对抗知识焦虑,从看懂这条开始
App 下载
纯仿真训练的机器人,直接上岗成功率90%
软体物体操作|零样本迁移|仿真数据训练|SIM1系统|上海AI Lab|AI智能体|人工智能
对抗知识焦虑,从看懂这条开始
App 下载软体物体操作|零样本迁移|仿真数据训练|SIM1系统|上海AI Lab|AI智能体|人工智能
想象一下:你在仿真游戏里练了几百次叠衣服,第一次上手真实洗衣机旁的T恤,居然一次就叠得服服帖帖——这不是游戏外挂,是机器人刚实现的真实能力。上海AI Lab的SIM1系统,让机器人仅凭纯仿真数据训练的策略,零样本迁移到真实场景的成功率突破90%,还把训练成本砍到原来的1/27。
这背后藏着一个被忽视的真相:机器人行业卡脖子的从来不是模型不够大,而是高质量数据不够多——尤其是像布料这种软乎乎、随便动一下就有无数种形态的物体,真实数据采集成本高到离谱。SIM1没有去凑海量低质仿真数据,而是先把数据做对,让仿真从“现实的廉价替代品”,变成了“现实的数据生产工厂”。为什么这一步能让机器人直接上岗?
你可以把机器人的仿真训练想象成学开车:在模拟机上把科目二练到满分,一摸真车却连库都倒不进去——这就是困扰行业多年的“仿真-现实鸿沟”。SIM1把这道墙拆成了三块:几何、物理、运动。
几何鸿沟是“场景不对”:仿真里的T恤和真实的T恤,哪怕褶皱差一毫米,机器人的抓取点就会偏;物理鸿沟是“手感不对”:仿真里布料被抓起的回弹速度、拉伸幅度,和真实布料永远差口气;运动鸿沟是“节奏不对”:仿真里机器人抬手、折叠的快慢,和真实机器人的机械响应永远不同步。只要有一块砖没对齐,仿真数据就是废纸——能练手,不能上岗。

