对抗知识焦虑,从看懂这条开始
App 下载
机器人半马跑赢人类,摔倒是必经之路
IMU融合|LiDAR传感器|视觉SLAM|自主导航|双足机器人|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载IMU融合|LiDAR传感器|视觉SLAM|自主导航|双足机器人|具身智能|人工智能
当一台钢铁身躯以每秒7米的速度掠过亦庄的赛道,把人类半马世界纪录甩在身后时,没人再把这场比赛当综艺看。50分26秒的成绩,是去年冠军耗时的三分之一,更是对双足机器人技术的一次硬核验证——300多台来自全球的人形机器,在包含90度弯道、坡道的21公里赛道上,用跌跌撞撞的姿态,试探着人形结构的极限。
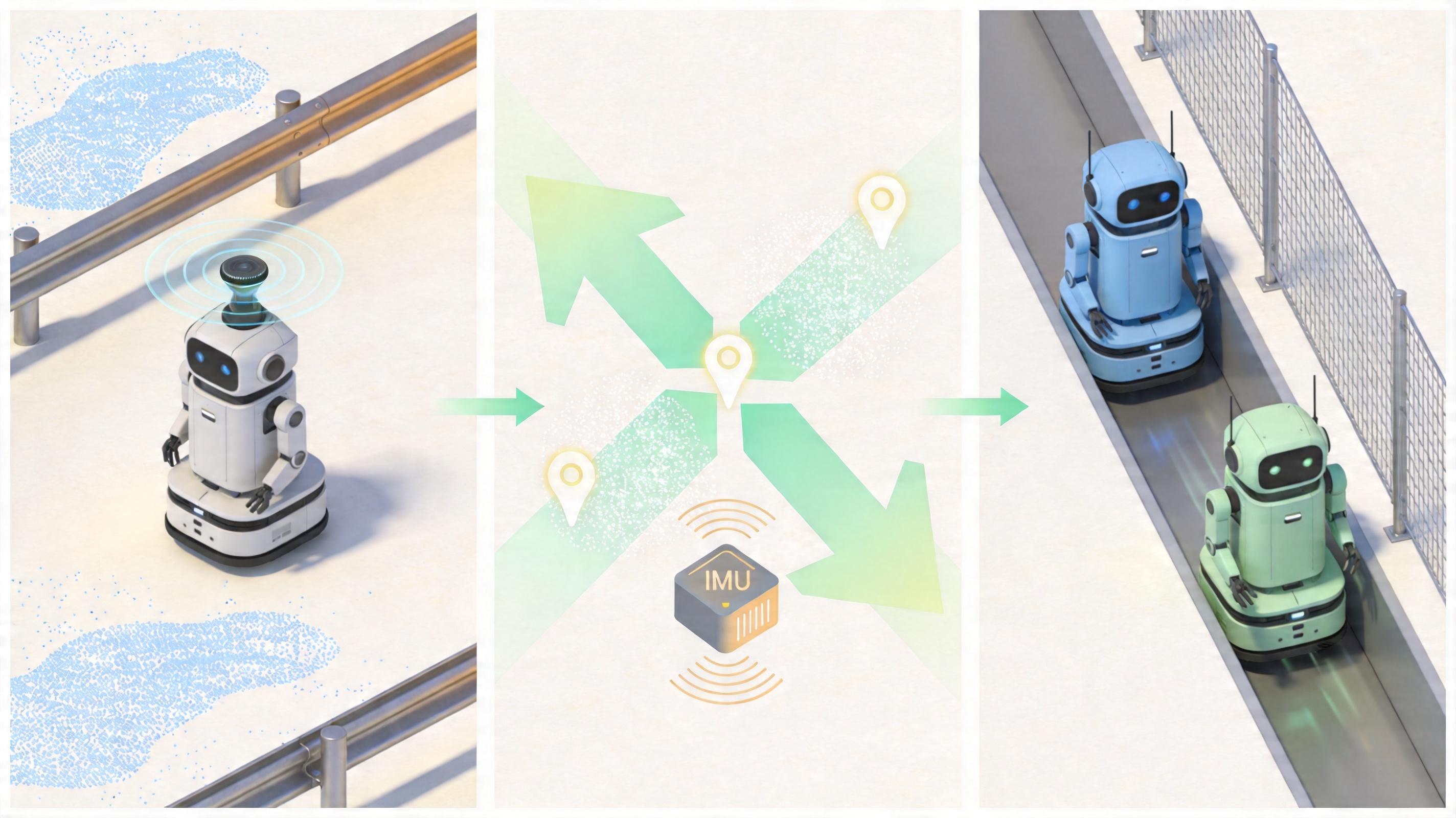
自主导航,是这场比赛里最沉默的技术核心。约40%的参赛机器人要完全依靠自己的传感器判断路况:LiDAR扫过路边的护栏生成点云地图,视觉SLAM校正定位漂移,IMU实时计算身体姿态——这些数据要在1毫秒内完成融合,才能让机器人在狭窄的超越通道里避开同伴,或是在突然出现的坡道前调整步幅。但仍有机器人会突然刹停、贴向围栏,就像刚学走路的孩子分不清路的边界——复杂环境里的传感器噪声、地形起伏带来的振动,依然是导航系统躲不开的盲区。
