
2 个月前
2 个月前
一个代码审计师,一个视觉设计师,一个合规专家,他们被要求合作完成一个复杂的软件项目。规则是:他们不能交谈,不能共享屏幕,甚至不能在同一个房间。他们唯一的协作方式,是把代码片段、图片压缩包和PDF文件打包,通过快递员来回传递。
审计师收到的代码脱离了版本历史和构建环境,无法进行完整的静态分析。设计师拿到的图片是一堆扁平文件,失去了原始的目录结构。每一次微小的修改,都意味着重新打包、传输、解压、执行的漫长循环。这场合作注定是低效、易错、令人崩溃的。
这听起来荒谬,但这正是过去几年里AI智能体(Agent)协作的真实写照。当数以百万计的专家智能体涌现,它们强大、专注,却被困在各自的信息孤岛中,通过“消息传递”进行着隔墙喊话式的低效协作。直到近日,上海创智学院的研究团队撕掉了这面墙,他们开源的**AWCP(智能体工作区协作协议)**,让AI智能体们第一次能“坐到同一张办公桌前共事”。
自2025年AI Agent迎来爆发式增长后,一场关于协作基础设施的竞赛就已全面打响。行业巨头们纷纷布局,试图为未来的“智能体互联网”制定规则:
工具层有了,任务层有了,网络层也有了,但一个致命的短板始终悬而未决:工作区层(Workspace Layer)的缺失。没有任何一个协议,能解决“智能体如何在同一个文件系统里协作”这个根本问题。其代价是巨大的“上下文鸿沟”:每次协作都需要高昂的环境重建成本,状态同步极易出错,不同智能体的工具链互不兼容,迭代效率极其低下。
AWCP的出现,正是在这幅宏大的协议拼图上,补上了这关键的一块。它的核心思想简单而深刻:把协作的媒介,从“消息”下沉到“工作区”。
AWCP的理念借鉴了Unix系统“万物皆文件”的经典哲学,提出了**“文件即接口”(Files-as-Interface)**的协作范式。这并非凭空想象,而是对智能体工作本质的洞察:无论是编码、分析图片还是审阅文档,文件系统始终是智能体与计算环境交互的原生媒介。
让我们回到那个经典的React项目重构场景。在过去,你让一个AI助手帮你修改代码,它最多只能把修改后的代码片段贴给你,或者生成一份操作指南,告诉你需要修改5个组件、更新2个配置文件、然后运行一堆命令。它无法直接上手操作,因为它根本接触不到你的项目文件。
AWCP的答案则简单粗暴:直接让它接触到。
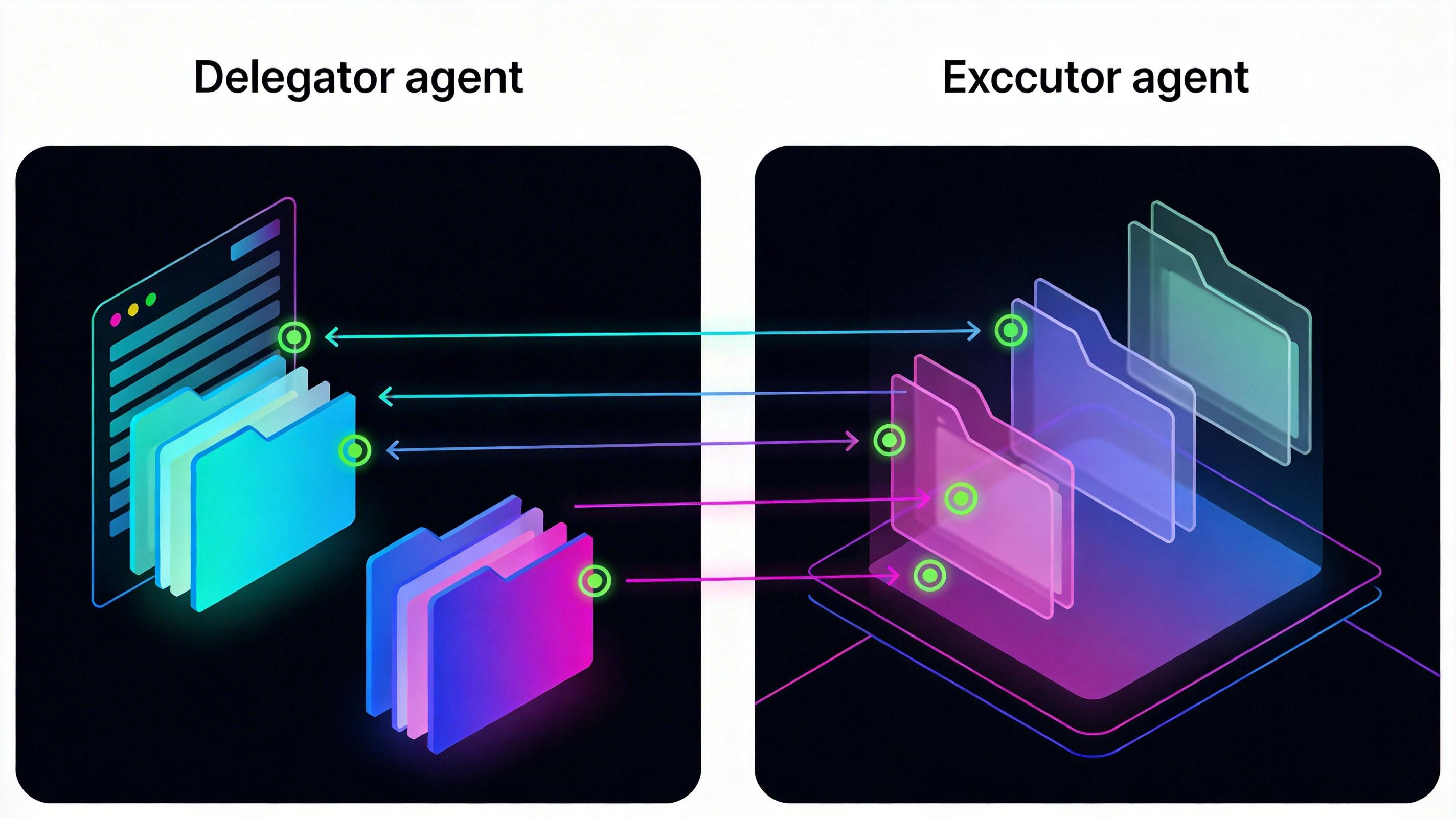
通过AWCP,你的主智能体(Delegator)可以将自己的工作区(一个或多个目录)“投影”给一个远程的专家智能体(Executor)。专家智能体可以直接在自己熟悉的环境里,用自己的工具链操作这些被投影过来的文件,所有的修改都能实时同步回去。协作的本质从“传话”和传递孤立的“工件”,变成了在共享的、完整的项目上下文中“共事”。
将整个工作区共享给另一个AI,听起来风险很高。AWCP如何确保这个过程安全、可靠且高效?其技术架构设计精妙,主要体现在以下几个方面:
