对抗知识焦虑,从看懂这条开始
App 下载
智能驾驶不靠芯片堆算力,靠身体懂环境
人车环境交互|底盘动力|传感器系统|智能驾驶|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载人车环境交互|底盘动力|传感器系统|智能驾驶|具身智能|人工智能
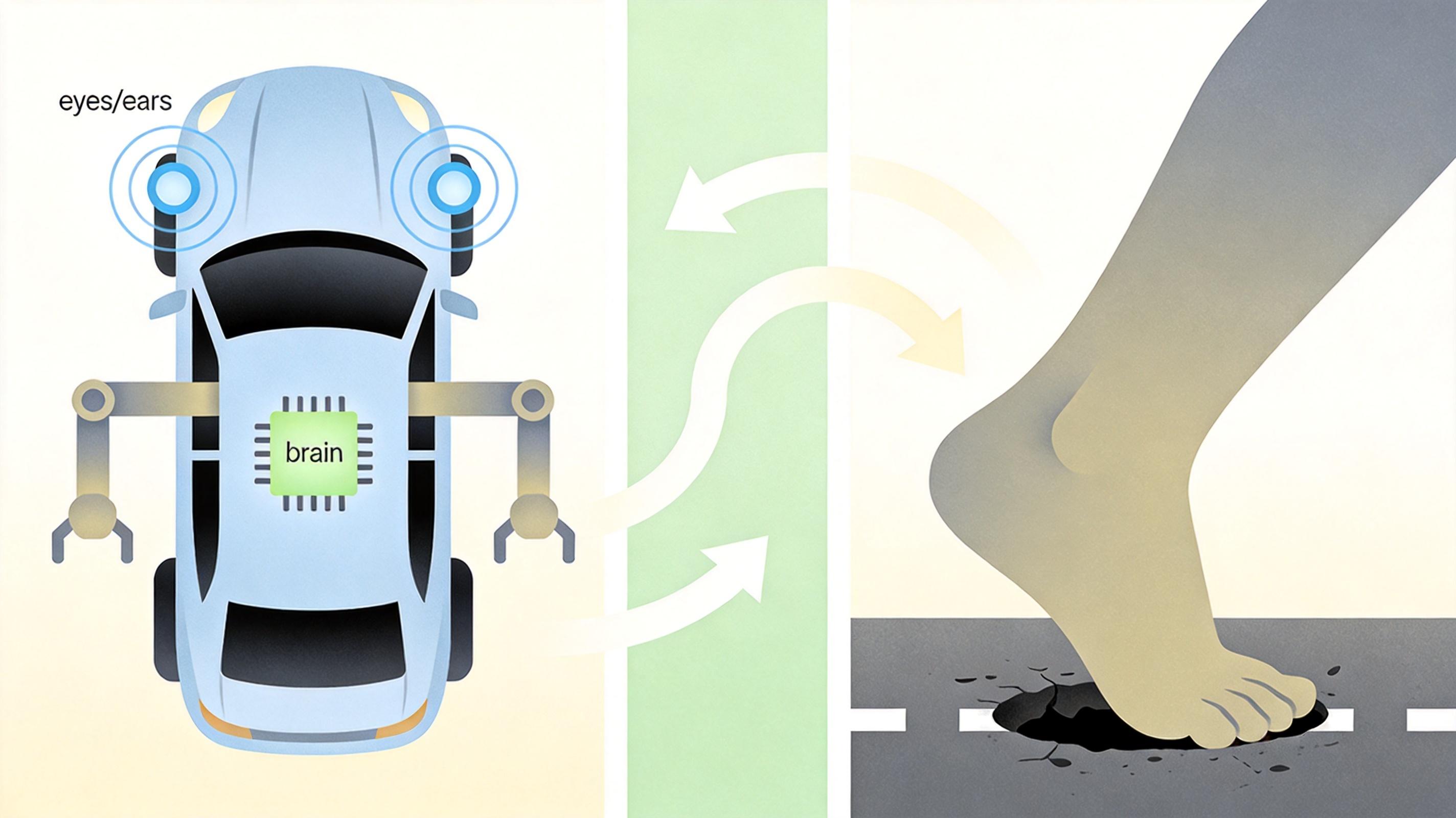
想象你开着车经过一个被货车挡住视线的路口,你会本能地放慢速度、微微探头观察——这不是大脑的单独决策,是眼睛、手脚和路况共同作用的结果。现在,车企正把这套人类的本能教给汽车:让它不再只靠芯片里的算法‘思考’,而是像人一样用‘身体’(传感器、底盘、动力系统)和环境互动,完成驾驶决策。这就是具身智能,它正在把智能驾驶从‘堆算力的游戏机’,变成‘会适应环境的老司机’。但这背后,到底藏着怎样的技术逻辑?
