对抗知识焦虑,从看懂这条开始
App 下载
每月烧3亿赌AI,小鹏跳过L3直奔L4
L4级别自动驾驶|AI大模型|高精地图|VLA智驾系统|小鹏汽车|自动驾驶|人工智能
对抗知识焦虑,从看懂这条开始
App 下载L4级别自动驾驶|AI大模型|高精地图|VLA智驾系统|小鹏汽车|自动驾驶|人工智能
广州街头,一辆没有高精地图依赖的小鹏汽车遇到了导航没更新的施工封路。它没有像传统智驾那样卡壳,而是原地停顿14秒——不是系统死机,是在“思考”。14秒后,它自行左转绕行,还同步更新了导航路线。
这不是实验室里的Demo,是即将推送给车主的第二代VLA智驾系统。为了这套完全抛弃规则、用AI重构驾驶逻辑的架构,小鹏过去十几个月每月烧掉3亿,把所有鸡蛋放进了同一个篮子。他们赌的,是从L2直接跳到L4的技术野望——而这场豪赌的底牌,藏在AI大模型的泛化能力里。
传统智驾系统像个背熟了剧本的演员:工程师提前写好10万条规则,遇到什么场景做什么动作,一旦碰到剧本里没有的“即兴环节”就会手足无措。而小鹏的第二代VLA(视觉-语言-动作模型),是直接让AI从1亿段真实驾驶数据里学会开车——就像人类通过练车和上路经验掌握驾驶技巧,而不是死记交通规则。
你可以把这套系统理解成:用一个720亿参数的超级大脑,直接把摄像头看到的画面转化为方向盘、油门的动作指令,跳过了传统架构里“识别场景-匹配规则-执行动作”的中间环节。它不需要高精地图标注每一条车道线,也不需要工程师提前定义“遇到施工该怎么绕”,而是能像老司机一样,根据眼前的画面自己判断:路被挡了,左边有空隙,应该转过去。
这套系统的核心是“泛化能力”——它能处理没见过的场景。比如遇到马路上突然出现的儿童,它会像人类一样先减速再观察,而不是只会触发预设的紧急制动。当然,小鹏团队也坦言,目前的减速度还不够快,他们还在优化这个“救命的反应时间”。
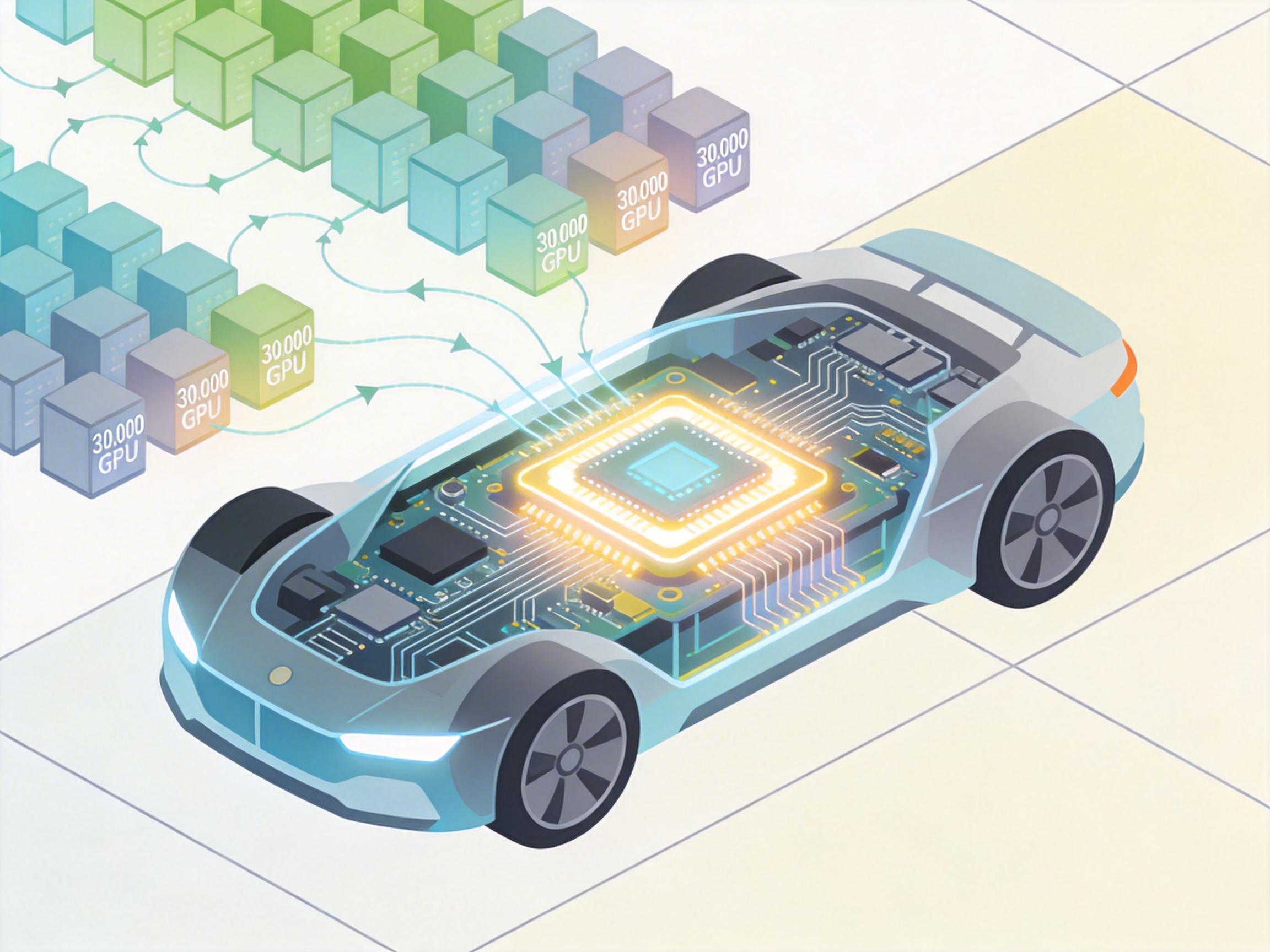
每月3亿的投入,不是砸给了单一的算法,而是一套从芯片到数据闭环的全栈体系。小鹏自研的图灵芯片,算力达到2250 TOPS,专门为车载大模型优化;他们还搭了3万张GPU的云端集群,每5天就能完成一次模型迭代——这意味着系统每天都在“练车”,每天都在变聪明。
