对抗知识焦虑,从看懂这条开始
App 下载
自动驾驶认不出新物体?双曲空间给了新思路
未知障碍识别|物体家族树|双曲空间|博世|弗莱堡大学|自动驾驶|人工智能
对抗知识焦虑,从看懂这条开始
App 下载未知障碍识别|物体家族树|双曲空间|博世|弗莱堡大学|自动驾驶|人工智能
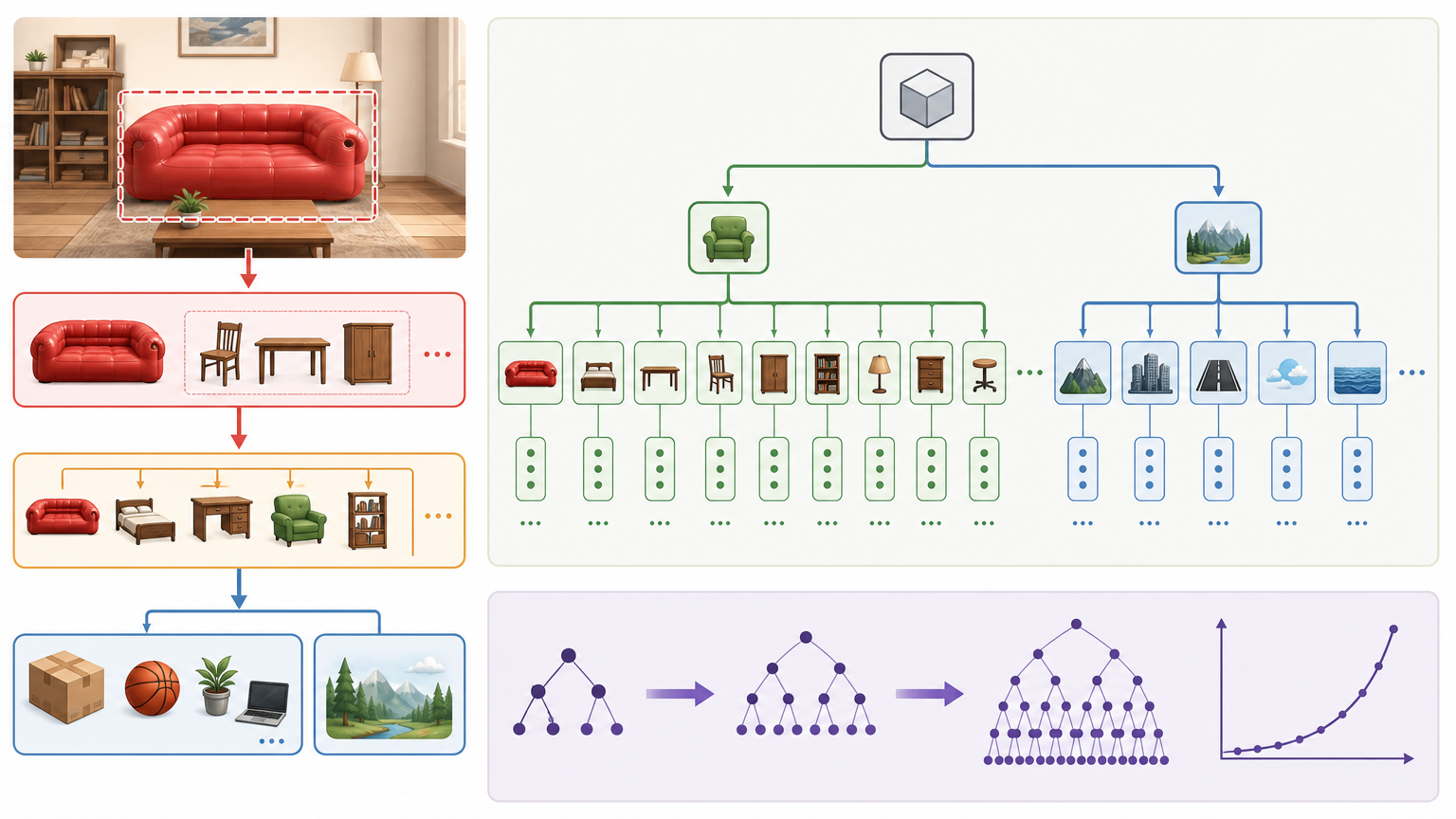
想象你坐在自动驾驶车里,前方突然滚来一个训练数据里从未出现过的充气沙发——这不是玩笑,是真实道路上随时可能发生的场景。此前的AI要么把它当背景直接忽略,要么乱归类成“纸箱”“石块”,两种情况都可能引发事故。2026年5月,弗莱堡大学与博世的团队用一个反直觉的方法解决了这个难题:不让AI死记硬背见过的物体,而是让它学会“物体家族树”,在双曲空间里用层级推理认出未知障碍。