你可以把传统智能驾驶理解成一个坐在车里的‘做题家’:靠摄像头、雷达收集路况,然后把数据塞进芯片里的算法,算出该加速还是刹车。但这种‘输入-计算-输出’的模式有个致命问题——遇到没算过的场景就会卡壳,比如突然窜出的猫、路边挥手的行人。
具身智能完全推翻了这套逻辑。它把汽车当成一个完整的‘智能体’:传感器是它的眼睛耳朵,底盘和动力是它的手脚,芯片则是大脑——但大脑不会单独做决定,它会根据手脚反馈的路况、眼睛看到的细节,实时调整动作。就像你走路时不用刻意计算每一步的力度,身体会自动适应路面的坑洼。
比如遇到狭窄会车,具身智能的汽车不会只靠算法算距离,它会通过底盘的震动感知路面宽度,结合摄像头的画面,一边微调方向一边慢慢倒车,就像老司机靠‘车感’操作一样。
光有‘身体’还不够,得有能快速反应的‘大脑’——这就是AI推理芯片的作用。和用来训练AI模型的‘训练芯片’不同,推理芯片专门负责把训练好的模型用到实际场景里,核心要求就是‘快’和‘省’。
你可以把训练芯片比作大学教授,花几个月时间研究一套解题方法;而推理芯片就是刚毕业的学生,要在几毫秒内用这套方法解出眼前的题——而且得用最少的电量,毕竟汽车不能背着发电机跑。
现在的高端推理芯片能做到每秒处理几十万亿次运算,还能把功耗控制在几十瓦以内。它会实时融合摄像头、雷达的多模态数据,不仅能识别前方的车,还能预测这辆车接下来会不会变道;不仅能看到路口的行人,还能判断行人是要过马路还是在等车。这些决策不是靠预设的规则,而是靠芯片里的模型‘学’会的人类驾驶逻辑。
当然,这背后也有挑战:比如怎么在有限的算力里塞进越来越复杂的模型,怎么保证芯片故障时汽车还能安全停车。目前行业的解法是‘冗余设计’——就像飞机有双发动机,汽车的关键计算模块也会有备份,确保万无一失。
具身智能听起来美好,但要真正落地,还有三道坎要跨。
第一是数据关。具身智能的模型需要大量‘互动式’数据,比如汽车在不同路况下的操作反馈,而不是简单的道路视频。像Wayve这样的公司,靠车队在全球不同城市收集数据,让模型学习不同国家的驾驶习惯——比如在欧洲要礼让行人,在美国要注意皮卡的盲区。
第二是成本关。目前一套高端的具身智能驾驶系统,光传感器和芯片就要几万块,这还没算研发成本。要让普通消费者用得起,就得把芯片的成本降下来,同时优化算法,用更少的算力实现同样的功能。比如有些车企开始用纯视觉方案,靠算法弥补雷达的缺失,就是为了降成本。
第三是信任关。你敢把方向盘交给一个‘靠身体感知’的汽车吗?这不仅需要技术上的安全验证,还得让用户理解这套逻辑。比如有些车企会把汽车的决策过程可视化,在屏幕上显示它‘看到’的东西、‘判断’的结果,让用户知道汽车不是在‘瞎开’。
当我们谈论智能驾驶时,我们其实在谈论‘让机器像人一样开车’。但过去我们总在模仿人的‘大脑’,现在才发现,人的驾驶智慧从来不是单独存在于大脑里的——它是眼睛、手脚、路况和经验的总和。
具身智能和AI推理芯片的结合,就是在还原这种最朴素的智能:不是靠算力堆出来的‘超级大脑’,而是能和环境互动、能从错误中学习的‘老司机’。
智能的本质,是适应,不是计算。 这句话不仅适用于汽车,也适用于所有想走进真实世界的AI。未来的汽车不会是一个装在轮子上的计算机,它会是一个能陪你安全走过每一段路的‘伙伴’。