动态平衡,则是支撑机器人跑完全程的隐形骨架。不同于轮式机器人的天生稳定,双足人形机器人的每一步都像在控制一个高维倒立摆:要通过层级优化算法,把保持平衡这个最高优先级任务,拆解成20多个关节的力矩调整,哪怕地面有1度的倾斜,都要重新计算质心位置。为了抵消关节摩擦带来的误差,工程师们给机器人的关节加上了自适应补偿模型,就像给机械关节抹上了一层「智能润滑油」,让它在高速奔跑时不会因为卡顿摔倒。但赛道上还是随处可见机器人扑地的身影——当身体的惯性超过算法的响应速度,或是遇到未被训练过的地形扰动,再精密的控制也敌不过现实的意外。
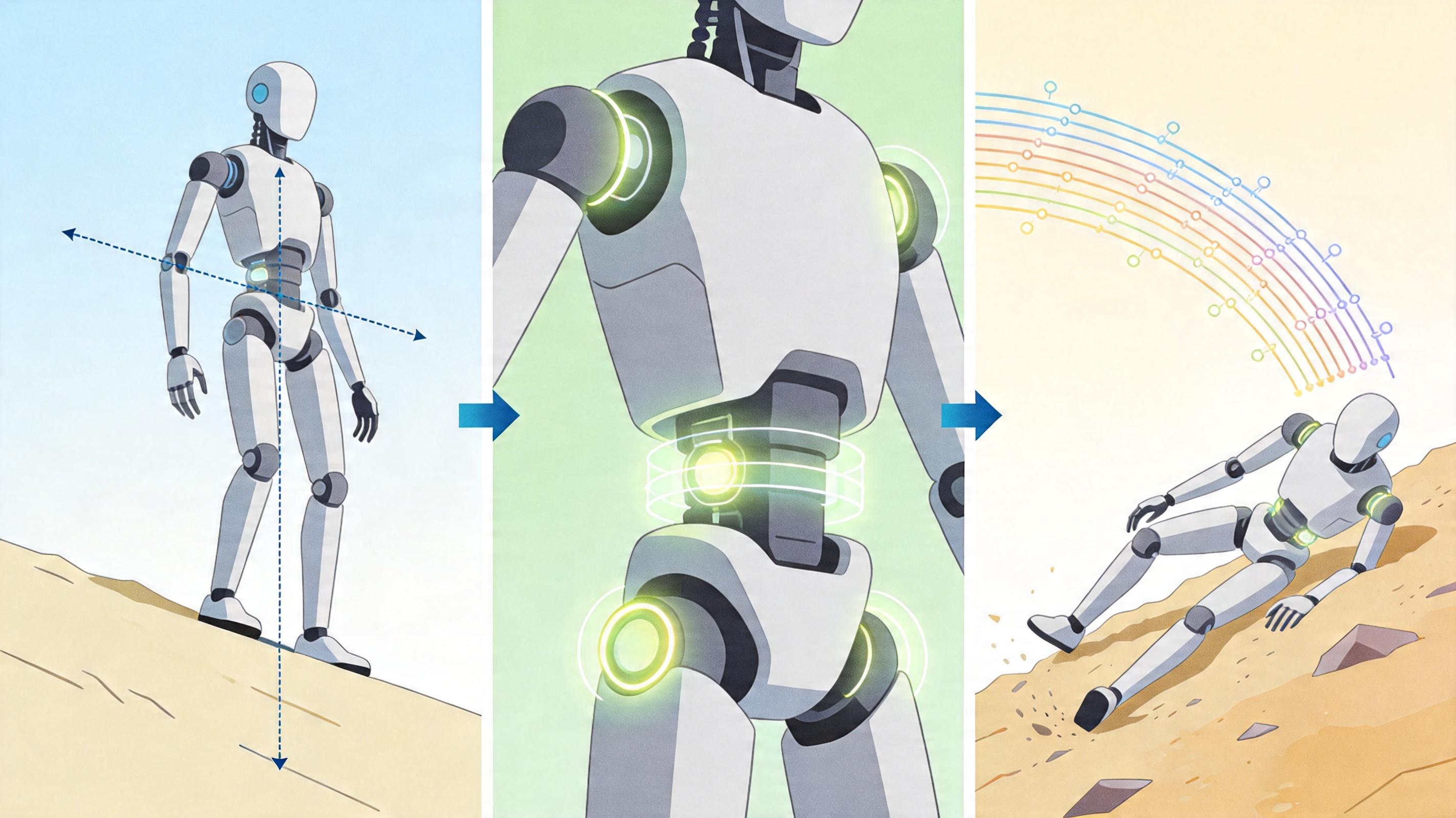
这些摔倒的瞬间,恰恰是人形机器人必须走的弯路。我们执着于让机器人长成人类的样子,本质上是因为人类社会的每一寸空间——楼梯、门把手、操作台面——都是为双足直立的形态设计的。轮式机器人能跑得更快,却爬不上楼梯;履带式机器人能适应地形,却钻不进狭窄的走廊。人形结构的优势,从来不是速度,而是对人类环境的天然适配性。就像比赛里那些摔倒后又颤巍巍爬起来的机器人,笨拙,却在贴近我们的生活场景。
现在的人形机器人,就像刚学会跑步的少年:能以惊人的速度冲刺,却还会被小石子绊倒;能精准规划路线,却还看不懂复杂的社交场景。它们的续航只有2到4小时,传感器在强光下会失灵,复杂环境里的自主决策能力还远不如一个三岁的孩子。但这场半马比赛已经证明,当算法、传感器和机械结构终于磨合到能支撑21公里的奔跑,距离它们走进工厂、走进家庭的那天,就又近了一步。
未来的某一天,当你在医院里看到机器人推着轮椅,在工厂里看到机器人拿起扳手,它们或许不会再像今天这样频繁摔倒,但请记得,亦庄赛道上那些跌跌撞撞的钢铁身影,是它们走向人类世界的第一程。