你可以把AI的识别系统想象成一个文件柜:传统方法是把每个物体类别当成独立的文件夹,“猫”“狗”“汽车”各占一格,遇到没见过的“充气沙发”,系统根本找不到对应的格子,要么扔去垃圾桶,要么硬塞进某个看起来像的文件夹。
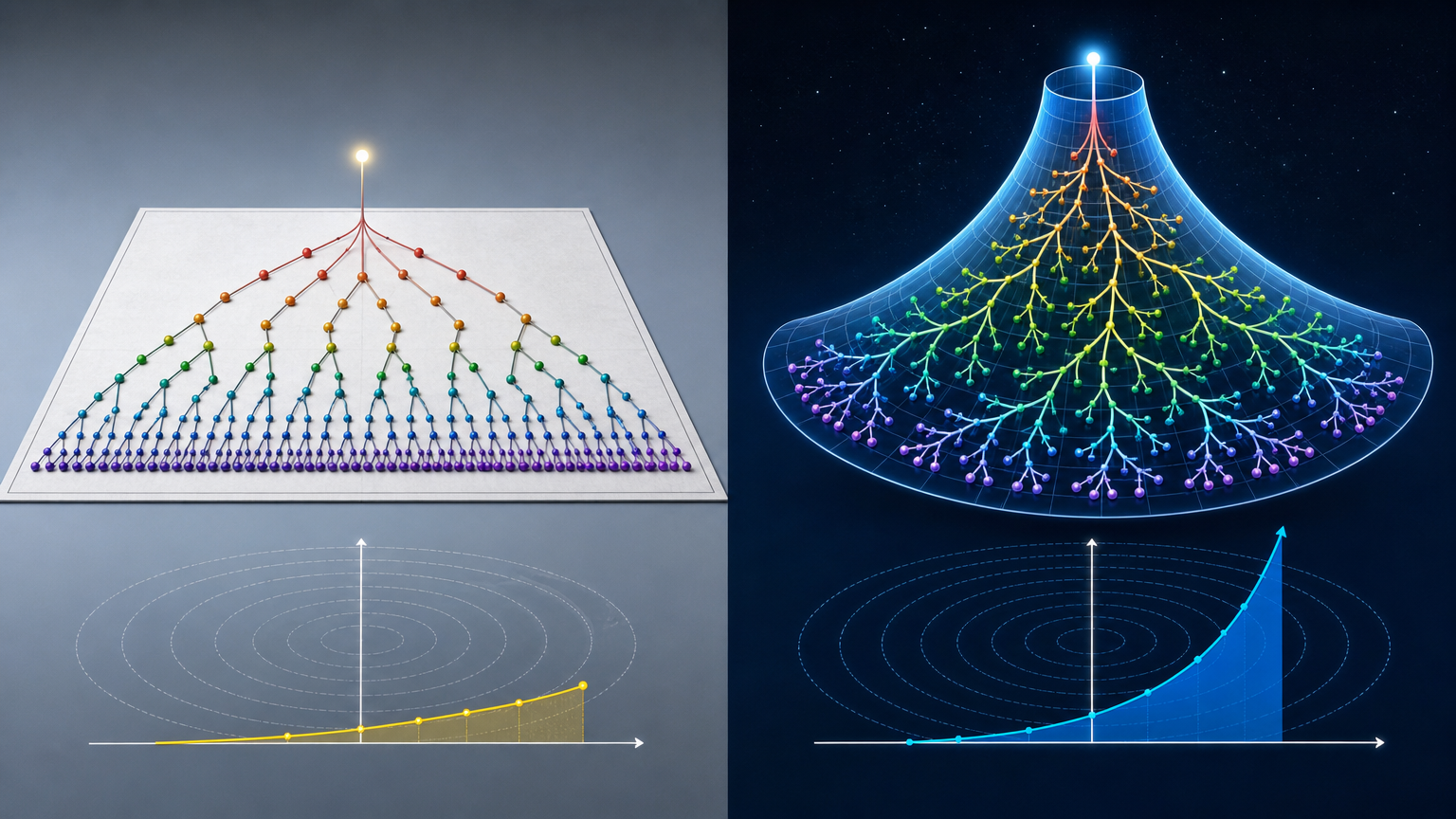
但真实世界的物体是有层级的:“充气沙发”属于“家具”,“家具”属于“物体”,“物体”和“背景”是完全不同的分支。这种树状结构的节点数量是指数级增长的——“物体”下有10个大类,每个大类下又有10个小类,就会有100个小类。
我们熟悉的欧氏空间是“平坦”的,它的体积随半径多项式增长,就像一张A4纸,画一棵10层的树,越到后面枝干越挤,最后只能扭曲重叠。而双曲空间是负曲率的,像一个无限张开的喇叭,体积随半径指数增长,刚好能把指数级扩张的“物体家族树”舒舒服服地装进去,每个分支都有足够的空间。
