对抗知识焦虑,从看懂这条开始
App 下载
自动驾驶路口决策卡壳,靠「分期付款」算赢博弈
弗吉尼亚理工|纳什均衡|分期付款算法|路口决策|自动驾驶|人工智能
对抗知识焦虑,从看懂这条开始
App 下载弗吉尼亚理工|纳什均衡|分期付款算法|路口决策|自动驾驶|人工智能
想象你坐在一辆自动驾驶车里,正冲向上海早高峰的交叉路口:左边的SUV在打转向灯,对面的电动车在犹豫加速,右边的出租车摆明了要抢行。你知道,车的每一个动作——踩油门还是踩刹车——都在和周围的车做一场实时博弈。但你可能不知道的是,这场博弈的计算量,曾大到让最先进的车载电脑都要卡壳0.5秒。0.5秒,足够一辆以60公里时速行驶的车冲出8米。而现在,弗吉尼亚理工的研究者用一个「分期付款」的思路,把这场必须毫秒级完成的博弈,从「算不起」变成了「算得赢」。
自动驾驶的路口决策,本质是一场多玩家的纳什均衡游戏——每辆车都要选一个「自己最划算,也不被别人干扰」的策略。理论上,用博弈论模型预测控制(GT-MPC)能算出这个完美策略:每0.1秒就预测未来3秒的所有可能轨迹,找到全局最优解后只执行第一个0.1秒的动作。
但现实是,求解纳什均衡的计算量,相当于在每个0.1秒内解出几十组复杂方程组。实验室里用超级计算机算没问题,但车载芯片的算力,撑不起这种「每一步都推倒重来」的计算。就像你每走一步路,都要停下来用计算器重新规划整条路线——等你算完,路都变了。
