对抗知识焦虑,从看懂这条开始
App 下载
380克的手能提30公斤,仿生手靠的是这根绳
肌腱仿生结构|高自由度机械手|仿生手|腱绳驱动灵巧手|生物医学工程|前沿科技
对抗知识焦虑,从看懂这条开始
App 下载肌腱仿生结构|高自由度机械手|仿生手|腱绳驱动灵巧手|生物医学工程|前沿科技
想象这样一只手:重量还不到一听可乐,却能提起整整30公斤的重物;能精准捏起一片药片,也能稳稳握住一把扳手。这不是科幻电影里的道具,而是已经实现量产的高自由度腱绳驱动灵巧手。它的秘密藏在那些细如发丝的腱绳里——这些模仿人类肌腱的绳索,正在打破机器人“要么笨重要么无力”的死局。但要让这只手像人手一样灵活、可靠,背后是一系列连工程师都头疼的难题。
你可以把腱绳驱动灵巧手的结构,想象成一只用线操控的木偶——只不过这根线不是用来拽木头,而是要精准控制每一个关节的弯曲角度和力度。
人类的手指之所以灵活,靠的是前臂肌肉拉动指骨间的肌腱。腱绳驱动的思路完全照搬了这套逻辑:把沉重的电机和驱动器藏在机械臂的“前臂”里,用几根高强度的腱绳穿过手掌内部的滑轮,像拉窗帘一样拉动指关节。这样一来,手部本身不需要安装任何动力部件,重量能压缩到普通机械臂手的三分之一甚至更低。
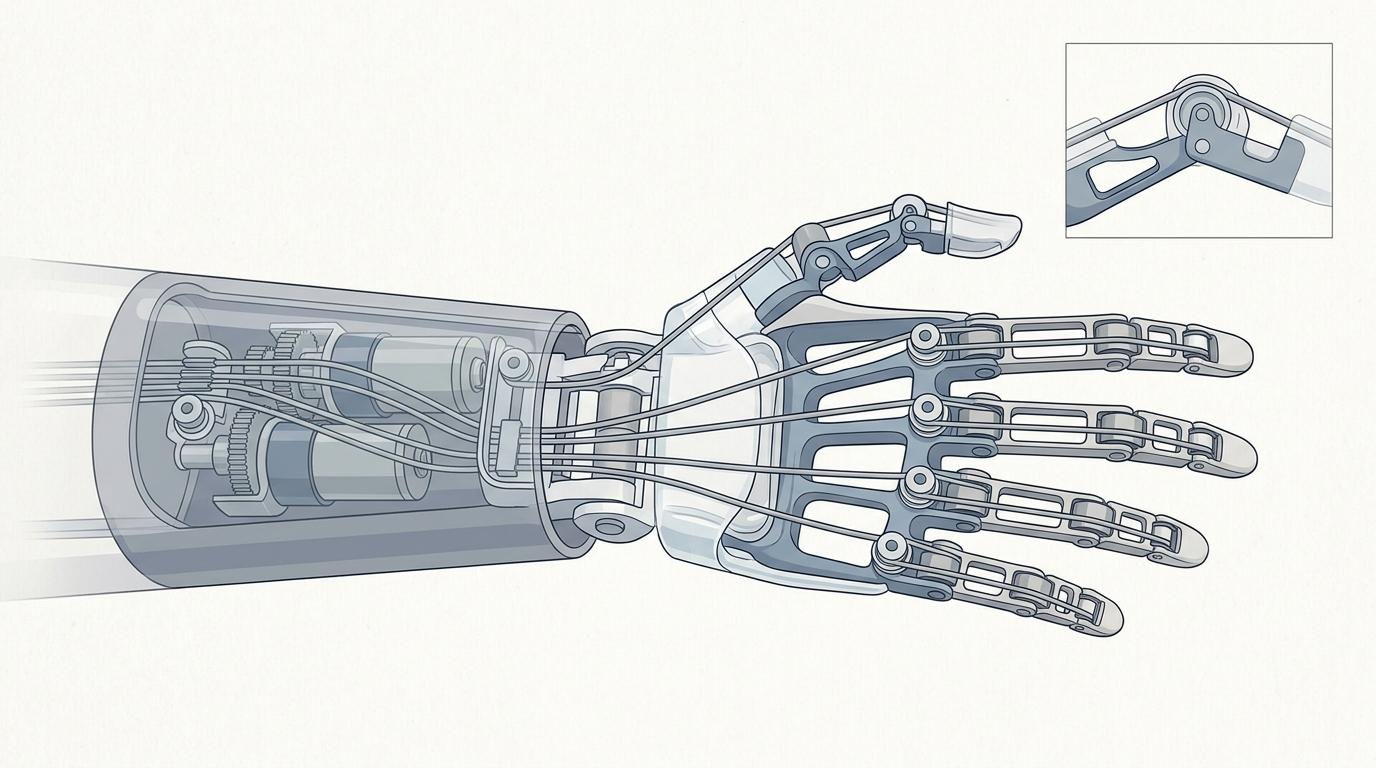
但真实的机制比木偶复杂得多:
腱绳驱动的优势显而易见,但要让它真正能用,工程师得闯过三道难关。
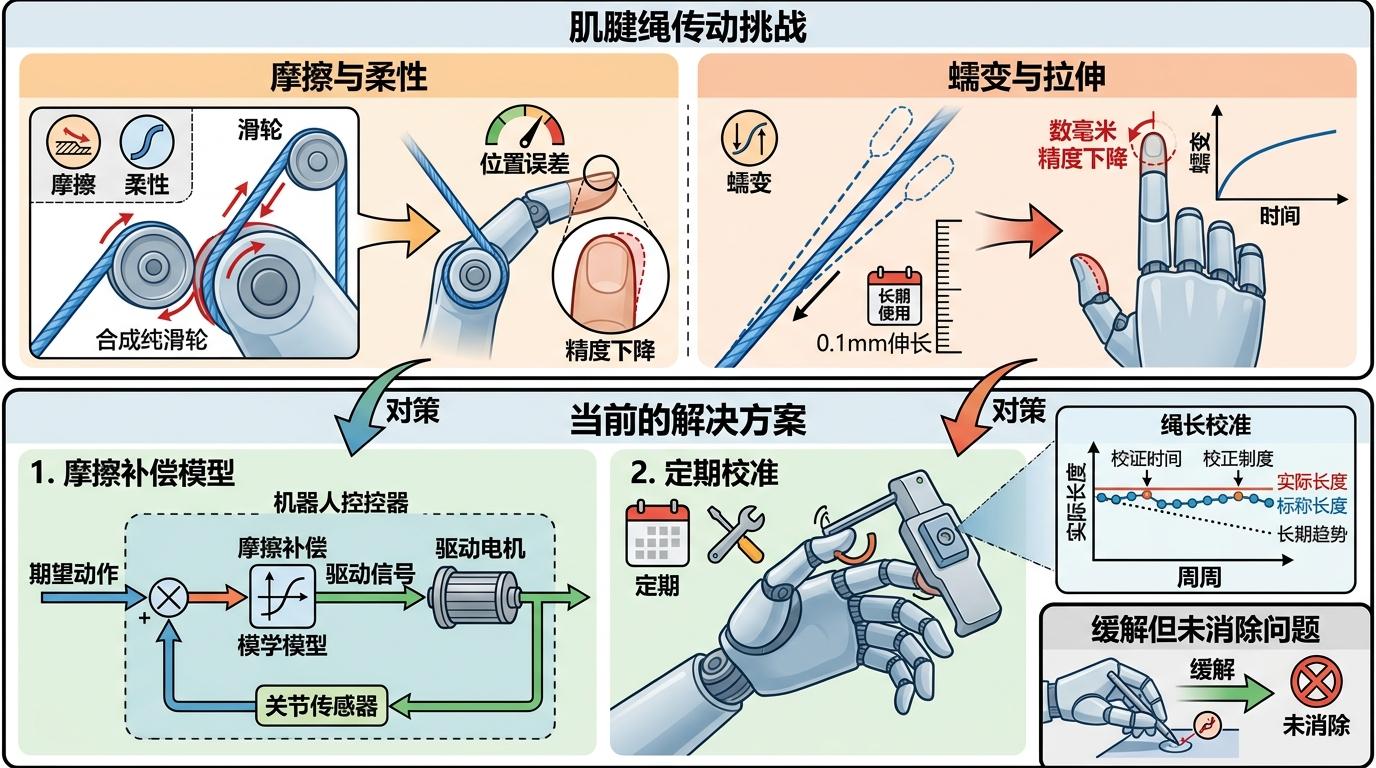
第一道关是“绳不听话”。腱绳是柔性的,在滑轮上滑动时会产生摩擦,长期使用还会出现“蠕变”——也就是像橡皮筋一样慢慢变长。哪怕只是0.1毫米的伸长,都会让手指的动作精度下降几个毫米。现在的解决办法是在控制算法里加入“摩擦补偿模型”,同时定期用传感器校准绳长,但这只能缓解问题,没法彻底消除。
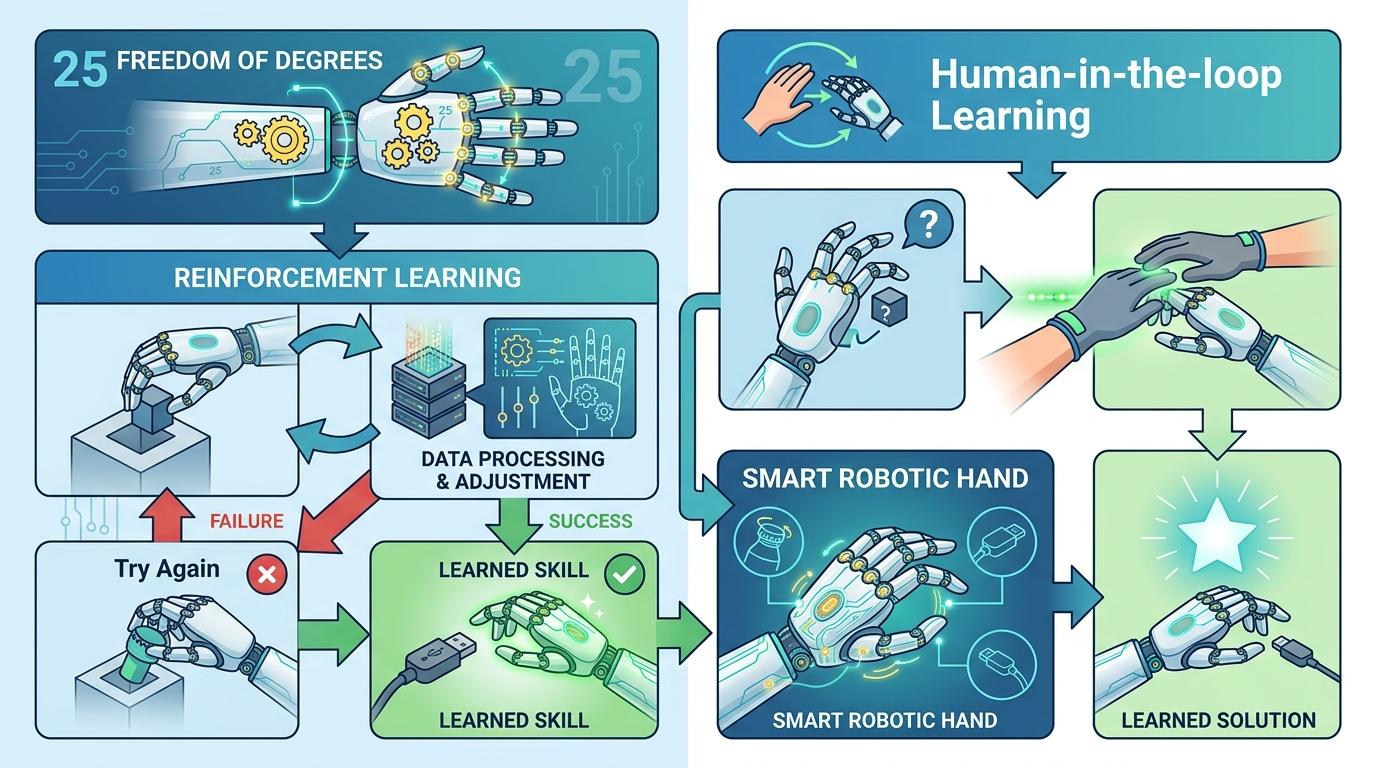
第二道关是“手太聪明”。一只25个自由度的灵巧手,就像有25个独立的小电机在同时工作,要让它们协同完成“拧瓶盖”“插USB”这类动作,需要处理的数据量堪比一台小型服务器。工程师们用上了强化学习:让机器手反复尝试同一个动作,每失败一次就调整一次参数,直到能像人类一样“凭感觉”找角度。更聪明的是“人类在环”学习——当机器手卡壳时,人类操作员可以轻轻纠正它的动作,它就能记住这个“正确答案”,下次遇到类似情况就不会出错。
第三道关是“量产难”。实验室里的原型机可以靠手工打磨,但要生产一万只一模一样的手,每根绳的长度误差不能超过0.01毫米,每个滑轮的安装角度都要分毫不差。这就需要把消费电子行业的精密制造经验搬过来——比如用自动化绕线机缠电机,用3D打印制造定制化的手掌骨架,还要建立一套从材料检测到成品测试的完整标准。
