对抗知识焦虑,从看懂这条开始
App 下载
不用电机齿轮,机器人靠“血肉”突破灵巧极限
材料成本|柔性驱动|机器人手|仿生肌肉|波兰机器人团队|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载材料成本|柔性驱动|机器人手|仿生肌肉|波兰机器人团队|具身智能|人工智能
当波士顿动力的机器人还在靠电机齿轮跑跳时,波兰的一个小团队已经造出了能捏起细针、抓起7公斤重物的机器人手——它没有金属关节,靠的是像人类一样的“肌肉”和“骨骼”。这只手的材料成本不到2800美元,只有传统刚性机器人手的几分之一,却能完成更接近人类的细腻动作。为什么有人放着成熟的电机技术不用,非要回头模仿60多年前的人工肌肉设计?这背后藏着机器人突破灵巧极限的另一条路。
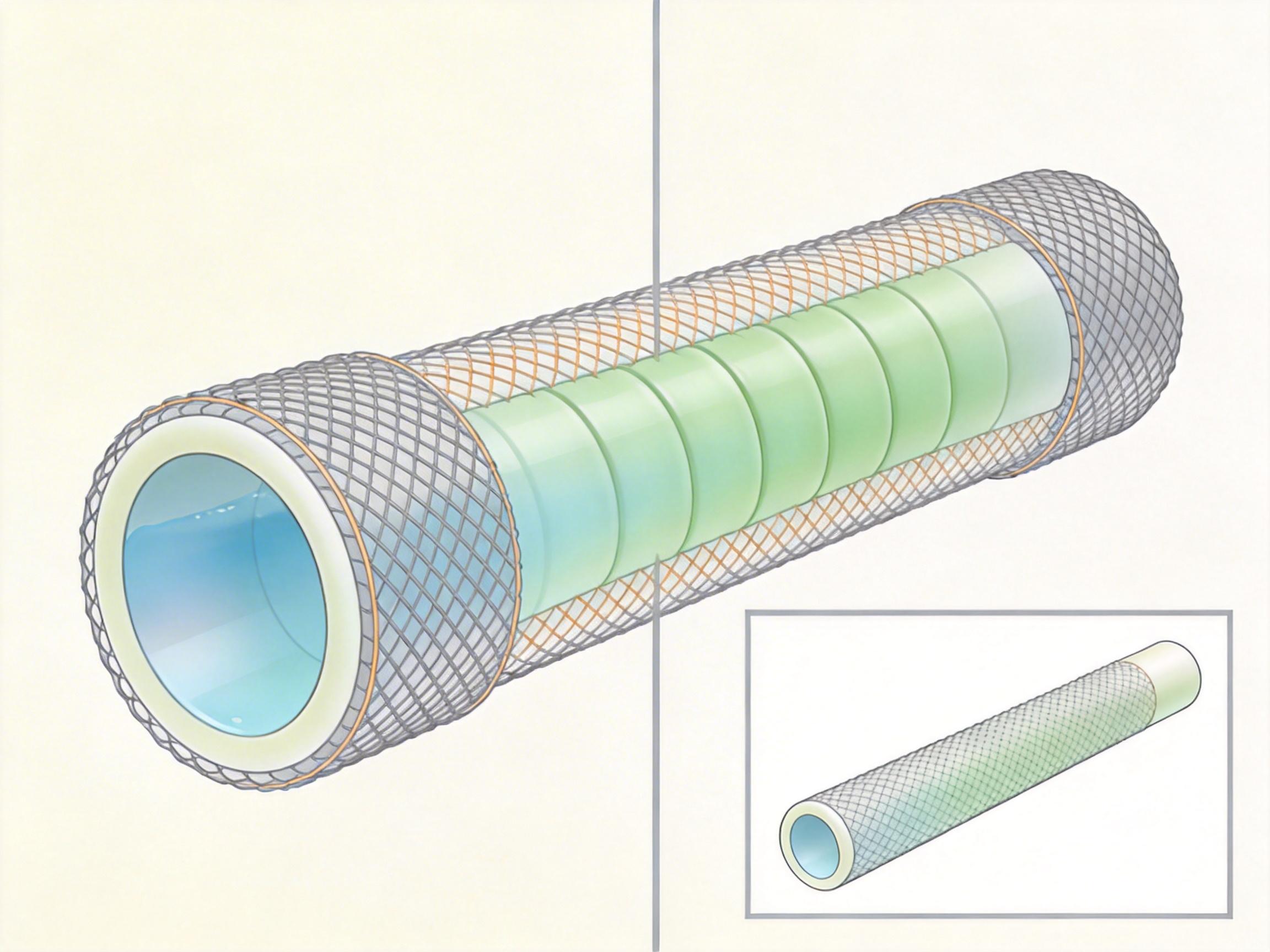
你可以把这种仿生肌肉想象成一根套着编织网的橡胶水管:往水管里注水加压,橡胶管会膨胀,但外层的编织网限制了它变粗,只能沿着长度方向收缩——就像人类肌肉发力时的状态。这不是什么全新发明,1957年就出现的McKibben型人工肌肉就是这个原理,但当时的材料和控制技术跟不上,只能停在实验室里。