控制面与数据面分离:这是AWCP架构的基石。控制面使用标准的HTTP和SSE(服务器发送事件)协议,负责“沟通和管理”,比如协议握手、状态同步和生命周期管理。数据面则负责“搬运”,通过可插拔的传输适配器来实际同步文件。这种分离设计,意味着无论数据传输方式如何变化(比如从本地的SSHFS切换到云端的对象存储),控制逻辑都保持稳定,极大地增强了灵活性和可扩展性。
严谨的四阶段握手:整个协作过程被设计成一个严谨的四阶段生命周期,如同一次正式的商业合作:
健壮的双状态机设计:为了应对分布式系统中的不确定性,AWCP在协作双方各维护一个独立的状态机。发起方(Delegator)有9个状态,追踪从创建到完成的全过程;执行方(Executor)则只有4个核心状态。两者通过几条关键消息同步,但不共享状态存储。这种设计远比维护一个全局一致的状态要稳健,大大降低了因网络问题导致状态错乱的风险。

理论再完美,仍需实践检验。AWCP论文给出的两个演示场景,生动地展示了其在解决“能力非对称”和“信任非对称”这两大协作痛点上的巨大价值。
场景一:跨模态数据集整理
一个纯文本智能体(看不懂图片)接到任务,需要整理一个包含上百张混乱图片的文件夹。在过去,它只能将整个文件夹打包发给一个多模态智能体,等待对方逐张识别后返回一个描述性的JSON文件,再根据这个文件决定如何操作,过程漫长且笨拙。
有了AWCP,纯文本智能体直接将图片目录“委派”给一个视觉智能体(如Gemini 3 Pro)。视觉智能体通过SSHFS将这个目录挂载到本地,就像操作自己的文件夹一样,直接在里面创建子目录(如“猫”、“狗”),并移动图片文件。所有变更实时同步回发起方的工作区。一次委派,纯文本智能体就“借”来了一双眼睛,无缝获得了视觉能力。
场景二:企业级多轮合规盖章
用户通过OpenClaw平台提交一份合同,需要经过合规审核并加盖电子印章。OpenClaw本身是强大的任务编排平台,但它没有盖章权限。这是一个典型的信任非对称场景——盖章操作必须在受信任、有授权的环境中执行。
通过AWCP,OpenClaw将合同文件的工作区委派给一个专门的合规审计智能体。审计智能体在自己的安全环境中检查文档,如果发现材料缺失(如缺少身份证件),则拒绝并返回明确提示。用户补充材料后,OpenClaw可以发起新一轮的委派。最终,盖章操作在授权环境中完成,数字印章从未离开过它所处的安全区域,完美解决了权限和信任隔离的问题。
AWCP并非没有局限。其团队坦言,当前版本主要实现了一对一委派的最小闭环,而更复杂的**细粒度权限控制和沙箱执行环境**是其走向大规模生产应用前必须攻克的难关,这也是他们未来的重点工作方向。
回顾互联网的发展史,HTTP协议的诞生让孤立的计算机连接成了万维网。今天,无数强大但孤立的AI智能体,正处在类似的历史转折点。它们需要一套通用的语言和协作范式,才能真正形成超越个体的群体智能。
AWCP的定位并非要取代任何现有的编排框架或智能体平台,而是为所有上层应用提供一个标准化的、底层的“工作区委派”原语。当智能体越来越专业化,当协作的深度远超简单的消息传递时,一个标准化的工作区层将成为未来智能体网络不可或缺的基础设施。AWCP能否成为这个层的事实标准,尚待社区的采纳和生态的发展,但它无疑已经为通往更高级协作形态的道路,铺下了一块至关重要的基石。
点击充电,成为大圆镜下一个视频选题!