最关键的是数据闭环。小鹏的智驾系统每跑一公里,都会产生驾驶数据,这些数据被传回云端,用来训练和优化模型。比如遇到施工路段的14秒思考,这个场景会被记录下来,让模型学习“下次遇到类似情况该更快做出判断”。这种“开车-收集数据-优化模型-再开车”的循环,让系统的能力像滚雪球一样越来越强。
我认为,小鹏的豪赌本质上是在抢时间。当其他车企还在L3的规则里纠结“什么时候该把控制权还给人类”,小鹏直接跳过了这个需要在硬件、软件、法规上妥协的阶段,直奔L4的目标:让车自己解决所有问题,不用把难题甩给用户。
小鹏的目标不止于自动驾驶。何小鹏在直播里说,VLA技术同样会用在机器人上——很快就能看到小鹏的机器人坐、站、跳、跨栏。这背后的逻辑是:VLA本质上是一个“物理世界大模型”,它能处理视觉信息,理解语言指令,输出动作控制,不管载体是汽车还是机器人。
未来的小鹏汽车,会更像一个超级智能体:它能自己开车,能理解你说的“去公司顺便买杯咖啡”,能根据你的驾驶习惯调整座椅和空调,甚至能在你疲惫的时候主动接管驾驶。这种跨域融合的能力,才是小鹏真正的壁垒——不是某一项技术领先,而是整个AI生态的协同。
当然,挑战也很明显。L4级自动驾驶需要系统的故障率低于10^-8/小时,相当于万年才出一次故障,这对系统的可靠性要求极高;而且法规和公众的接受度也需要时间。但小鹏已经用行动表明:他们愿意先把技术做出来,再等待规则跟上。
当小鹏的车主在3月19日收到VLA系统的推送时,他们摸到的可能不只是一套新的智驾功能,而是自动驾驶的下一个时代。
过去我们总觉得,自动驾驶的进化是循序渐进的:从L1到L2,再到L3、L4。但小鹏用3亿每月的投入证明,技术的突破有时候需要跳级——当AI大模型的泛化能力足够强,跳过中间的过渡阶段,直接奔向终极目标反而更高效。
真正的智能驾驶,是让车学会像人一样思考。 而小鹏这场豪赌的结果,不仅会决定他们自己的未来,也会改写整个自动驾驶行业的游戏规则。毕竟,在技术的赛道上,有时候不是谁走得稳,而是谁敢先跑起来。