现在的研究者给它做了三重升级:用高强度纤维替换普通编织网,让肌肉能承受65万次收缩循环;在肌肉里嵌入织物传感器,不用额外装置就能感知收缩幅度;再搭配小型电液阀和压力反馈系统,把控制精度提了上去。
最关键的是成本。他们用碳纤维做骨骼,用聚合物替代金属部件,把整只手的材料成本压到了2800美元以内。对比传统刚性机器人手动辄数万美元的价格,这种“血肉结构”第一次让高灵巧性机器人有了规模化应用的可能。
要让27个自由度的手像人类一样灵活,光有肌肉还不够——得解决“怎么指挥肌肉”的问题。传统机器人的电机是“精准听话”的,给多少指令就动多少,但仿生肌肉是非线性的:同样的压力,在不同收缩状态下的发力不一样,还存在迟滞效应。
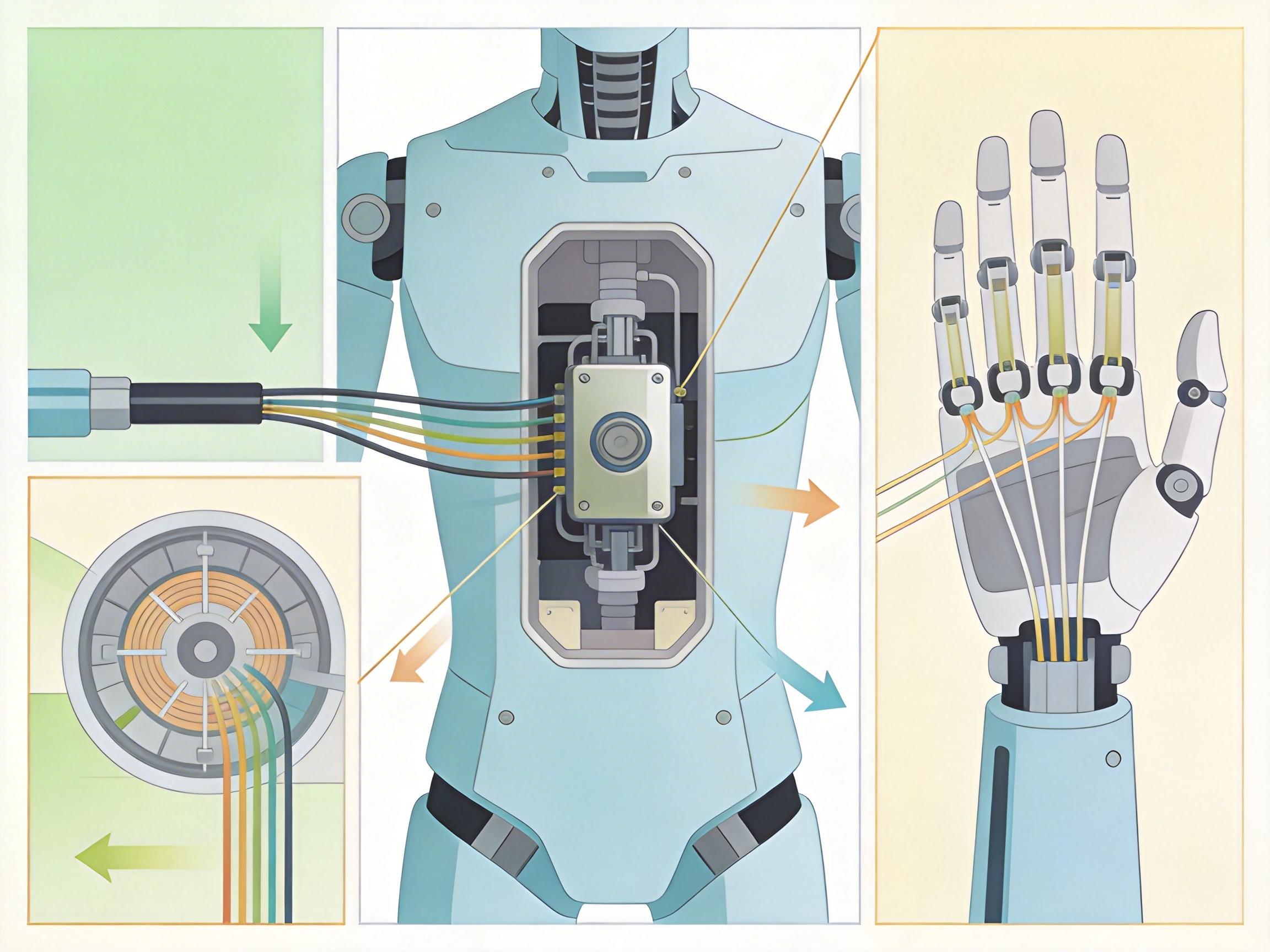
研究者们找到了两个解决思路:一是模仿人类的肌肉拮抗原理,每一个关节都用一对“拉”和“推”的肌肉来控制,就像人类的肱二头肌和肱三头肌配合;二是用上了物理储备计算——把肌肉本身的复杂动力学当成计算资源,不用提前给所有动作编程,让系统在运动中自己学习调整。
还有更巧妙的设计:把驱动单元放在机器人的躯干里,用Bowden线缆像肌腱一样远程拉动手指关节。这样既减轻了手部的重量,又避免了液压管路在手指上的缠绕,让整只手的动作更接近人类的自然姿态。
