对抗知识焦虑,从看懂这条开始
App 下载
机器人不用换系统,跨形态自主作业成真
自主决策逻辑|多旋翼无人机|四足机器人|统一自主堆栈|挪威科技大学|AI智能体|人工智能
对抗知识焦虑,从看懂这条开始
App 下载自主决策逻辑|多旋翼无人机|四足机器人|统一自主堆栈|挪威科技大学|AI智能体|人工智能
想象这样的场景:矿井里的四足机器人刚完成管道巡检,指令一来,它的数据直接同步给空中的多旋翼无人机,后者立刻循着同样的路径展开高空测绘——两台形态完全不同的机器人,共用一套自主决策逻辑,甚至不需要重新调试。这不是科幻片的镜头,而是挪威科技大学团队2026年5月推出的「统一自主堆栈」已经实现的能力。过去每类机器人都要定制专属的感知和规划系统,为什么这套架构能打破形态壁垒?
你可以把机器人的自主系统理解成一套「操作系统」——过去无人机用Windows,四足机器人用Mac,彼此的数据和指令完全不兼容。而挪威科技大学的这套架构,相当于打造了一个能适配所有硬件的「机器人通用OS」。
它的核心是三大模块的闭环协同:首先是多模态感知,融合激光雷达、雷达、视觉相机和惯性测量单元的数据——就像同时用眼睛看、耳朵听、皮肤感知震动,再加上平衡感,哪怕在烟雾弥漫的矿井、信号全失的船舱,也能精准定位环境;接着是多行为规划,用基于采样的图规划方法,既能处理无人机的高速导航,也能适配四足机器人的复杂地形行走;最后是多层安全机制,从地图避障到深度学习动态调整,再到控制屏障函数的最后防线,把碰撞风险降到最低。
