对抗知识焦虑,从看懂这条开始
App 下载
机器人不做人形,却摸到了通用智能的门
订单规模|批量量产|智能进化路线|写字楼清洁|非人形机器人|AI智能体|人工智能
对抗知识焦虑,从看懂这条开始
App 下载订单规模|批量量产|智能进化路线|写字楼清洁|非人形机器人|AI智能体|人工智能
当我们还在期待人形机器人像科幻片里那样做家务时,一群工程师已经悄悄换了赛道:他们放弃模仿人类外形,转而让机器人钻进写字楼的茶水间、商场的储物间、酒店的客房——就做整理和清洁这两件事,却让机器人单月稳定量产百台,订单突破亿元。更重要的是,他们提出了一套完全反直觉的路线:先“放弃通用”,才能真正走向“通用智能”。这到底是偷懒,还是摸到了智能进化的真实逻辑?
你可以把当前的机器人智能想象成一个刚学做饭的新手:在实验室的“完美厨房”里,它能精准复刻出番茄炒蛋,但换个家里的普通灶台,就可能把盐当成糖——这就是所谓的“伪通用”,看起来会很多,实则只是在特定环境下的“表演”。
而“去通用”的思路,是让这个新手先专注做番茄炒蛋:不去学满汉全席,就在普通家庭的灶台上练,练到不管火大火小、锅粘锅滑,都能把蛋炒得蓬松、盐放得刚好。这个阶段的机器人,不再追求“什么都能做”,而是在真实的商业场景里,用极高的稳定性解决具体问题——比如在写字楼里整理会议桌,不管杯子摆得歪还是文件堆得乱,都能归置得整整齐齐。
