对抗知识焦虑,从看懂这条开始
App 下载
仿生机器人不靠编程,靠学人类动作变通用
通用智能体|人类动作学习|OmniPlanner系统|仿生机器人|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载通用智能体|人类动作学习|OmniPlanner系统|仿生机器人|具身智能|人工智能
想象一下:一台机器人刚在地下矿井里完成管道巡检,转头就潜入海底监测珊瑚,紧接着又爬上山地采集岩石样本——全程不需要工程师重新编写半行代码。这不是科幻片里的场景,而是挪威科技大学DRAGON实验室的OmniPlanner系统已经实现的能力。更让人惊讶的是,宾夕法尼亚大学的团队让机器人跳过了传统的‘指令编程’,直接学习人类的日常动作数据,就能在陌生环境里完成抓握、开关门这类精细任务。这些突破的背后,是仿生机器人正在从‘单一任务工具’向‘通用智能体’的跨越。但这一切,是怎么做到的?
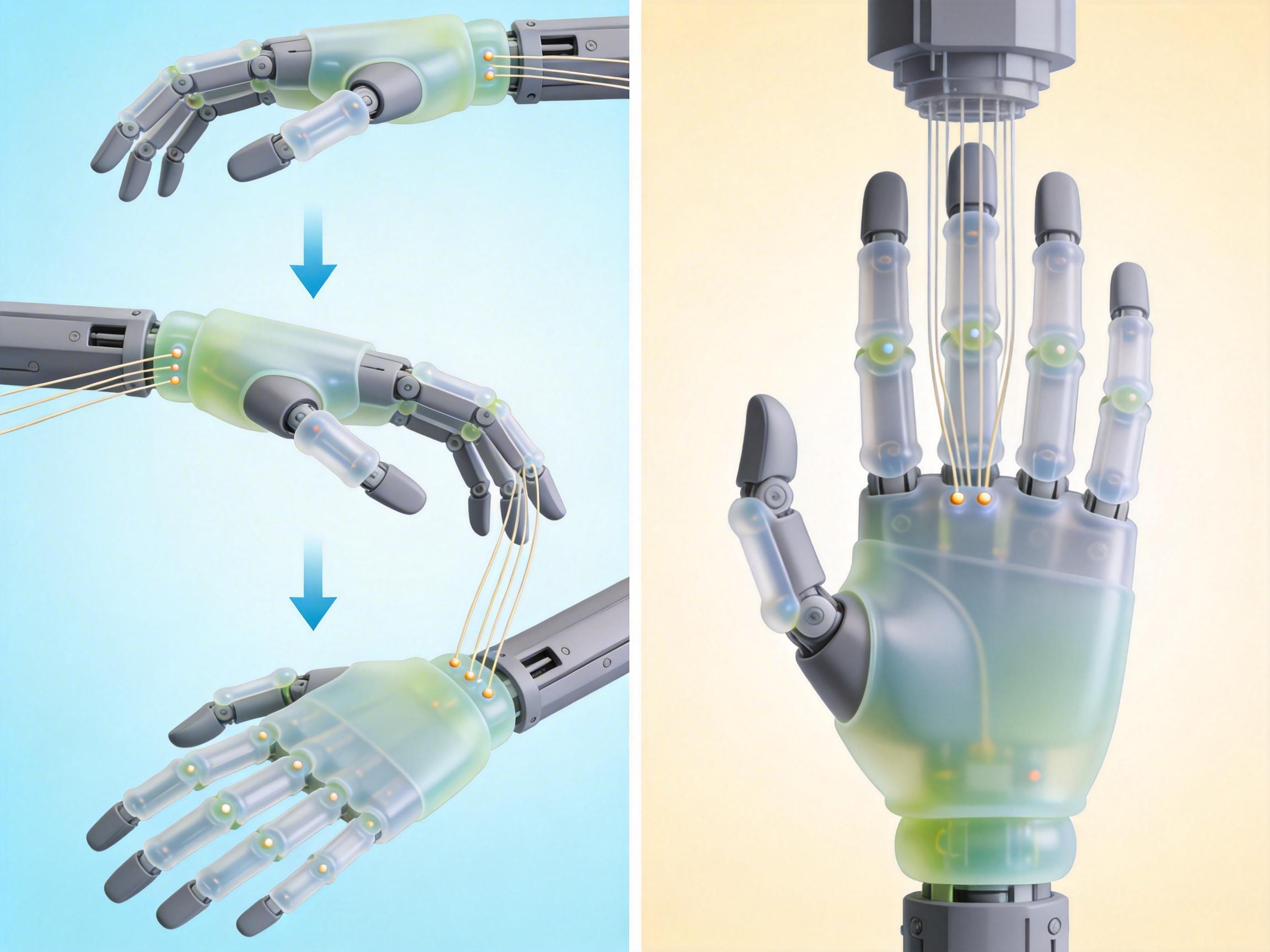
你可以把传统仿生机器人的制造想象成拼乐高——先做刚性骨架,再装软性关节,最后缠上肌腱和传感器,每一步都要精准对齐,稍有偏差就会影响动作。现在,科学家用一次3D打印就完成了这整套流程:从刚性的指骨、能缓冲的软性关节囊,到传递力量的肌腱,甚至连感知压力的触觉传感器,都能在同一台打印机里一体成型。
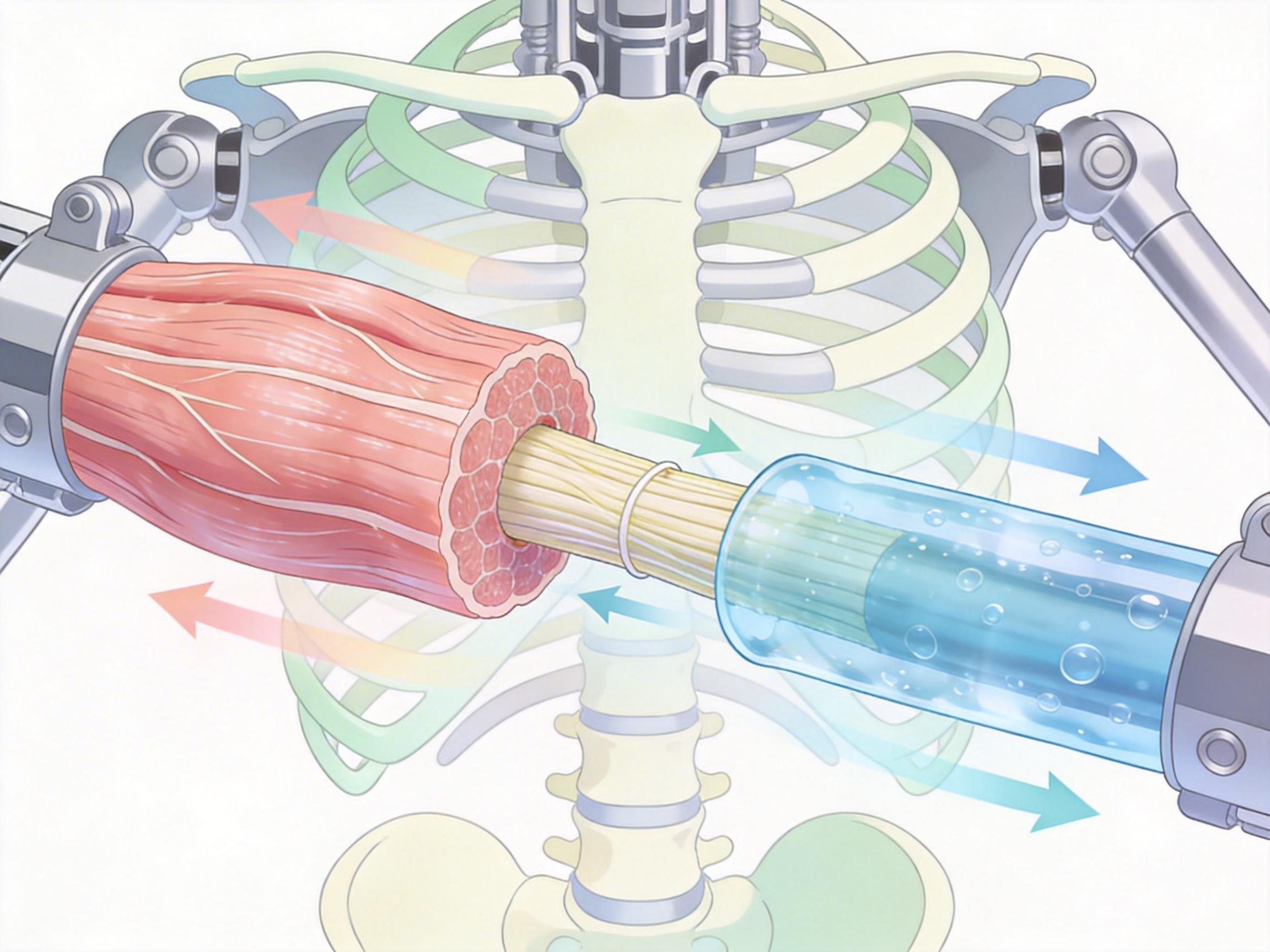