传统方法要么靠堆数据硬填,要么靠真实数据“补课”,本质都是在墙上贴补丁。SIM1的思路是直接拆墙:先拿亚毫米级扫描把真实场景1:1复刻成数字孪生,再用全新的变形稳定求解器让仿真里的布料动得和真的一样,最后让机器人学的不是固定动作,而是能组合出无数种节奏的“动作词汇”。
布料是机器人的噩梦:它没有固定形状,拉伸、折叠、堆叠的状态多到数不清,传统仿真只能算个大概——就像用简笔画学素描,画得再像也抓不住光影细节。SIM1的变形稳定求解器,第一次让仿真真正“理解”了布料的物理逻辑。
传统仿真把布料拆成一个个独立的小粒子,每个粒子只算自己受到的力,结果就是布料动起来要么局部抖成筛子,要么整体飘起来。SIM1把布料改成了“全局响应系统”:只要一个地方被拉伸,这个力会在一瞬间传遍整个布料网格,就像你扯T恤领口,整个衣身都会跟着绷紧——这才是真实布料的样子。
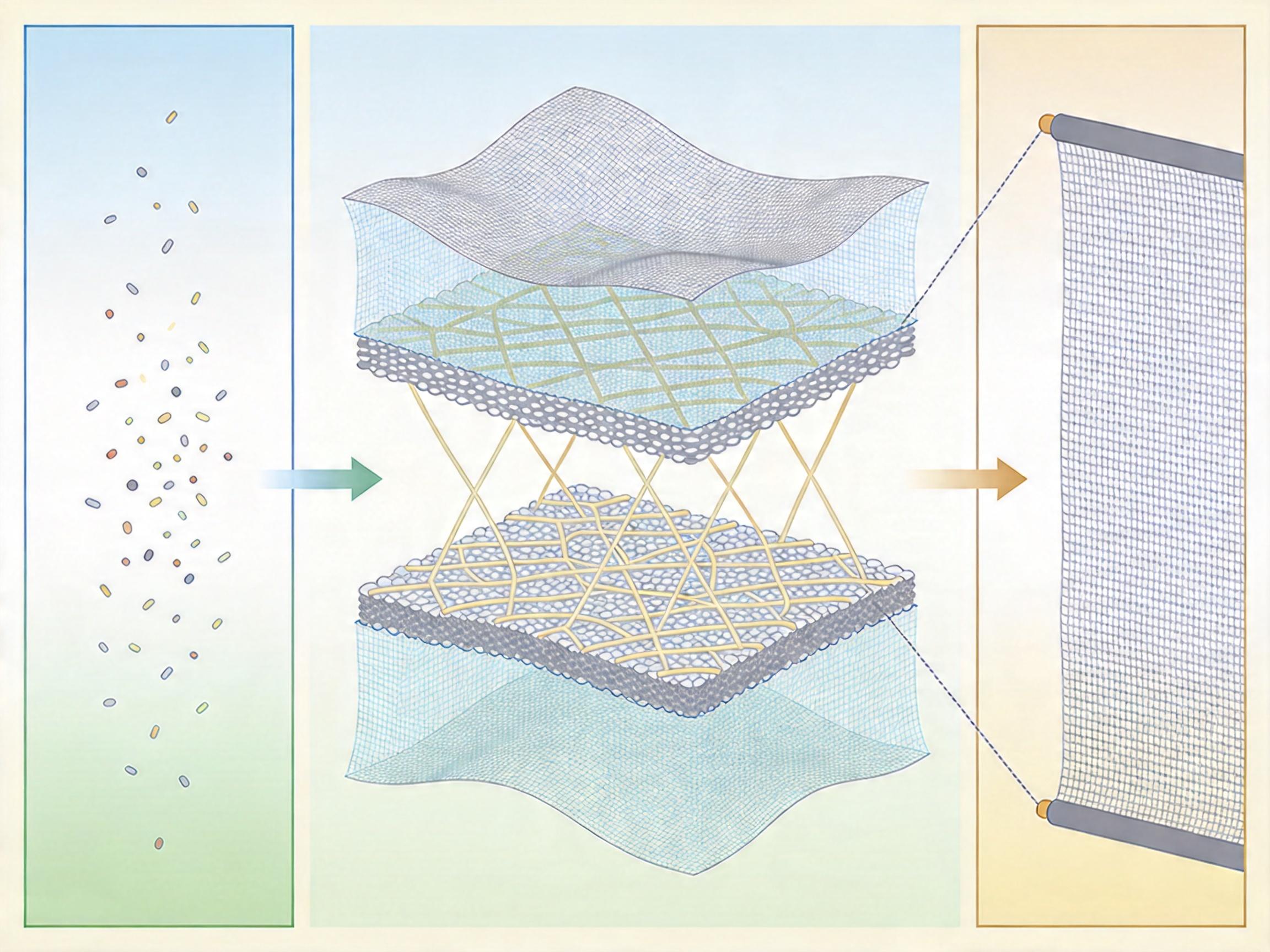
你可以把这个过程类比成包饺子:传统仿真只会捏一个个独立的褶子,SIM1则是从面团的弹性、擀皮的力度到捏褶的受力,全程跟着真实手感走。这样练出来的机器人,拿到任何一件没见过的T恤,都能像人一样感知它的软硬度、褶皱走向,而不是对着预设的坐标机械地抬手。