这个过程中,机器人会积累大量真实场景的“失败经验”:杯子倒了怎么扶、文件滑了怎么捡,这些数据不是实验室里能模拟出来的。而正是这些带着“烟火气”的数据,成了通向真通用的铺路石。
要实现“去通用”的稳定性,核心是解决机器人在复杂环境里的反应速度问题。传统的机器人系统是“串行工作”:先看清楚环境,再思考怎么做,最后动手——就像我们先把题目读完,再想解法,最后写答案,遇到突发状况就会手忙脚乱。
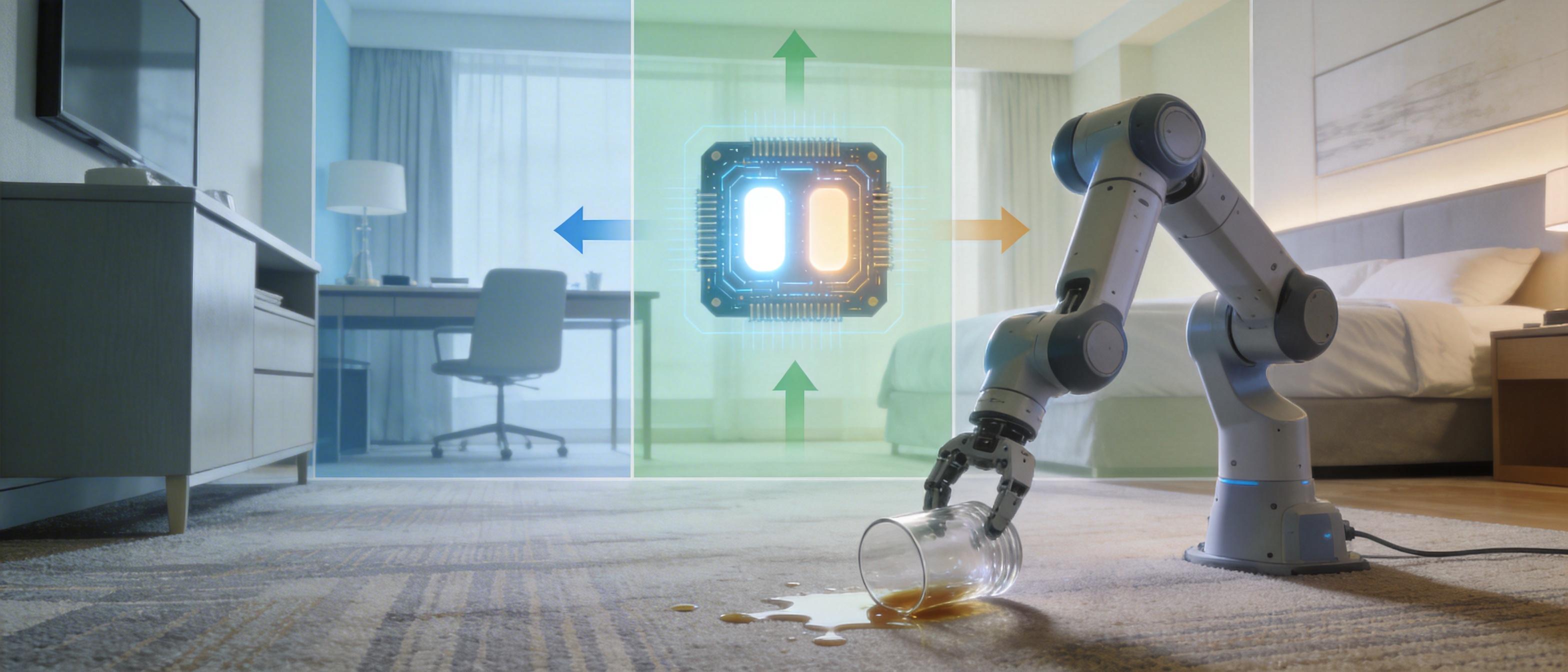
而类脑双流异步执行架构,相当于给机器人装了两个大脑:一个“快脑”负责本能反应,比如看到杯子要倒,先伸手扶住再说;另一个“慢脑”负责深度思考,比如整理桌子时,规划先收文件还是先摆杯子。两个大脑同时工作,不用等“慢脑”想清楚,“快脑”已经处理了紧急情况。
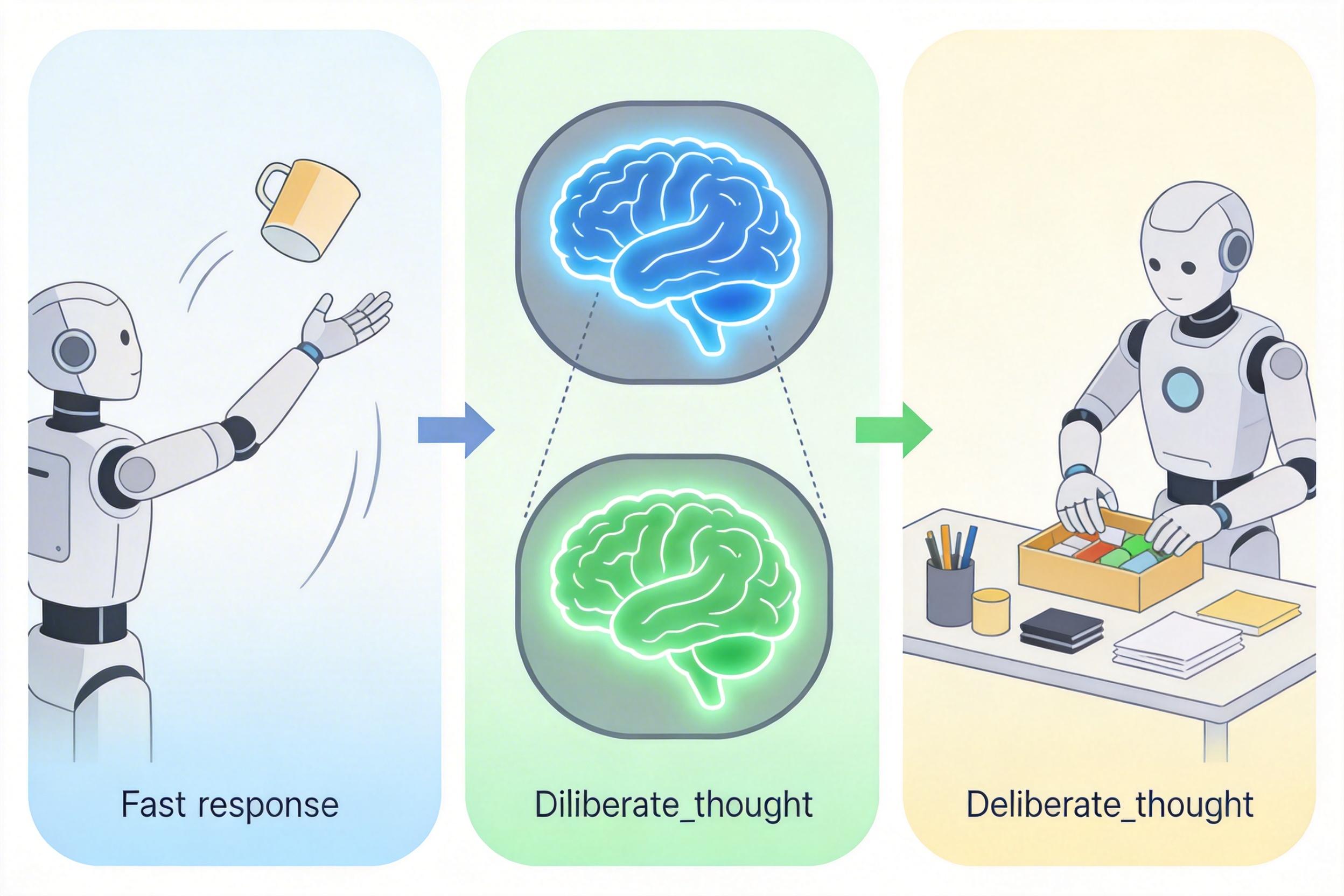
举个具体的例子:当机器人在酒店客房整理时,突然发现地毯上有个水杯倒了,“快脑”会立刻控制机械臂把杯子扶稳,同时“慢脑”已经在规划接下来怎么擦干水渍、把杯子放回桌面——整个过程像人一样自然,不会出现“愣在原地思考”的尴尬。
更关键的是,这种架构能让机器人把在整理场景里练出来的“稳”,迁移到其他场景:比如从整理会议桌,到整理医院的药品架,只需要调整“慢脑”的规划逻辑,“快脑”的应急反应能力是通用的。
