对抗知识焦虑,从看懂这条开始
App 下载
特斯拉要推无监督FSD,难点不在技术
加州许可|德州监管|无监督FSD|Robotaxi|特斯拉|自动驾驶|公共政策|社会人文|人工智能
对抗知识焦虑,从看懂这条开始
App 下载加州许可|德州监管|无监督FSD|Robotaxi|特斯拉|自动驾驶|公共政策|社会人文|人工智能
当你在奥斯汀街头招手拦到一辆没有司机的Model Y,车舱里只有你和一台正在播放路况的显示屏——这不是科幻片,是2026年正在发生的事。该团队宣布年底前要把这种无安全员的Robotaxi铺到美国十几个州,同时推出无需人类接管的无监督FSD。但问题是,他们在加州连无监督测试的许可都没拿到,凭什么敢夸下海口?
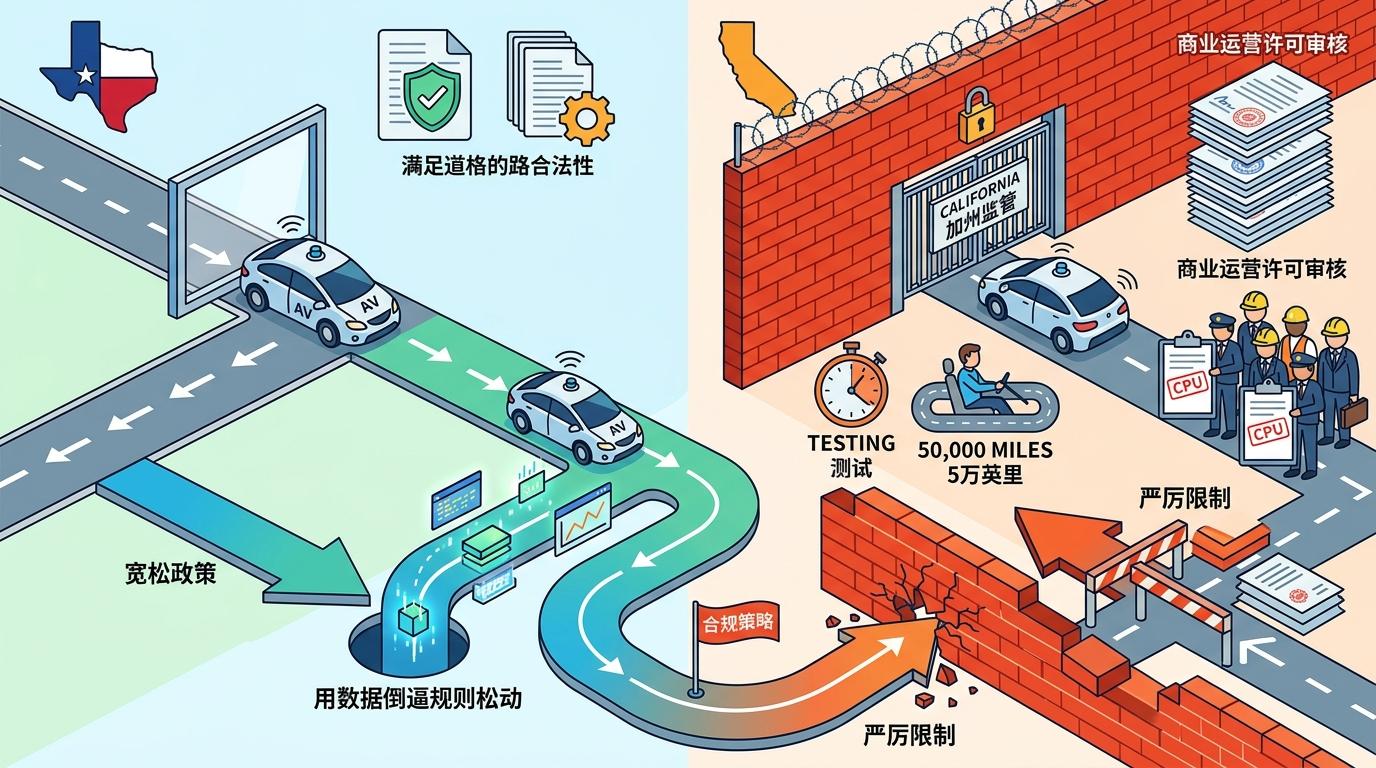