这种仿生驱动的优势很明显:柔软、安全、成本低,能在人机协作、医疗康复这些场景里发挥作用,但它离真正替代人类完成复杂任务,还有三道坎要跨。
第一道是耐久性。虽然现在的肌肉能承受65万次收缩,但和人类肌肉几十年的寿命比起来,还是差得远,而且液压系统的密封问题始终存在,时间长了难免泄漏。第二道是能耗和便携性:液压泵的重量和能耗都不小,现在的机器人上半身只能靠电池续航2小时,离实用还有距离。
第三道是智能控制的天花板。现在的机器人手还得靠人类编程或者演示来学习动作,要让它像人类一样“无师自通”地完成陌生任务,还得把仿生驱动和更先进的AI算法结合起来——比如让机器人通过视觉观察,自己判断该用多大的力气抓鸡蛋,用多大的力气搬箱子。
当我们谈论机器人的未来时,总习惯盯着“跑得更快、力气更大”的指标,却忘了人类最珍贵的能力是“灵巧”——是能轻轻抚摸婴儿的手,是能精准修复精密仪器的手。仿生肌肉和骨骼的意义,不是造出另一个钢铁巨人,而是让机器人拥有“温柔的力量”。
从1957年的实验室原型,到今天能抓起7公斤重物的机器人手,这条路走了近70年。模仿自然,才是超越机器的捷径。未来的机器人,或许不用像人类一样思考,但会像人类一样动作——而这,才是通用机器人真正的起点。