对抗知识焦虑,从看懂这条开始
App 下载
机器人摸到了20厘米外的空气,这很重要
机器人触觉|亿元级融资|隔空感知|传感器阵列|柔性电子皮肤|具身智能|先进材料|前沿科技|人工智能
对抗知识焦虑,从看懂这条开始
App 下载机器人触觉|亿元级融资|隔空感知|传感器阵列|柔性电子皮肤|具身智能|先进材料|前沿科技|人工智能
想象一下:你伸手去拿桌上的玻璃杯,手指还没碰到杯壁,指尖就已经“知道”它的温度、表面的光滑度,甚至能感知到杯口的弧度——这不是超能力,而是机器人正在获得的新感官。2026年5月,一支专注柔性电子皮肤的团队完成亿元级融资,他们的核心技术,让机器人的“皮肤”不仅能摸,还能“隔空感知”20厘米外的物体。这意味着,机器人终于能像人类一样,用“触觉”提前预判环境,而不是只会对着摄像头“看世界”。但这背后的技术,到底是怎么让机器人“触感觉醒”的?
你可以把柔性电子皮肤理解成一张布满“神经末梢”的弹性薄膜——每平方厘米就挤着400个微型传感器,它们像人类皮肤里的触觉小体,能同时捕捉压力、温度、甚至物体滑动时的切应力。但和人类皮肤不同,它的“神经”是用特殊柔性材料做的:能拉到原来的2倍长再弹回去,弯曲半径比指甲盖还小,贴在机器人的手指、手臂甚至异形外壳上都服服帖帖。
