对抗知识焦虑,从看懂这条开始
App 下载
机器人跑赢人类半马后,真正的门槛才浮现
传感器系统|数据合规|智能汽车基础设施|半程马拉松|Lightning机器人|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载传感器系统|数据合规|智能汽车基础设施|半程马拉松|Lightning机器人|具身智能|人工智能
2026年北京的春日,一场半程马拉松刷爆了科技圈——不是人类选手打破纪录,而是一台叫“Lightning”的机器人,用50分26秒跑完21.1公里,把人类世界纪录甩在了身后。观众的欢呼里藏着一个共识:机器人终于能像人一样“跑”了。但很少有人注意到,这台机器人脚下踩着的,不是凭空出现的黑科技,而是一套从智能汽车行业平移过来的“基础设施”——它能精准识别每一寸赛道,能在奔跑时自动过滤掉不该采集的敏感数据。当机器人开始突破物理极限,真正决定它们能不能走进工厂、家庭的,早已不是跑得多快。
你可以把机器人想象成一个带着全身上下传感器的“好奇宝宝”——摄像头看环境、麦克风听声音、力觉传感器摸物体,一旦走进家庭,它能记录你什么时候起床、喜欢坐沙发哪个位置;进了工厂,流水线的工艺细节、原材料堆放位置全在它的“视线”里。这些数据是机器人学习的养料,却也是悬在行业头顶的达摩克利斯之剑。
有团队做过测算,一台家用机器人每天产生的数据量,相当于10部智能手机的总和。如果这些数据不加筛选地传回云端,不仅用户隐私会暴露,工厂的商业机密也可能泄露。这时候,一套像“数据阀门”的合规系统就成了刚需:它会在机器人本地先过滤一遍数据,只把和技术迭代、安全维护相关的信息传回去,比如“关节温度过高”“路径出现新障碍”,而那些能识别出你身份的面部特征、工厂的核心设备参数,会直接在本地被销毁。
