对抗知识焦虑,从看懂这条开始
App 下载
智能驾驶只是起点,物理AI才是终局
跨场景成本分摊|智能驾驶汽车|物理AI基础模型|沈劭劼|卓驭科技|AI智能体|人工智能
对抗知识焦虑,从看懂这条开始
App 下载跨场景成本分摊|智能驾驶汽车|物理AI基础模型|沈劭劼|卓驭科技|AI智能体|人工智能
你有没有想过,现在马路上那些能自动跟车、避障的智能驾驶汽车,其实只是AI踏入物理世界的“学步车”?2026年4月,卓驭科技CEO沈劭劼在一场行业论坛上抛出了一个让所有人重新思考的判断:智能驾驶绝非AI与汽车结合的终点,它只是物理AI的最初形态。而接下来两年,整个智能驾驶行业将告别各自为战的分垂类模式,迈向基础模型大一统的时代。这背后不是什么远大的技术理想,而是一笔冰冷的成本账——训练一个物理AI基础模型,年成本高达数十亿元,企业要活下去,就必须跨场景、跨领域分摊成本。
先给物理AI一个“厨房级别”的定义:它是能在真实物理世界里“看、想、做”的AI——不像ChatGPT只在数字世界生成文字,物理AI要像人一样,用传感器“看”环境,用模型“想”对策,再通过机械结构“做”出动作,比如开车、搬货、甚至给你递一杯水。智能驾驶就是最典型的物理AI:汽车用摄像头、雷达感知路况,用AI模型判断该加速还是刹车,最后通过方向盘、油门执行动作。
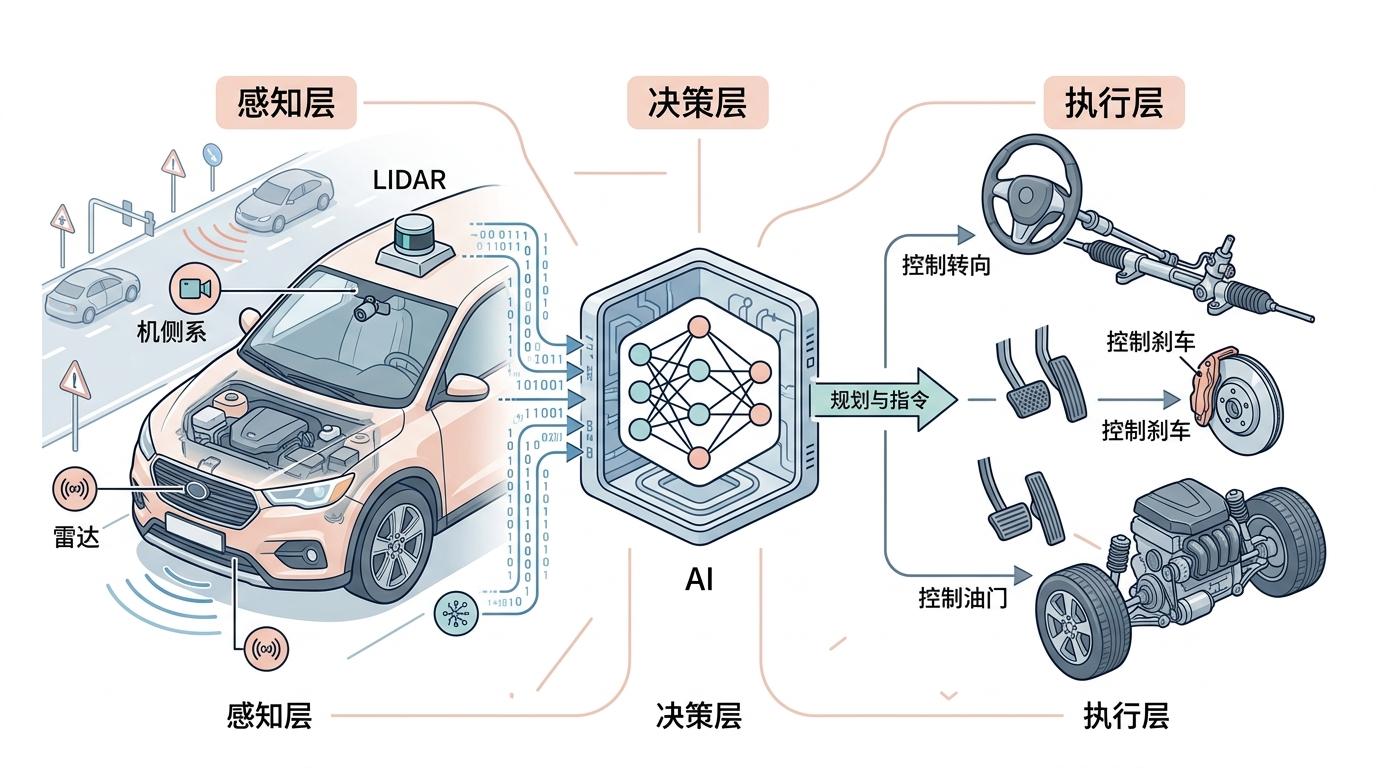
但真实的物理AI比这复杂得多。它需要融合视觉、语言、动作控制等多模态数据,还要严格遵守物理规律——比如不能让汽车做出违反力学原理的漂移,不能让机器人抓起杯子时用超过玻璃承受力的力气。为了让模型学会这些,研究者会用高保真仿真环境反复训练,比如在虚拟城市里模拟1000次暴雨天的超车场景,再把学到的能力迁移到真实世界。