Hyp2Former的核心逻辑很简单:先在双曲空间里给已知物体建一棵“家族树”,让AI明白“狗→动物→物体”的层级关系;然后训练AI,遇到新物体时,先判断它属于哪个大分支——是“物体”还是“背景”,再看它靠近哪个大类的锚点,最后确定这是一个需要注意的未知障碍。
具体操作分两步:
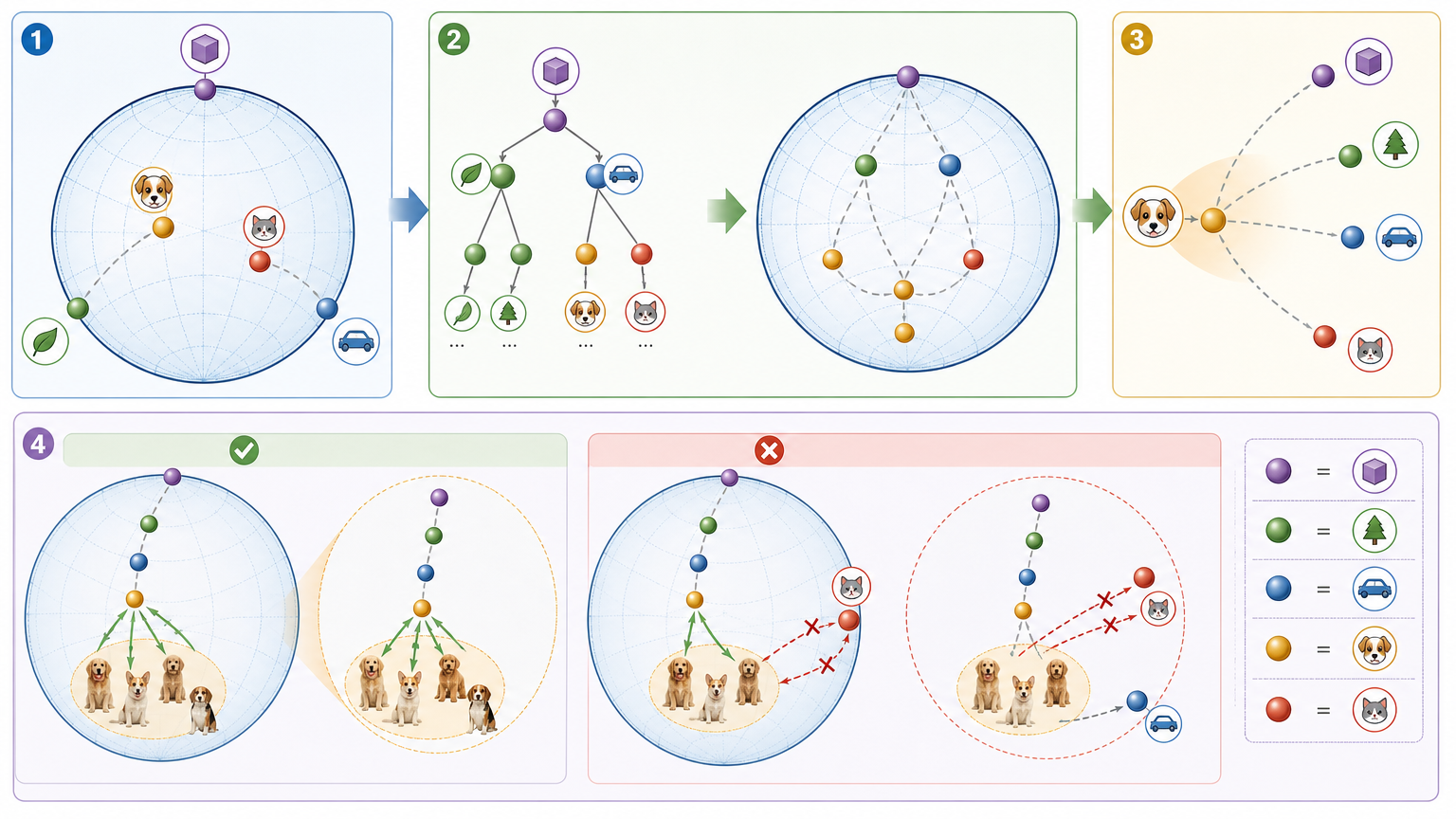
这种方法不需要额外的未知物体数据,也不用事后聚类,未知物体直接从层级结构里“长”出来。
在Cityscapes、Lost&Found和MS COCO三个数据集上的测试显示,Hyp2Former的表现远超此前的最优模型:在Cityscapes上训练后直接测试真实道路的Lost&Found数据集,未知物体的全景质量(PQ)达到12.15%,比第二名P2F高出0.93个百分点;更关键的是,它在识别未知物体的同时,已知物体的识别性能几乎没下降——从封闭世界到开放世界,PQ仅下降5.29%,而P2F的降幅高达14.15%。
但它也有局限:目前的层级树需要人工预定义,遇到完全超出现有层级的“外星物体”,系统可能失效;推理速度约6.5 FPS,距离自动驾驶需要的30 FPS实时性还有差距;双曲空间的曲率参数需要手动调优,不同数据集的最优参数不同,自动化程度还不够。
从“见过才会认”到“推理就能懂”,Hyp2Former的突破不在于识别了多少种新物体,而在于它给AI装上了“抽象思考”的框架——这和人类认识世界的方式不谋而合:我们不需要见过所有种类的狗,只要知道“狗是动物,动物是活的,活的会动”,就能认出从未见过的品种。
更值得关注的是,双曲空间的应用不止于自动驾驶,在知识图谱、自然语言处理等需要层级推理的领域,它都可能带来效率的飞跃。毕竟,智能的本质从来不是记忆,而是用有限的知识理解无限的世界。
结构化知识,才是智能真正的飞跃。