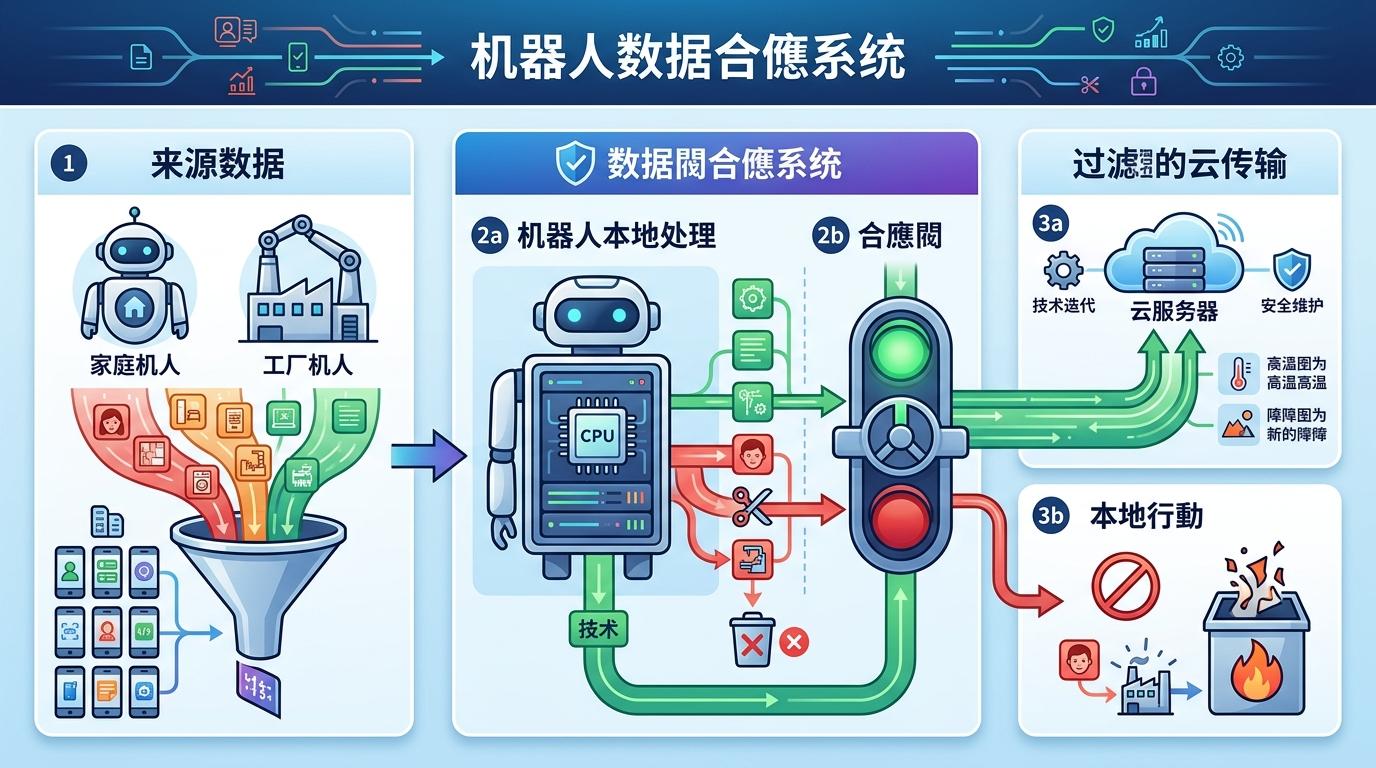
更关键的是,这种合规不是事后补救,而是从设计阶段就嵌入机器人的“基因”里。就像智能汽车必须通过碰撞测试才能上路,未来机器人也得先过“数据合规测试”,才能真正走进现实场景。
跑赢半马的机器人,靠的不只是强劲的关节电机,更重要的是它能“看见”赛道的每一个细节——哪里有坡度、哪里有转弯、补给点在什么位置。这种能力叫空间感知,说白了就是机器人的“导航系统”,但比手机导航要精密得多:手机导航误差几米没关系,机器人差几厘米可能就会撞到墙、摔下楼梯。
传统的机器人导航靠的是“走一步记一步”的SLAM技术,但这种方法在陌生环境里很容易“迷路”。现在的解决方案,是把智能汽车用的高精度空间数据平移过来——提前用激光雷达、摄像头把现实场景扫描一遍,构建出包含三维结构、语义信息的数字地图,机器人走到哪里,都能像查字典一样快速定位自己的位置。
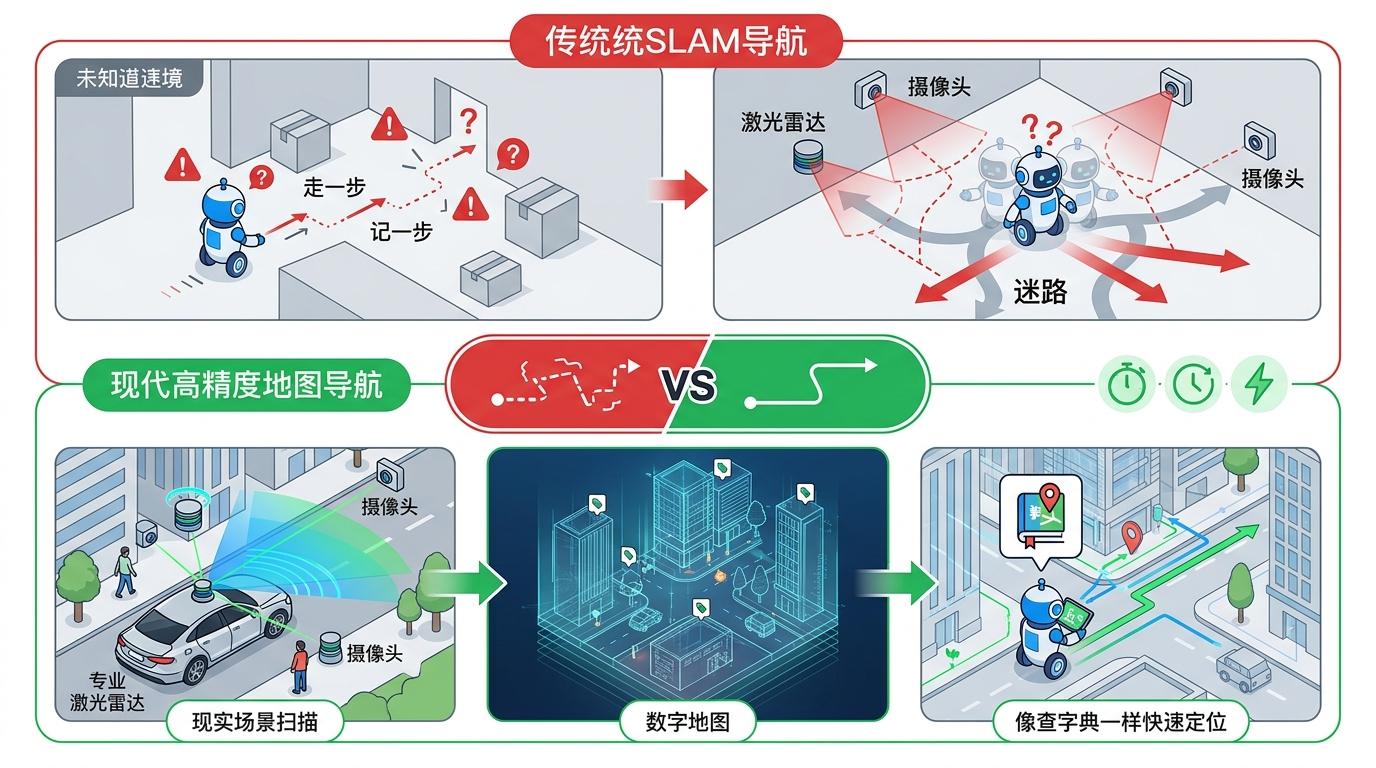
有意思的是,这种空间感知能力还能跨场景迁移。比如给配送机器人用的城市地图,稍微调整参数就能用到工厂里的搬运机器人身上,不用再重新扫描整个厂区。这就像你换了个城市,不用重新学走路,打开导航就能找到目的地。但目前这种技术还局限在预先扫描过的环境里,一旦到了完全陌生的野外,机器人还是会“抓瞎”——这也是空间感知技术接下来要突破的瓶颈。