过去机器人的数据采集,就像老裁缝手工做衣服:一个操作员盯着屏幕遥操作,一天最多攒几十条有效数据,成本高不说,还永远覆盖不了所有场景。SIM1把这个小作坊改成了自动化工厂。
它只需要200条真实演示数据当“种子”,系统会自动把这些演示拆成“抓取、提起、折叠、释放”这些基础动作单元——就像一套动作积木。然后用生成式模型把这些积木随机组合,再搭配不同的布料材质、光照、视角,就能生成数万条形态各异但物理逻辑完全正确的操作轨迹。
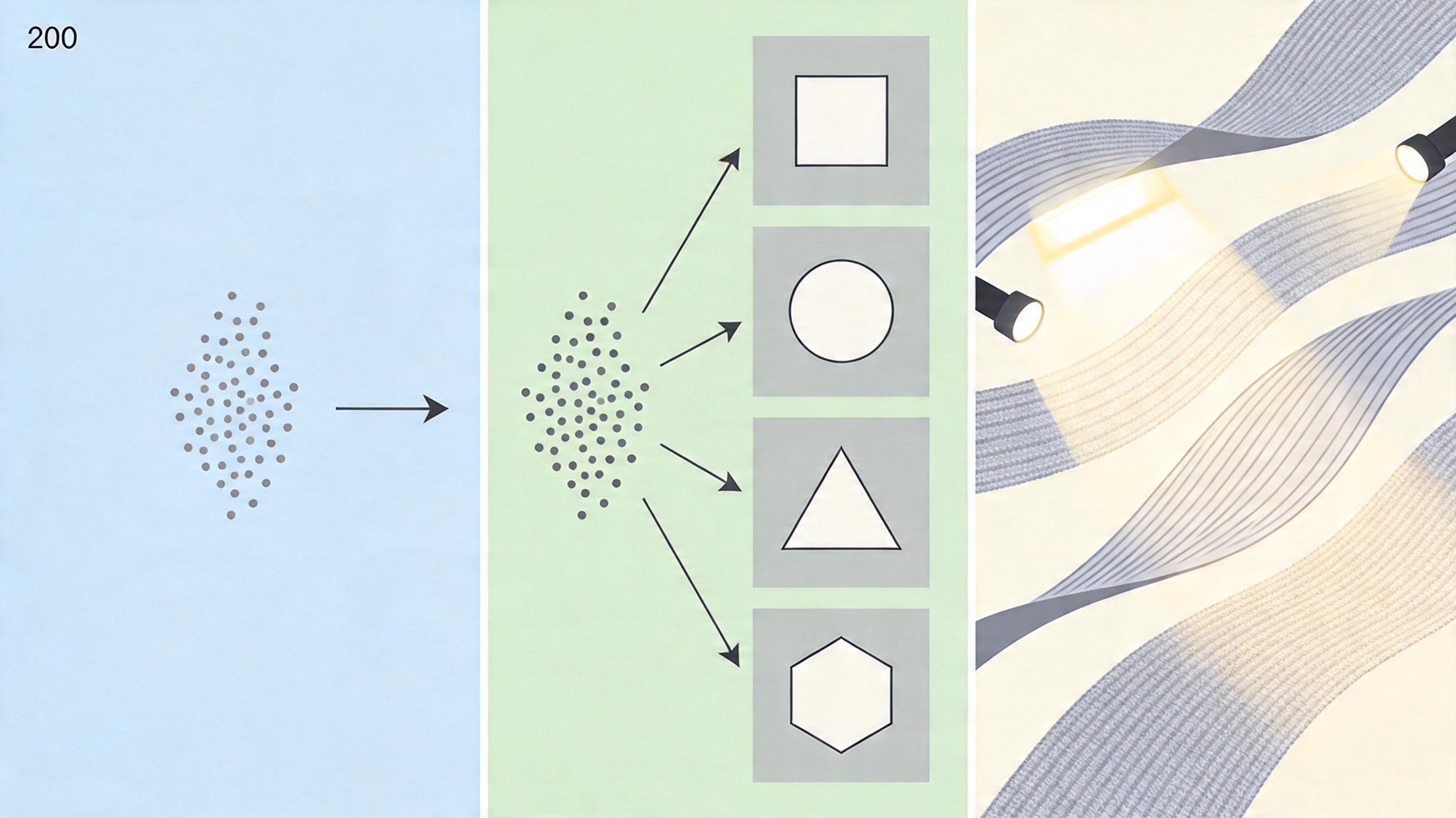
更关键的是,这些数据不是“看起来像真的”,而是“真的能用”。在真实机器人测试中,它对没见过的衬衫、短裤的操作成功率超过70%,比纯真实数据训练的模型泛化能力高50%。相当于你在工厂里用同一个模具,能做出适合所有人的衣服——这才是规模化的核心。
当然,SIM1也不是万能的:它目前还只能处理布料这类柔体,对液体、颗粒状物体的仿真精度还不够;而且一旦遇到极端场景,比如被雨水泡过的湿布料,仿真和现实还是会出现偏差。但它至少证明了一件事:数据的质量,永远比数量重要。
当我们还在争论机器人的模型要做多大时,SIM1悄悄把行业的焦点拉回了最朴素的问题:先把基础数据做对。它不是给机器人装了更聪明的大脑,而是给它建了一个能无限复刻真实手感的训练场。
数据做对,智能才会真正落地。
未来的机器人可能不需要在真实世界里摔几百次跤,只需要在仿真工厂里“摸”透每一种布料的手感,就能走进千家万户叠衣服、整理床单——而这一切的起点,不是更大的模型,而是更真实的“一次折叠”。