这就是自动驾驶的核心矛盾:理论上的最优决策,在真实道路上「慢到致命」。
弗吉尼亚理工的解法,说穿了就是「不从头算」。他们提出的「时间分布迭代」,把原本要在一个0.1秒内完成的计算,像还房贷一样分摊到连续的十几个0.1秒里。
具体操作分两步:首先是「预热启动」——上一个0.1秒算出的近似解,经过简单的时间平移(比如把「未来3秒」的轨迹往前挪0.1秒),直接作为这一秒的初始猜测值。就像你今天出门的路线,不用重新查地图,直接沿用昨天的路线微调就行。
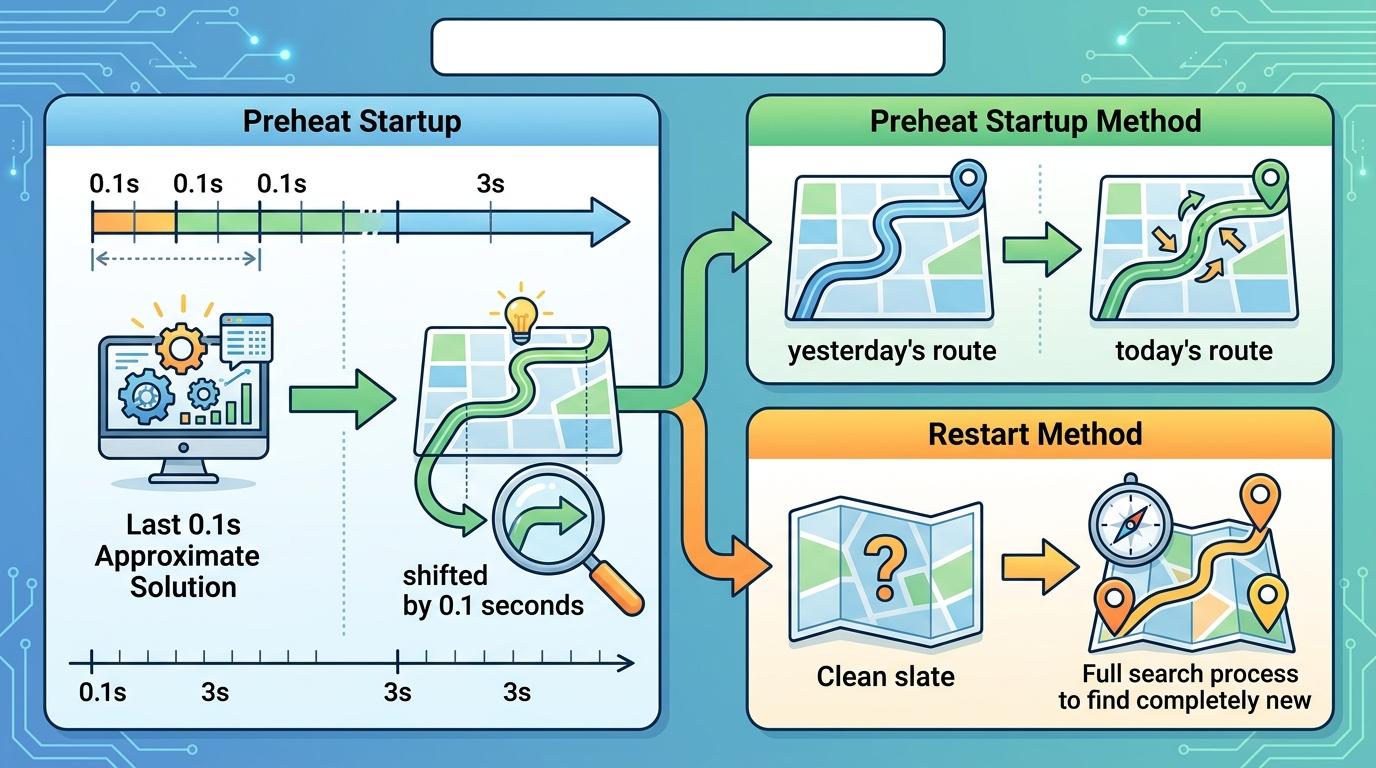
然后是「有限迭代」——拿着这个已经接近最优解的初始值,只做3次牛顿法迭代微调,而不是像以前那样算到「完美无缺」。这3次迭代的计算量,只相当于原来的十分之一,却能得到误差在可控范围内的近似解。
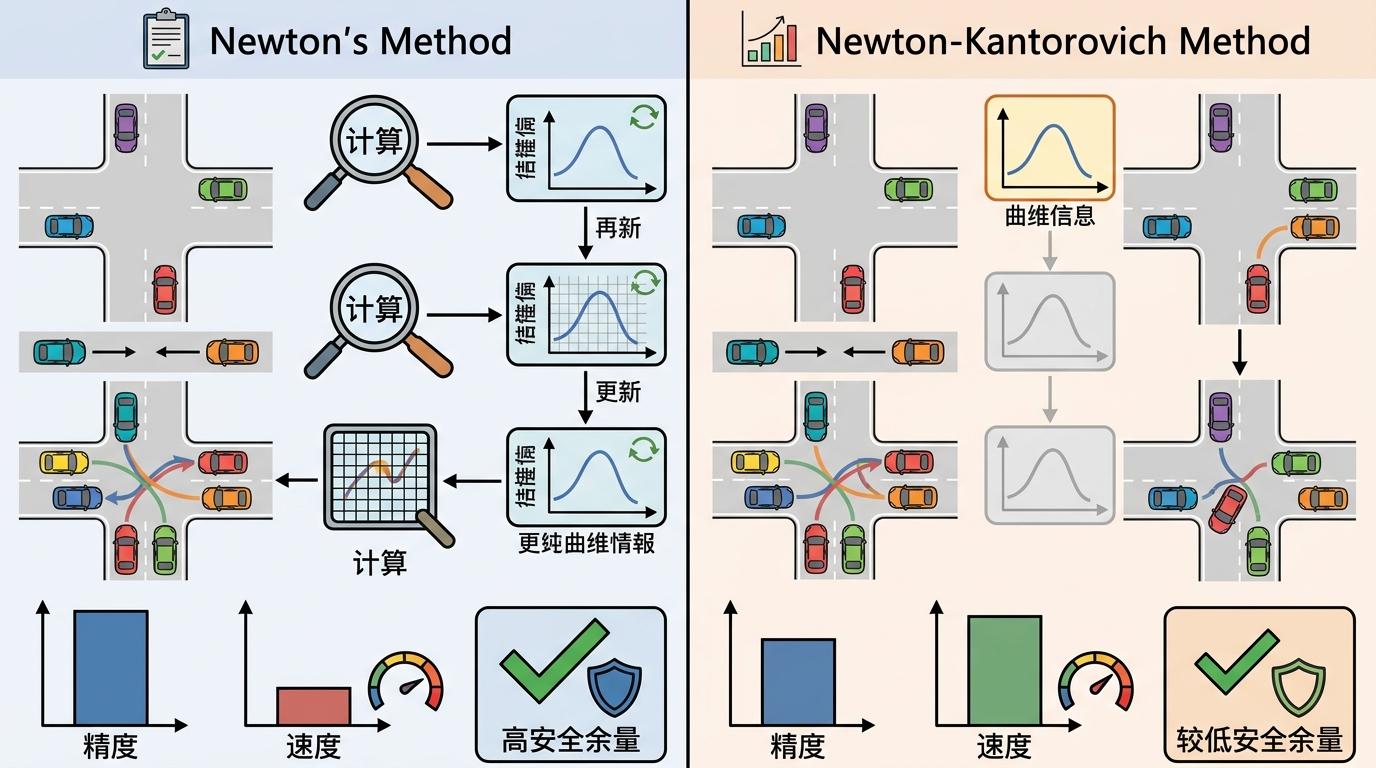
为了平衡精度和速度,研究者还对比了两种「迭代工具」:牛顿法每一步都重新计算曲率信息,精度高但慢;牛顿-康托洛维奇法则只算一次曲率信息就反复用,速度快但精度略低。实验显示,在路口车辆交互弱的时候,两者误差都极小;只有在路口中心车辆挤成一团时,牛顿法的精度优势才会显现——而这时,多花的那点计算时间,换的是实打实的安全余量。