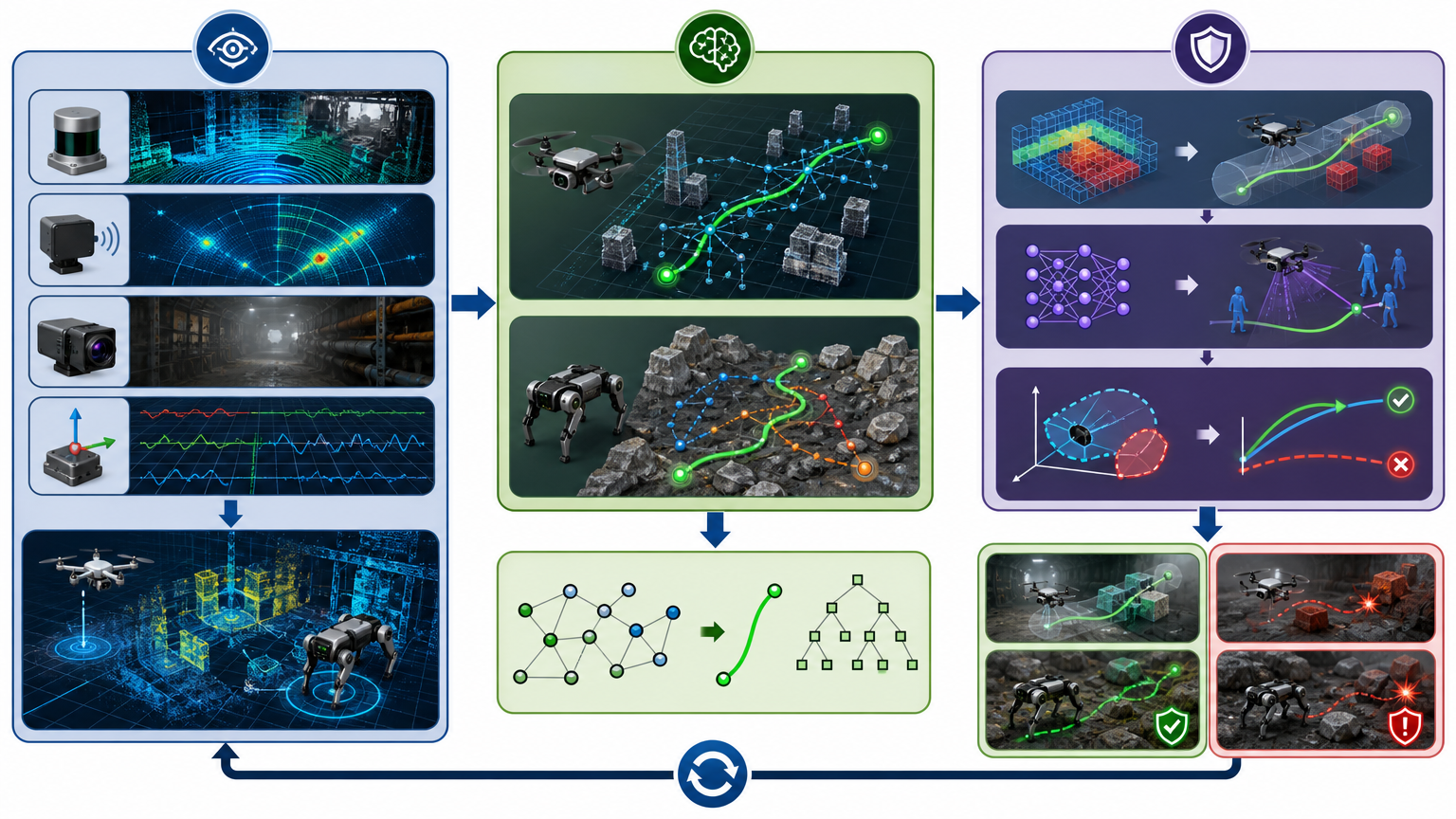
更关键的是,这套系统完全开源,还配套了集成所有传感器的UniPilot硬件平台——开发者不需要再从零搭建感知框架,直接就能在无人机、四足机器人甚至水下机器人上部署测试。
实验室里的完美数据不算数,能在极端环境里干活才是真本事。
在挪威北部的一座地下矿井,四足机器人靠着这套系统,在没有GPS信号、能见度不足5米的巷道里,连续自主行走了3.2公里,精准避开了掉落的岩石和狭窄的管道接口;在一艘停港的货船舱内,多旋翼无人机完成了全舱的结构检测,识别出3处焊缝裂纹——这些场景里,人类操作员只需要给出「巡检」的指令,剩下的路径规划、避障、目标识别全由机器人自主完成。

它甚至能应对感知退化的极端情况:当视觉相机被烟雾遮挡,系统会自动切换到雷达和激光雷达的数据,保持定位精度不下降;当激光雷达被粉尘覆盖,惯性测量单元的高频数据会补上缺口。这种「东方不亮西方亮」的多模态融合,正是它能在真实场景里站稳脚跟的关键。
但它也有局限:目前对水下机器人的适配还在测试阶段,面对强水流的干扰,姿态控制的稳定性还有待提升;而且系统的计算功耗不低,小型机器人搭载时会影响续航时间。
这套架构的意义,不止是让机器人跨形态作业,更是重构了工业自动化的成本模型。