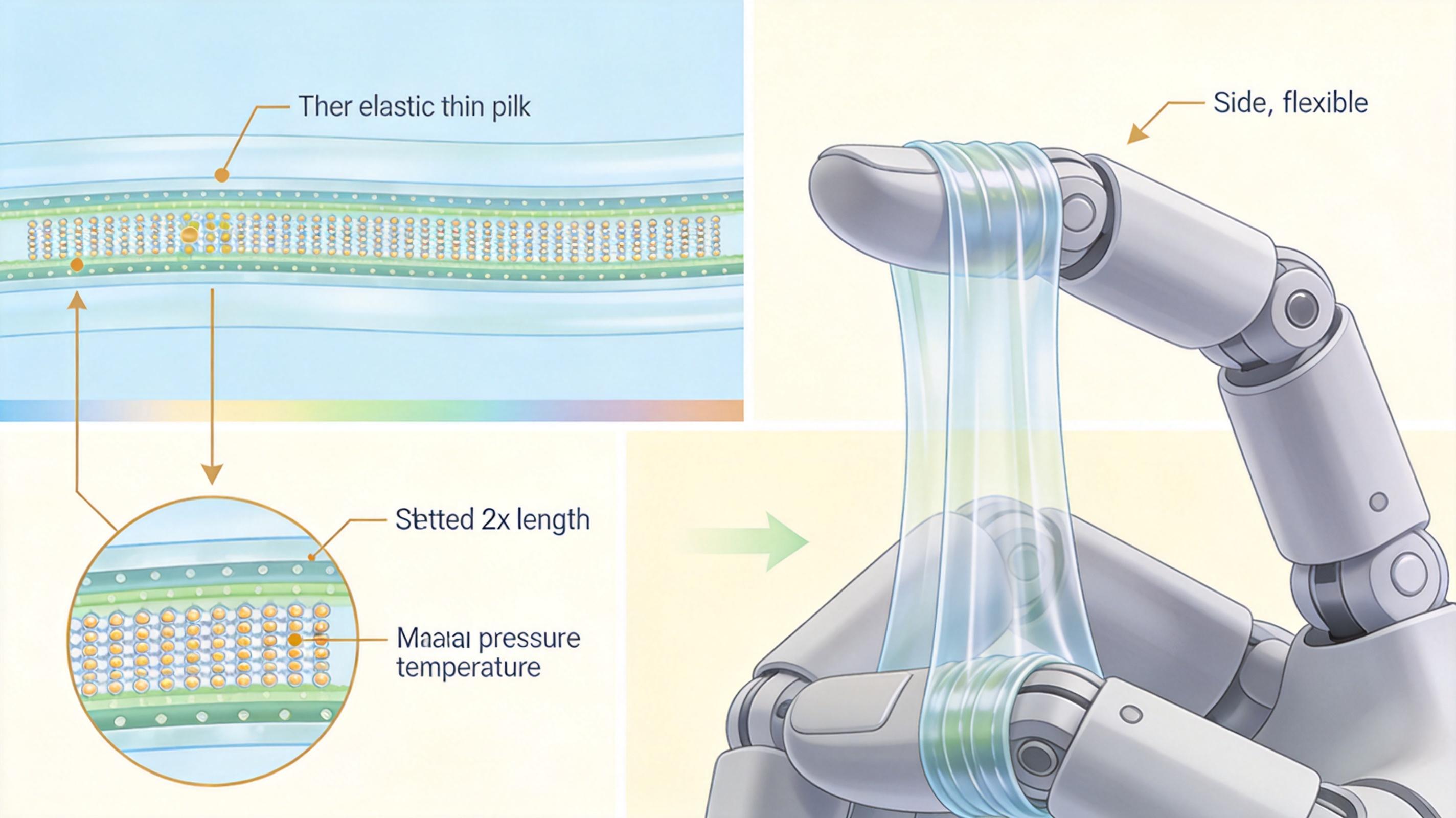
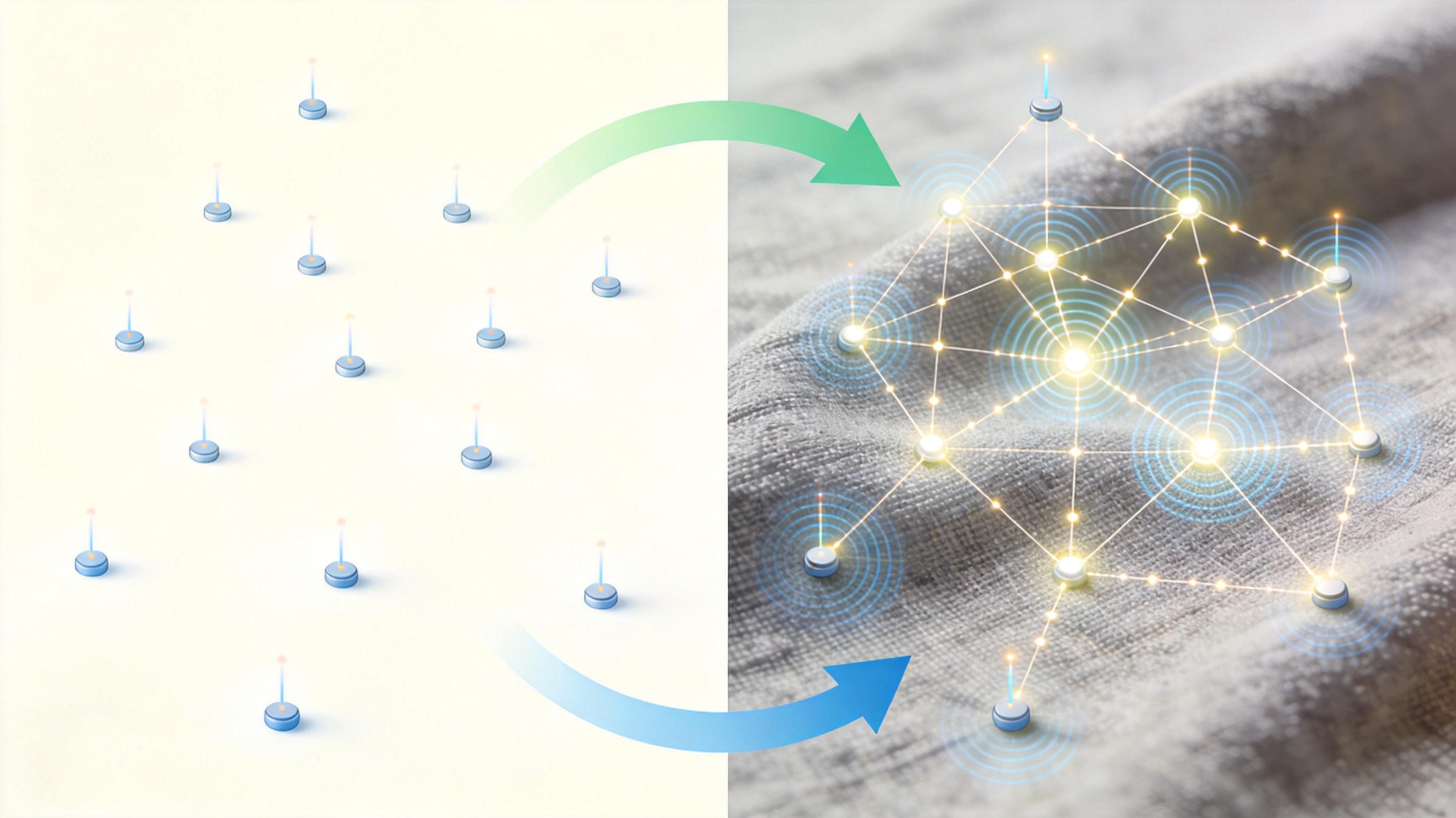
这些传感器的秘密藏在拓扑结构设计里。传统机器人的触觉传感器像一个个孤立的“小点”,只能感知有没有碰到东西;而新的传感器阵列是一张互相连通的“网”,每个点的信号都会和周围的点联动。比如当机器人手指划过布料,传感器能同时捕捉到压力的变化、布料纹理的起伏,甚至滑动的速度——就像你用指尖摸过丝绸和粗麻布的区别。
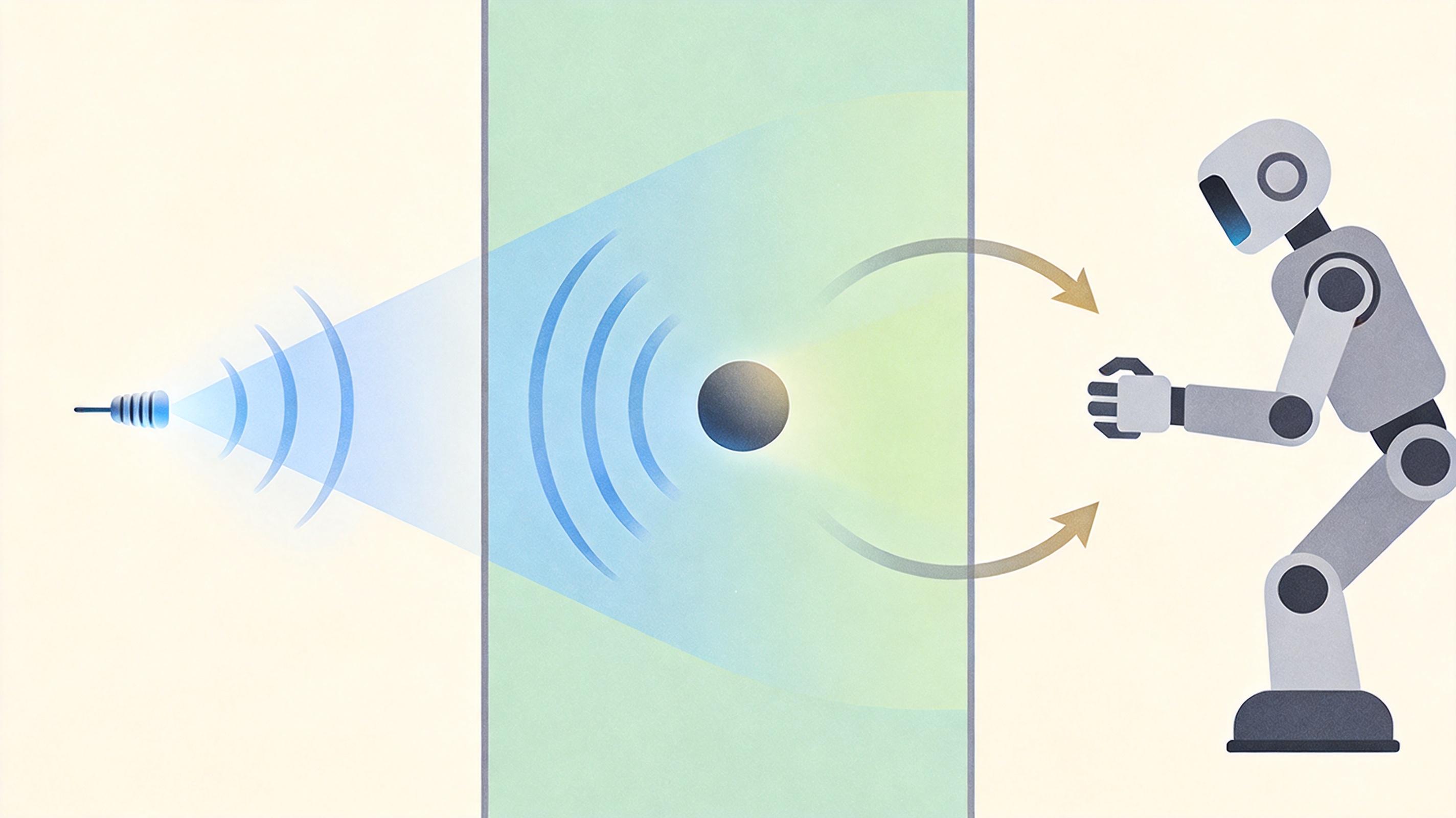
最特别的是“接近觉”能力。它不是靠摄像头,而是靠传感器发出的微弱电场:当物体靠近,电场会发生细微扭曲,传感器能把这种扭曲转化为信号,最远“摸”到20厘米外的东西。这就像给机器人装了一层“触觉预警系统”,还没碰到就能提前调整动作。
