身体竞赛」的终点,也是「大脑竞赛」的起点。
未来的机器人,不会是单纯的「跑得快的机器」,也不会是单纯的「会思考的程序」,而是能在真实世界里感知、思考、行动的「智能体」——它可能不是人形的,可能是工厂里的机械臂,可能是家里的清洁机器人,也可能是医院里的护理助手。
身体的极限可以用数据衡量,但智能的边界,才是我们真正要探索的未知。身体是基础,大脑才是未来。