过去企业引入机器人,光是定制适配不同场景的自主系统,成本就能占到总投入的30%以上,而且换一种机器人就要重新开发。现在有了统一堆栈,企业可以用同一套系统管理仓库的AGV小车、车间的机械臂和野外的巡检机器人,调试成本直接降低了60%。
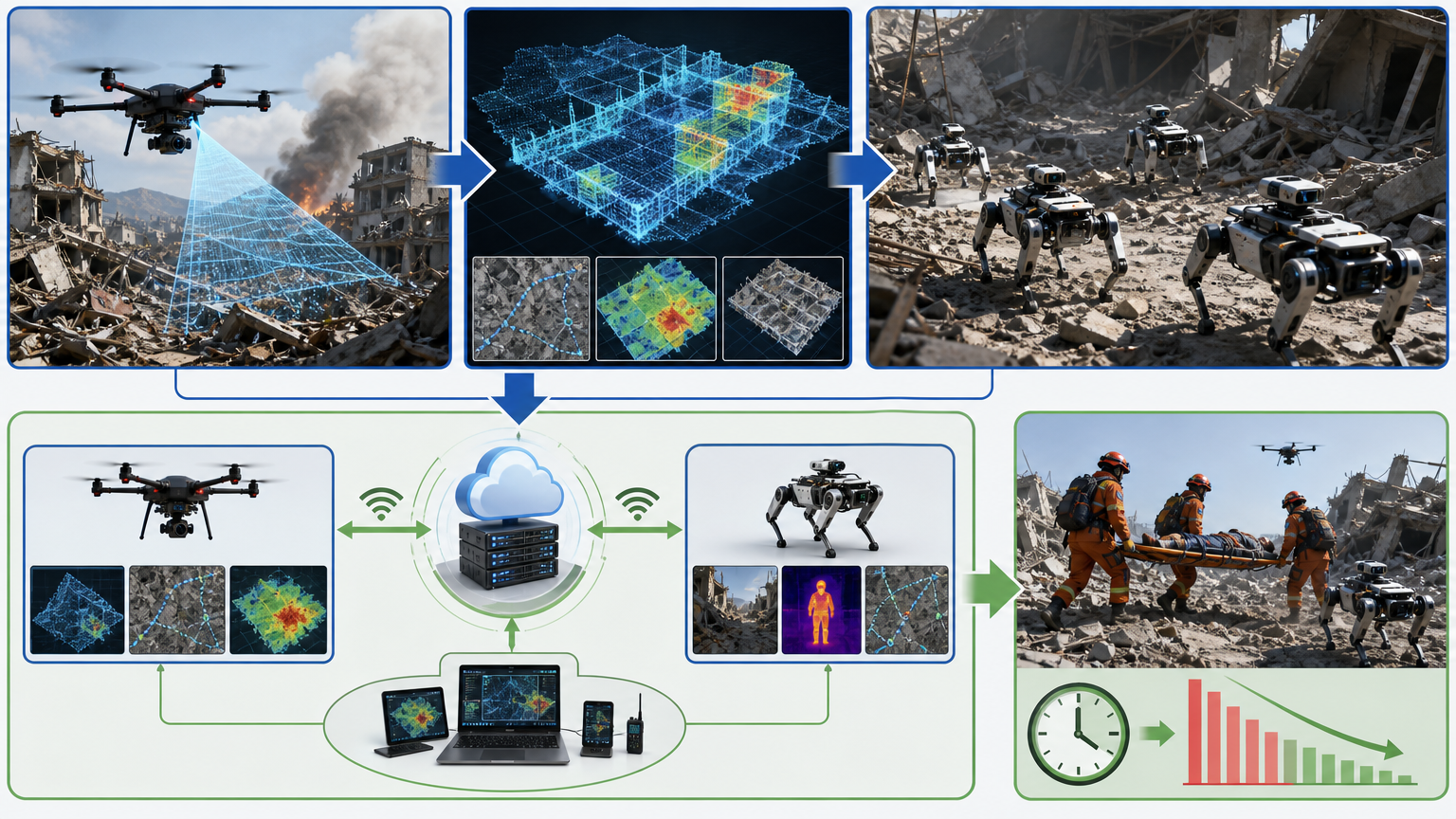
更长远的影响是,它让「多机器人协同」从概念落地成了可操作的方案:比如在灾难救援现场,空中无人机先测绘地形,地面四足机器人再进入废墟搜救,两者用同一套系统共享数据,不需要人工中转信息。这种协同效率的提升,能直接减少救援的黄金时间损耗。
但也要警惕标准化带来的风险:如果所有机器人都用同一套系统,一旦出现安全漏洞,可能会引发连锁反应——就像电脑病毒能感染所有Windows设备一样,机器人的统一系统也需要更严格的安全防护。
我们总说机器人要「像人一样聪明」,但这套架构给了我们另一种思路:或许机器人不需要模仿人类的思考,而是要拥有能适配不同身体的「通用大脑」。
当无人机和四足机器人能共用一套决策逻辑,当企业不用再为每台机器人定制系统,机器人的应用边界才真正被打开——它不再是某个场景里的专用工具,而是能在不同环境里灵活切换角色的「通用智能体」。
形态无界,智能统一。 未来的机器人战场,拼的不再是谁的硬件更精巧,而是谁的「大脑」能适配更多身体。