更关键的是,物理AI不是为单一场景设计的。一个成熟的物理AI基础模型,既能给汽车当“大脑”,也能给物流机器人当“指挥中心”,甚至能控制工厂里的机械臂。这种跨场景的通用性,正是分摊数十亿元训练成本的核心——就像一款游戏引擎,既可以做赛车游戏,也可以做角色扮演游戏,开发成本被多款产品分摊,才能实现盈利。
过去几年,智能驾驶行业一直是“分垂类作战”:有的团队专攻高速公路场景,有的只做城市通勤,还有的盯着物流货运。每个团队都要训练自己的模型,采集自己的数据,成本居高不下,而且模型只能在特定场景下工作——比如在高速上表现完美的系统,到了胡同纵横的老城区可能就“失灵”了。
沈劭劼说的“基础模型大一统”,就是要打破这种壁垒:用一个通用的物理AI基础模型,适配从乘用车到商用车、从城市道路到工厂园区的所有场景。这不是技术上的炫技,而是生存必需。
实现大一统的关键,是多场景数据的反哺。比如,物流车在港口采集的集装箱识别数据,可以用来优化模型对大型障碍物的判断;乘用车在城市里采集的行人避让数据,能帮助工厂机器人更好地和人类协作。这种数据的循环流动,能让模型在不同场景下持续进化,同时每增加一个新场景,分摊的成本就多一份,企业的生存空间也就更大。
当然,这条路也布满挑战。首先是数据的跨场景适配:港口的集装箱和城市里的快递车,物理特征完全不同,模型要学会快速识别;其次是实时性要求:汽车的决策延迟不能超过100毫秒,而基础模型的推理往往需要更多计算资源,必须做轻量化优化;还有安全问题:一个跨场景的模型,一旦在某个场景出了故障,可能会影响所有应用它的领域。
