对抗知识焦虑,从看懂这条开始
App 下载
用老算法驯服AI,无人机实时建图快准稳
地震灾区救援|无人机实时建图|光束法平差|德国宇航中心|ZeD-MAP|航空航天工程|AI产业应用|前沿科技|人工智能
对抗知识焦虑,从看懂这条开始
App 下载地震灾区救援|无人机实时建图|光束法平差|德国宇航中心|ZeD-MAP|航空航天工程|AI产业应用|前沿科技|人工智能
2026年春的地震灾区,救援队盯着无人机传回的画面攥紧了拳头:传统测绘要等半小时才能出精确3D图,AI模型虽快却把3米宽的路修成了5米——尺度混乱的地图,比没有地图更危险。就在这时,德国宇航中心的团队抛出了ZeD-MAP:他们用诞生于1950年代的老算法,给天马行空的AI套上了“缰绳”,让无人机在飞完的瞬间,就能拿出误差不到1米的实时3D地图。这不是简单的技术拼接,而是给“鱼与熊掌不可兼得”的行业难题,找到了第三条路。
光束法平差(BA),这个在摄影测量界服役了70年的“老古董”,本质就是个“找茬专家”——它会盯着无人机拍的多张照片,反复比对同一个点在不同画面里的位置,一点点修正相机的飞行姿态和点的真实3D坐标,直到所有点都严丝合缝。过去它因为太“较真”,处理一张5000万像素的照片要花几分钟,根本赶不上实时需求。
但ZeD-MAP的研究者给它做了个“减法手术”:不再让它处理所有照片,而是把连续的无人机照片分成小簇,每簇只挑中间和前后两张图来计算。这一下,计算量砍到了原来的十分之一,却能精准算出一批稀疏的“锚点”——这些点的3D坐标精确到厘米级,就像地图上的界碑,死死钉住了真实世界的尺度。
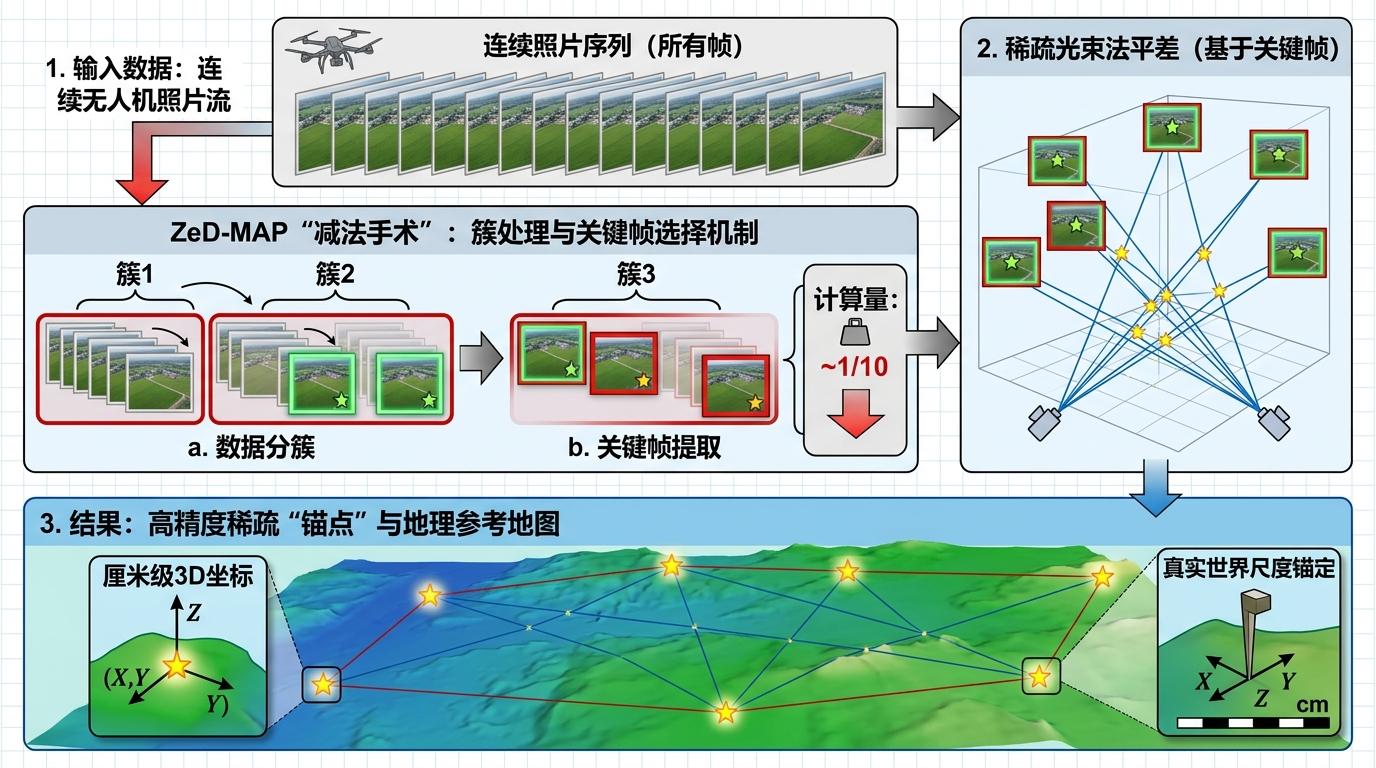
你可以把它想象成装修时先钉好的龙骨:AI负责填满墙面,但龙骨的位置、间距、高度,全由BA说了算。
拿到BA给的“龙骨”,扩散模型这个“AI画师”终于不用瞎画了。过去它生成的深度图,就像没有比例尺的手绘地图——看着像那么回事,实际尺寸全凭感觉,连续两张图里的同一栋楼,一会儿高30米一会儿高50米,拼起来的3D地图全是裂缝。