MIT团队还往前多走了一步:他们用高强度水凝胶做人工肌腱,把实验室培养的活肌肉和机器人骨架连在一起,造出了‘肌腱-肌肉单元’。你可以把这个单元想象成一个自带动力的弹簧——人工肌腱负责精准传递力量,活肌肉提供收缩的动力,两者配合让机器人抓握速度提升3倍,输出力直接翻了30倍,还能反复收缩7000次以上不失效。
这不是简单的零件集成,而是把生物的‘刚柔并济’直接搬进了机器人的身体里。过去机器人的关节要么太硬容易碰坏东西,要么太软抓不起重物,现在这种一体打印的结构,既能像人手一样捏起鸡蛋,也能握住扳手拧紧螺丝。
过去机器人的‘通用’是伪命题——能在工厂里焊汽车的机器人,到了家里连开门都做不到,因为它的程序是为单一场景写死的。宾夕法尼亚大学GRASP实验室的Junyao Shi团队,直接绕开了这个死胡同:他们让机器人学人类。
你可以把这个过程理解成‘老师带学生’:先通过动作捕捉设备记录人类完成抓握、推拉、开关门的全身动作,把这些高维数据‘蒸馏’成机器人能看懂的低维关键点——比如手腕的角度、手指的发力点。然后用基础模型把这些动作数据和环境信息结合,让机器人学会‘见招拆招’:看到光滑的玻璃杯就用轻握的力度,看到沉重的工具箱就调整手指的抓握姿势。
这种方法解决了机器人领域最头疼的‘数据稀缺’问题——过去训练一个机器人完成新任务,要在实验室里反复试错几万次,现在只要用上人类日常动作的公开数据,就能快速学会新技能。更关键的是,这种技能是可迁移的:学会了抓握杯子,机器人能举一反三抓起同样形状的苹果;学会了开家里的门,到了实验室也能打开类似的柜门。
