对抗知识焦虑,从看懂这条开始
App 下载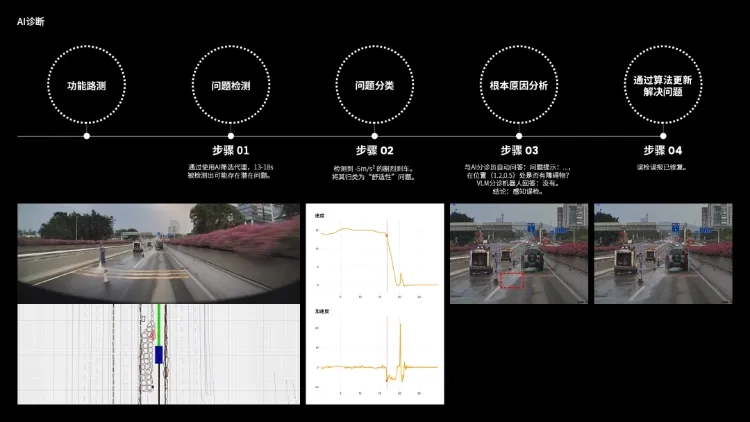
自动驾驶不用堆数据了?仿真平台造出训练黄金
极端驾驶场景|端到端模型|虚拟训练|仿真平台|自动驾驶|人工智能
对抗知识焦虑,从看懂这条开始
App 下载极端驾驶场景|端到端模型|虚拟训练|仿真平台|自动驾驶|人工智能
当行业大佬们忙着喊“终局已定”时,一家自动驾驶公司悄悄把百万公里路测压缩成了几天的虚拟训练。过去车企要从数百万辆车的海量数据里,像在矿石堆里人工挑钻石一样找有用的训练素材,现在他们用一个平台就能“合成钻石”——按需生成暴雨天加塞、路口突然窜出电动车这些极端场景。这不是科幻,是2026年自动驾驶行业正在发生的技术革命:一段式端到端模型,正靠着仿真平台突破数据瓶颈,重新定义行业的竞争规则。
你可以把传统自动驾驶系统想象成一支分工明确的车队:有人负责看路(感知),有人负责预判其他车的动作(预测),有人负责规划路线(规划),最后有人踩油门刹车(控制)。每个环节都靠工程师写好的规则衔接,就像给每个队员发了一本操作手册。但手册里永远写不完所有突发情况——比如路口突然窜出的猫、暴雨天被淹的标线,这些“长尾场景”成了系统的致命盲区。
一段式端到端模型则是把整个车队换成了一个经验老道的司机:他用眼睛(传感器)直接看路,不用翻手册,瞬间就能做出踩刹车还是打方向的决策。这个模型靠神经网络从数据里学驾驶经验,数据越多样,它应对复杂情况的能力就越强。但问题是,现实中哪来那么多极端场景的数据?总不能为了训练,专门去等暴雨天的加塞吧?
这就是GENESIS这类仿真平台的价值——它像一个超逼真的驾驶游戏编辑器,只不过里面的每辆车、每个行人都像真人一样会“思考”。它能在几分钟内生成一个虚拟城市,模拟出暴雨、强光、积雪等各种天气,还能让其他车辆做出突然加塞、违规占道这些充满“人性”的操作。更关键的是,这些场景完全符合物理规律:雪会在车轮下打滑,强光会让摄像头出现眩光,就像在真实世界里发生的一样。

过去要收集1000次加塞场景的数据,可能需要跑几百万公里的路;现在用仿真平台,一天就能生成上万次。而且它还能自动诊断模型的问题:比如模型在某个路口总是刹车过晚,平台会反复生成类似场景,直到模型学会正确应对。这种“虚拟训练-真实验证”的闭环,把研发周期从几年压缩到了几个月。
很多人担心端到端模型是个“黑箱”——不知道它为什么做出某个决策,万一它“犯糊涂”怎么办?其实这个问题早有解法:现在的模型已经能结合大语言模型,用自然语言解释自己的决策,比如“前方车辆突然变道,我选择减速避让”。而且仿真平台会反复测试模型的“底线”,把那些可能导致危险的“幻觉”场景找出来,让模型反复学习纠正。
更重要的是,端到端模型的“驾驶水平”正在向L4级Robotaxi看齐。那些坐过纯无人Robotaxi的工程师,会把L4级的安全标准带到辅助驾驶系统里——比如要求系统在极端场景下不仅要避免事故,还要像老司机一样平稳处理。这种“用L4的标准做L2++”的思路,正在让辅助驾驶从“勉强能用”向“真正可靠”升级。
当行业里的领先者喊着“终局已定”时,技术的迭代其实才刚刚开始。过去我们以为自动驾驶的竞争是比谁的路测里程更长、谁的传感器更多,现在才发现,真正的核心是比谁能更高效地“制造经验”。
数据不是自动驾驶的壁垒,制造高质量数据的能力才是。那些能把虚拟场景变成训练黄金的公司,正在悄悄改写游戏规则——毕竟,当别人还在矿石堆里挑钻石时,你已经能按需合成钻石,这场比赛的胜负其实早就有了伏笔。