现在,ZeD-MAP把BA算出的锚点投影到照片上,相当于给AI递了张标好精确尺寸的草稿:“这里的地面离镜头52.3米,那栋楼的屋顶是78.1米,剩下的你自己填,但必须跟着这些点的尺度来。”
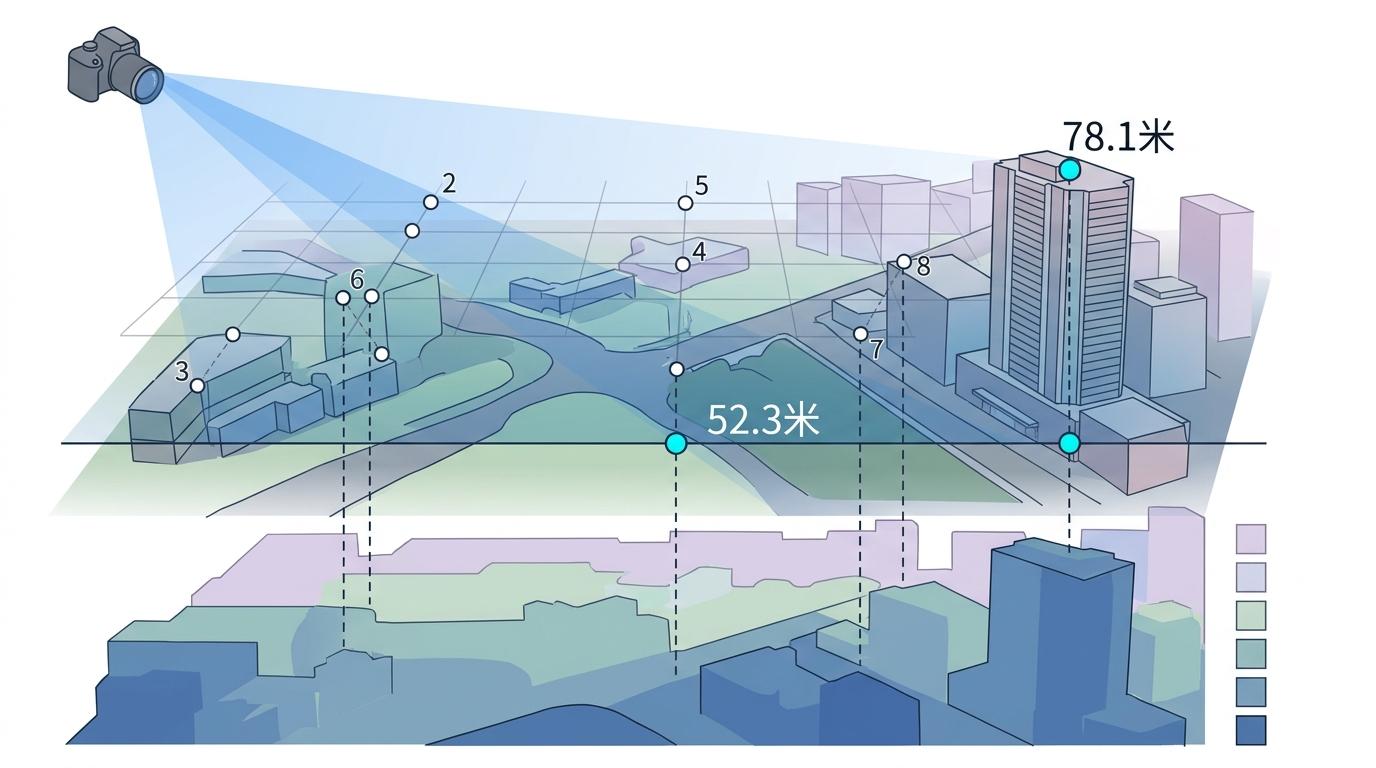
扩散模型的优势在于它能“脑补”细节——哪怕照片里被树挡住的墙角,它也能根据周围环境猜出深度。但过去的“脑补”全凭经验,现在有了BA的锚点约束,它的每一笔都落在了真实的尺度框架里。实验数据显示,ZeD-MAP生成的深度图,水平误差只有0.87米,垂直误差0.12米,和离线处理的“金标准”COLMAP几乎没差,但速度快了整整30倍。
ZeD-MAP的厉害之处,不在于它发明了什么新技术,而在于它打破了“传统算法过时、AI万能”的刻板印象。它证明了:最先进的AI,也需要最扎实的传统技术做底座;而老掉牙的算法,换个场景就能焕发新生。
当然它也有软肋:如果飞到没有纹理的沙漠,或者遇到剧烈晃动的画面,BA可能找不到足够的锚点,AI就会再次“失控”。而且扩散模型目前还得靠GPU跑,没法直接装在小型无人机上。但这些问题,已经有了明确的解决方向——比如给BA加上线特征识别,让它在弱纹理环境也能干活;或者用模型蒸馏技术,把扩散模型“压缩”到手机芯片都能跑的大小。
更重要的是,ZeD-MAP的思路给整个行业开了个好头:与其在“纯AI”和“纯传统”的赛道上死磕,不如想想怎么让它们搭伙干活。
当无人机在灾区上空掠过,屏幕上实时跳出精确的3D废墟地图时,没人会关心这张图是老算法算的还是AI画的——大家只会记住,它让救援队多了一分钟时间,多救了一个人。
这就是技术的终极意义:不是追求最酷的概念,而是解决最实在的问题。ZeD-MAP用“老算法+AI”的组合,给实时三维重建打开了一扇门,也让我们看到:所谓的技术革命,往往不是推翻重来,而是把合适的东西,用在合适的地方。
老规矩定边界,新工具填细节。