答案藏在不同州的监管缝隙里。德州的规则像开了一扇窗:只要满足保险和备案要求,无方向盘的无人车也能上路;而加州的门却焊得严实,要拿商业运营许可,得先跑完5万英里带安全员的测试,还要过公共事业委员会的层层审核。该团队索性绕开加州的高墙,先在监管宽松的州跑通模式,用实际运营数据反过来倒逼规则松动。这不是技术赛跑,是一场合规策略的迂回战。
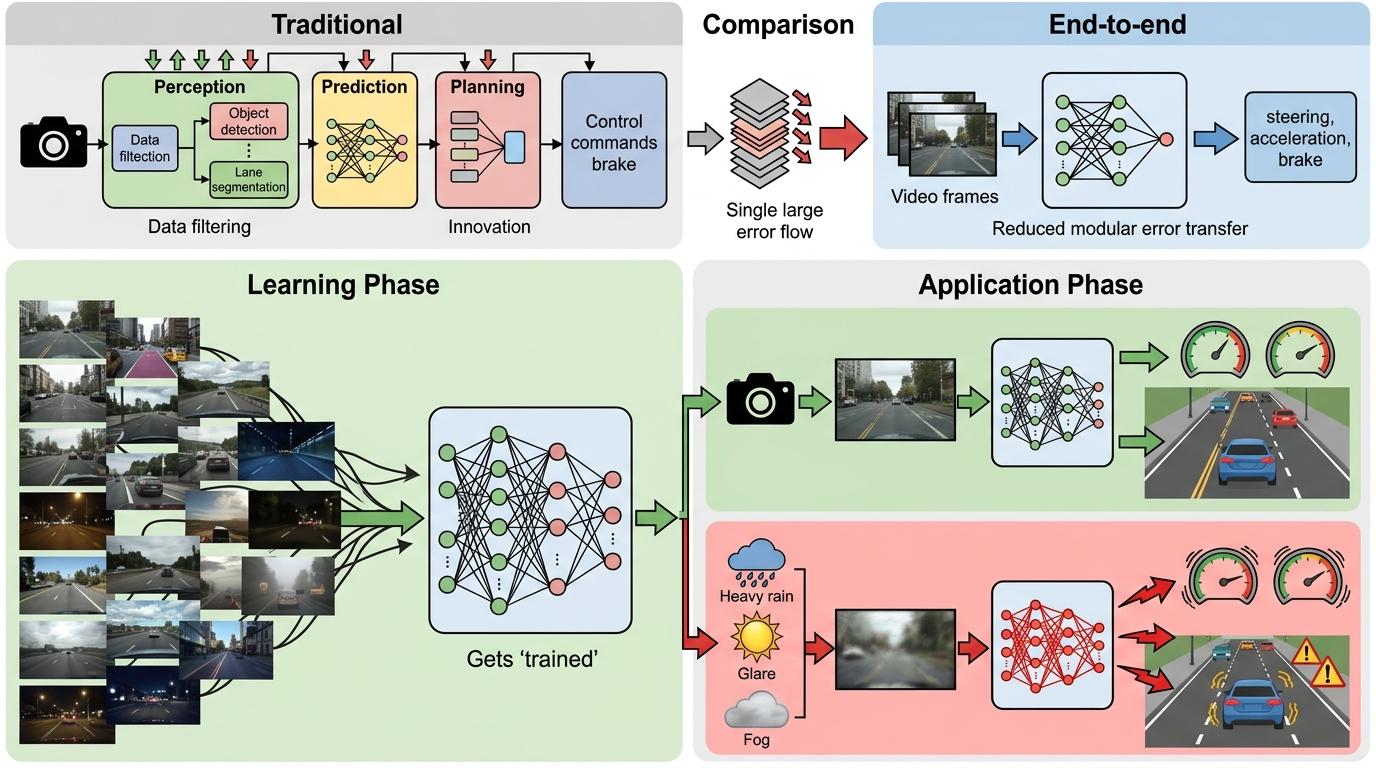
真正的技术核心,是他们赌上全部的纯视觉端到端模型。你可以把它想象成一个学开车的新手:不是先背交规、学认路标,而是直接看一千万小时人类开车的视频,学着判断什么时候踩油门、什么时候转弯——这就是端到端学习,跳过了传统自动驾驶拆分成感知、预测、规划的繁琐步骤。用官方的话说,就是从摄像头原始数据直接输出控制指令,减少了模块间的误差传递。但这也意味着,一旦摄像头被雨雾糊住、被阳光晃花,整个系统就可能失焦——这是纯视觉路线天生的阿喀琉斯之踵。