研究者用一个经典的五车交叉路口场景验证了这个方法:五辆车从四个方向同时驶向路口,要在没有信号灯的情况下博弈出通行顺序。他们用MATLAB算出的「精确解」做基准,对比时间分布迭代的误差和速度。

结果很直观:不管用势函数优化还是最佳响应动力学算法,时间分布迭代都把单步计算时间压缩到了毫秒级——完全满足车载实时性要求。更有意思的是误差的分布:当车辆还在远处、交互弱的时候,误差几乎为零;只有当车辆挤在路口中心、每辆车的决策都直接影响别人时,误差才会明显上升。
这恰恰印证了方法的核心逻辑:前后时刻的博弈场景越像,「预热启动」的效果就越好。就像早高峰的路口,今天和昨天的车流规律差不了多少,用昨天的经验微调今天的决策,足够应付绝大多数情况。
很多人以为,自动驾驶的突破靠的是颠覆式的新理论,但这次的「时间分布迭代」恰恰相反——它没有发明新的博弈论,只是把成熟的牛顿法,用一个「分期付款」的思路重新包装了一下。
这可能才是AI落地的真正逻辑:不是要创造完美的理论,而是要把理论掰碎了、揉进工程的现实里。就像自动驾驶的路口决策,不需要算出绝对完美的纳什均衡,只需要在毫秒级的时间里,算出一个「足够好、足够快」的解——毕竟,路上的车不会等你算到完美,只会等你做出反应。
真正的技术突破,往往是让「理论上的好」,变成「现实里能用」。