很多人觉得,跨垂类应用只是为了分摊成本,但更值得关注的是,它正在重新定义AI与物理世界的关系。
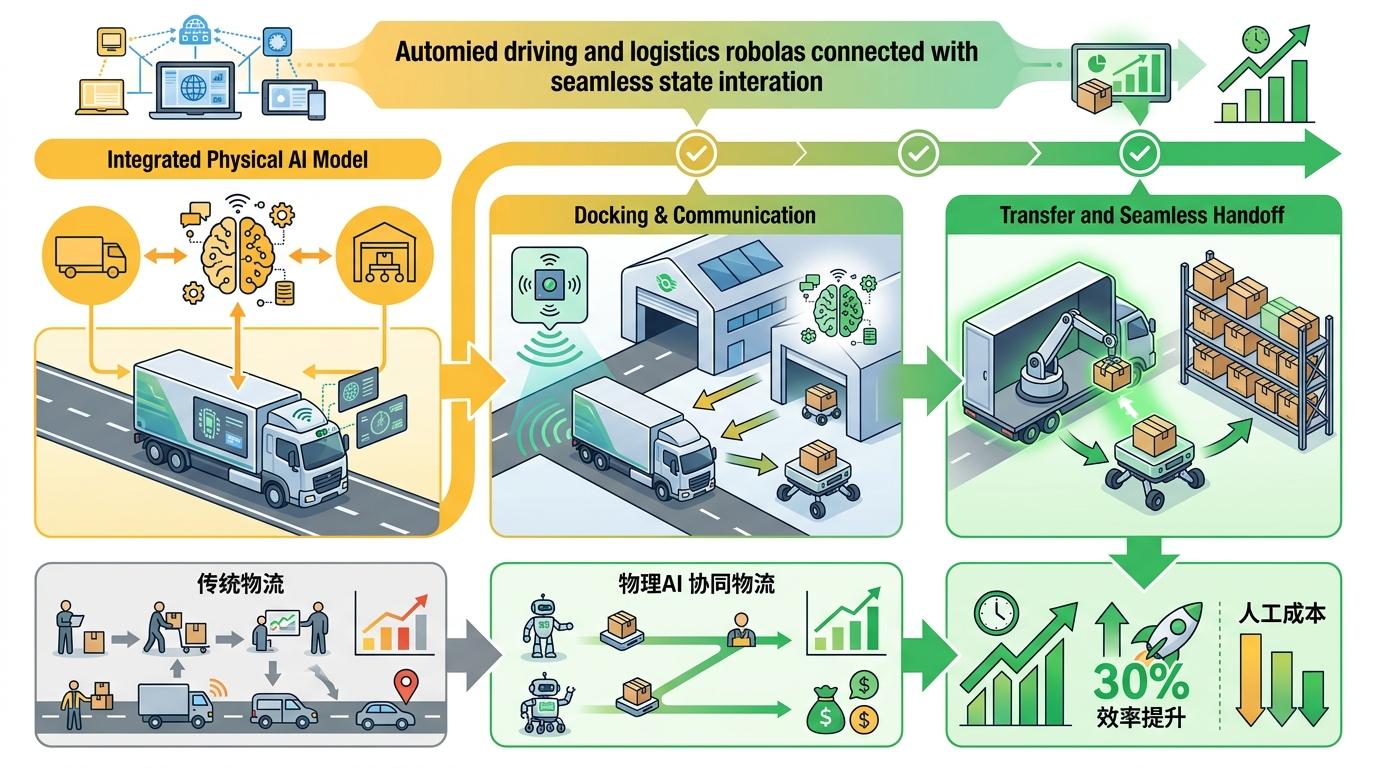
比如,当物理AI基础模型同时掌握了驾驶和物流机器人的控制能力,它就能实现“车-仓”的无缝对接:自动驾驶货车把货物送到仓库门口,物流机器人自动出来接货,全程不需要人类干预。这种跨领域的协同,不是简单的功能叠加,而是1+1>2的价值创造——它能把物流的效率提升30%以上,同时降低人工成本。
还有一个容易被忽略的点:跨场景数据能让模型更“聪明”。单一场景的数据往往有局限性,比如在北方训练的模型,可能对南方的暴雨天气缺乏应对经验,但如果融合了南方车辆的数据,模型就能快速适应新环境。这种泛化能力,是单一垂类模型永远无法具备的。
但我们也要清醒地看到,目前的物理AI基础模型还远未成熟。比如,它在处理极端场景时仍然容易出错,在复杂的人机交互中还不够灵活,而且训练和部署的成本依然高得让很多中小企业望而却步。这不是一条一蹴而就的路,而是需要整个行业共同探索的长期工程。
当我们谈论智能驾驶的未来时,我们其实在谈论AI如何真正走进物理世界——不是作为一个孤立的工具,而是作为一个能适应各种场景、和人类协同工作的智能体。物理AI基础模型的大一统,不是技术的终点,而是一个新的起点:它将让AI从汽车的“大脑”,变成整个物流体系、整个工厂、甚至整个城市的“神经中枢”。
更值得记住的是,技术的进步从来不是为了炫技,而是为了让企业活下去,让生活更高效。物理AI的时代,不是谁颠覆谁的时代,而是谁能更好地融合、更好地协同的时代。物理AI,让智能不止于计算,更在于行动。