过去机器人干活全靠眼睛——摄像头捕捉图像,AI识别物体,然后机械臂按程序抓取。但摄像头有天生的缺陷:透明塑料袋会被当成空气,软塌塌的纸巾会被误判成硬纸板,抓易碎的玻璃杯更是全靠“蒙”。而触觉的加入,给机器人补上了最关键的“认知短板”。
举个例子:机器人抓取一杯水。视觉能告诉它杯子的位置和形状,但触觉会实时反馈:手指用了多大的力?杯子有没有开始滑动?温度是凉的还是热的?当传感器检测到杯子有0.05毫米的滑动,AI会立刻调整抓力,既不会把杯子捏碎,也不会让它滑落。这种“视觉定位+触觉微调”的组合,让机器人的抓取成功率从不到60%跃升到96%以上。
更聪明的是,这些触觉数据还能被存下来。团队开发的触觉手套,能把人类抓取物体的动作、力度、甚至指尖的纹理感知都记录下来,变成机器人的“训练教材”。你戴着手套抓一次鸡蛋,机器人就能学会怎么抓鸡蛋;你摸一次丝绸,机器人就能记住丝绸的触感。这相当于让机器人“站在人类的指尖上”学习,比纯靠算法模拟快得多。
当然,这套“超级皮肤”还没到完美的地步。比如它的耐用性:虽然能拉伸100%,但反复摩擦1万次后,传感器的灵敏度会下降10%左右——这对工业机器人来说,可能意味着几个月就要换一次“皮肤”。还有数据处理的难题:每平方厘米400个传感器,一秒就能产生上万个数据点,机器人得在几毫秒内把这些数据转化为动作指令,对算力的要求极高。
更现实的是成本。目前这种电子皮肤的量产成本还不低,要让每台服务机器人都穿上,还得再等几年。但资本的入场已经在推动变化:团队的自动化产线已经投产,一旦产量上去,成本就能降下来。就像当年的触摸屏,从实验室里的昂贵样品,变成今天每个人口袋里的手机屏幕。
还有一个容易被忽略的问题:机器人的触觉太灵敏了怎么办?如果它能“摸”到人类皮肤的细微压力变化,会不会在和人类协作时,因为过度敏感而停下动作?这需要AI学会“理解”触觉的意义——就像人类知道,握手时用多大的力才合适。
我们总说机器人要“像人一样聪明”,但其实人类的聪明,很多时候不是靠眼睛看,而是靠手摸、靠皮肤感知温度和压力。柔性电子皮肤的意义,不是给机器人装一个更厉害的传感器,而是给它一个“能感知世界的身体”。
触觉,才是机器人理解真实世界的钥匙。当机器人能像人类一样,用指尖去感受一杯水的温度、一块布料的柔软,它就不再是一个执行指令的机器,而是一个能和环境互动的“智能体”。未来的机器人,可能不需要有人类的脸,但一定会有一双能“摸懂”世界的手。