很多人以为,灵巧手的自由度越高越好,但实际上,工程师们一直在做“减法”。
人类的手有20多个自由度,但我们日常用到的动作其实只有几十种:抓握、捏取、扭转、按压……如果给机器手设计太多用不上的自由度,不仅会增加重量和成本,还会让控制算法变得异常复杂。现在的趋势是“任务导向设计”——比如给工业机器人用的手,就强化它的抓握力和耐用性;给服务机器人用的手,就重点优化它的灵活性和安全性。
还有一个容易被忽略的问题是“成本”。实验室里的原型机可能要几十万元一台,但要让它走进工厂、医院甚至家庭,价格必须降到几万元甚至更低。这就需要在材料和结构上做平衡:比如用更便宜的碳纤维替代部分金属零件,用标准化的模块替代定制化设计。目前国内厂商已经把单价压缩到了3-8万元,是国外同类产品的三分之一。
当一只不到400克的机器手能提起30公斤重物时,我们看到的不只是技术的进步,更是人类对“灵活”的重新定义。过去我们以为机器人必须坚硬、精准,现在才发现,像人类一样“柔软地发力”,反而能完成更多看似不可能的任务。
未来的机器手不会只是人类手的复制品,它会结合材料科学、人工智能和制造工艺的进步,长出属于自己的“肌肉”和“神经”。而那些细如发丝的腱绳,就像连接未来的丝线,正在把机器人从冰冷的机器,变成能和我们并肩工作的伙伴。
仿生的本质,是向自然借智慧。