我认为,这才是真正的通用能力——不是为每个场景定制程序,而是像人类一样,从经验里学习,在新环境里适应。
当单台机器人拥有了通用能力,科学家开始让它们组队——这就是ARISE项目正在做的事:模拟月球环境,让多台机器人自主协作完成资源勘探、样本采集。
你可以把这个团队想象成一支野外考察队:有的机器人负责飞上天扫描地形,有的在地面上采集岩石样本,有的负责把样本运回基地。它们不需要人类指挥,而是通过分布式算法自主分配任务——如果负责扫描的机器人没电了,负责运输的机器人会自动接过扫描的任务;如果发现了新的矿脉,采集机器人会优先赶往目标地点。

实验数据显示,这种协作模式让任务效率提升了30%,而且即使有1-2台机器人出现故障,整个团队也能继续完成任务。这不仅是技术的进步,更是对机器人角色的重新定义:它们不再是人类的工具,而是能独立解决复杂问题的‘合作者’。
从一体打印的仿生手,到学人类动作的通用机器人,再到组队干活的机器人团队,我们正在一步步把生物的智慧‘复制’到机器身上。但这一切的终点,从来不是造出和人类一模一样的机器人,而是让机器拥有像生物一样的‘适应力’——能在复杂的世界里,自己找到解决问题的办法。
仿的不是形,是生存的智慧。当机器人开始像人类一样学习、协作、适应,我们或许该重新思考:未来的人机关系,不是谁指挥谁,而是一起把那些人类做不到、做不好的事,一件件变成可能。