但这条路并非坦途。首先是数据的挑战:真实场景的数据不像实验室那样干净,杯子有圆的方的、文件有厚的薄的,甚至还有客人遗落的奇怪物品,要让机器人学会处理这些“意外”,需要的不是更多数据,而是更“杂”的数据——这意味着要在更多真实场景里试错,成本极高。
其次是硬件的平衡:要让机器人既能精准抓起一个回形针,又能搬起一箱矿泉水,机械臂的灵活性和耐用性是矛盾的——灵活的关节容易坏,结实的关节又不够巧。目前的解决方案是“场景定制硬件”:整理场景用更灵巧的手,清洁场景用更有力的臂,但这又和“通用”的目标产生了张力。
最后是安全的底线:当机器人在写字楼里和人擦肩而过,或者在医院里靠近病人,它的每一个动作都不能出错。这需要机器人能实时感知“人在哪里”“动作会不会碰到人”,而不是只盯着自己要做的任务——这种“环境感知优先级”,是当前技术还需要打磨的细节。
我们总以为通用智能是“什么都能做”,但这群工程师用实践证明:通用智能的起点,是“把一件事做透”。就像人类的智能进化,不是先学会所有技能,而是先学会用手抓东西、用脚走路,再一步步拓展能力边界。
“先扎根场景,再生长智能”——这不仅是机器人的进化逻辑,也是所有技术落地的真实路径。当我们不再执着于让机器人“像人一样”,而是让它“像人一样学习”,通用智能的大门,反而离我们更近了一步。