很多人好奇,为什么是做智能汽车的团队先摸到了机器人的命脉?答案藏在行业的发展节奏里:2019年的自动驾驶行业,就像现在的机器人行业——技术流派百花齐放,大家都在拼算法、拼硬件。但最终跑出来的玩家,靠的不只是技术,还有数据合规、空间感知这些看不见的基础设施。
有团队算过一笔账,智能汽车行业每年产生的空间数据,相当于把整个地球重新扫描了3遍;而数据合规体系,更是经过了百万级用户、千万公里行驶里程的验证。把这些能力平移到机器人身上,相当于让机器人站在了智能汽车的肩膀上——不用再从零开始搭建数据采集、合规的体系,直接就能用成熟的方案解决最棘手的问题。
当然,机器人和汽车也有本质区别:汽车是在预设的道路上跑,机器人却要在复杂的室内、野外环境里“折腾”;汽车的形态是固定的,机器人却有轮式、人形、四足等各种形态。这意味着,智能汽车的经验不能直接照搬,得根据机器人的需求重新调整——比如把汽车用的厘米级定位,升级到机器人需要的毫米级定位;把针对道路的合规系统,改成针对家庭、工厂的场景化合规方案。
当机器人跑赢人类半马时,我们惊叹的是技术的突破,但更值得深思的是,那些支撑技术落地的“基础设施”,才是决定机器人产业能走多远的关键。就像互联网时代的宽带、移动支付,没有这些看不见的底层系统,再炫的应用也只能停留在实验室里。
未来十年,机器人不会只用来跑马拉松,它们会出现在工厂的流水线旁、医院的病房里、家庭的客厅中。而那时的我们,不会再为机器人能跑多快而惊讶,只会习以为常地享受它们带来的便利——前提是,我们已经为它们搭好了合规、安全的“生存环境”。
技术的突破在台前,产业的基石在幕后。