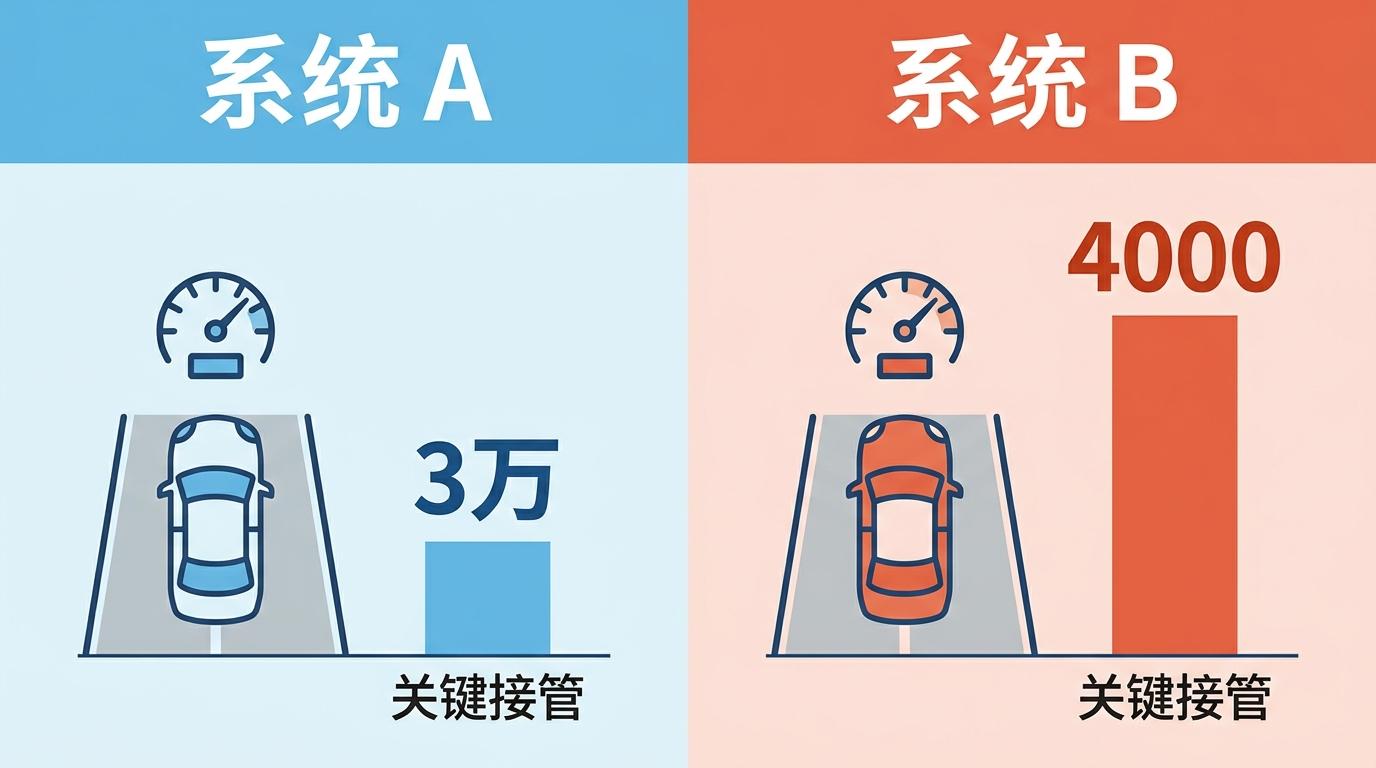
更值得警惕的,是被媒体忽略的安全盲区。该团队声称FSD的事故率是人类的1/7,但这个数据只统计了系统激活时的情况,没算上人类驾驶员紧急接管的次数。Waymo在凤凰城的无人车,每3万英里才需要一次关键接管;而该团队的最新数据,是每4000英里就有一次——这中间的差距,就是从「辅助驾驶」到「真正无人」的鸿沟。
当Robotaxi的车轮碾过奥斯汀的柏油路,我们谈论的从来不是「车能不能自己开」,而是「谁来为失控的风险买单」。监管的灰色地带、数据的模糊边界、公众的信任缺口,每一个都比技术难题更难跨越。

自动驾驶的未来,从来不是车的胜利,是规则的胜利。