对抗知识焦虑,从看懂这条开始
App 下载
人形机器人跑不起来,卡在了「肌肉」上
关节负载|高频冲击|齿轮箱|机器人致动器|人形机器人|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载关节负载|高频冲击|齿轮箱|机器人致动器|人形机器人|具身智能|人工智能
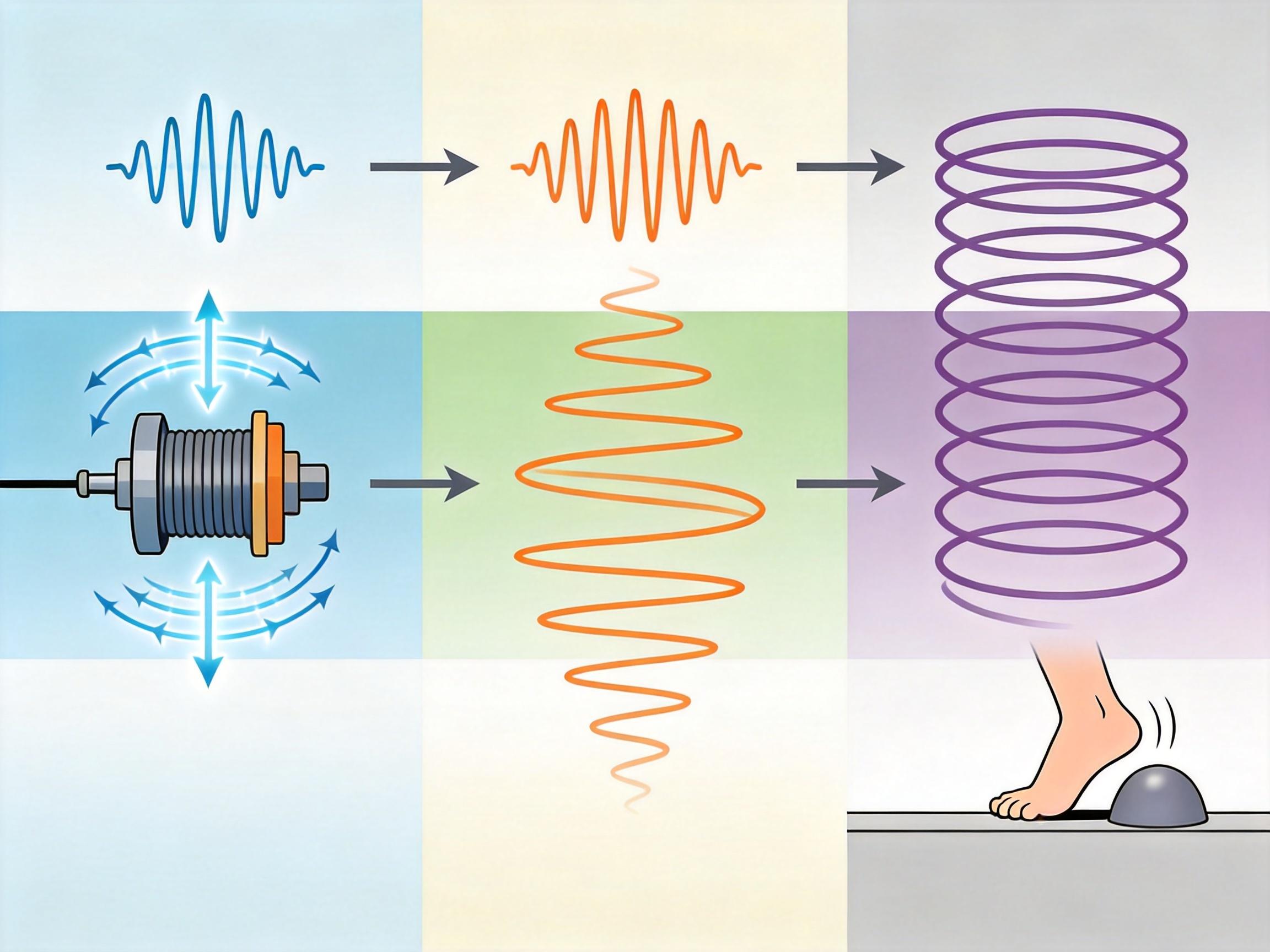
你或许见过人形机器人在实验室里流畅行走的视频,但很少有人告诉你:它们大多撑不过一个完整的8小时工作日。每迈出一步,腿部关节就要承受2到3倍体重的冲击,一小时就是5000次,一个月累积超百万次循环——这种高频冲击下,传统工业致动器会像脆玻璃一样碎裂。为什么我们造不出能像人一样「连轴转」的机器人?答案藏在那些被称为机器人「肌肉」的致动器里。
你可以把齿轮箱想象成一个「惯性放大器」——当电机通过齿轮驱动关节时,负载的惯性会被齿轮比的平方倍放大。比如用100:1的高齿轮比追求大扭矩,关节感受到的惯性会瞬间增加10000倍,机器人腿会像灌了铅的钢管,遇到台阶或小石子根本来不及「让步」,冲击力直接砸断齿轮齿。
这就是反射惯性的陷阱:高齿轮比能带来大扭矩,却也把关节变成了无法灵活响应的刚性结构。工业机器人靠固定轨迹和封闭空间避开了这个问题,但人形机器人要在真实世界行走,必须在扭矩和灵活性间找平衡——现在行业的共识是,把齿轮比控制在6:1到50:1之间,用稍大的电机换更低的反射惯性,让关节能像人的肌肉一样「卸力」。
MIT猎豹机器人的致动器就是典型:低齿轮比设计让它能以每小时30公里的速度奔跑,被踢一脚也能立刻调整姿态,而用传统高齿轮比致动器的机器人,可能被轻轻一碰就散架。
传统工业机器人用的是「刚性位置控制」——命令关节转到某个角度,它就死死卡在那里,像被焊住的机械臂。但人形机器人需要的是「柔顺阻抗控制」:能像人一样,根据接触力调整关节的软硬度。
这背后是多层高速闭环控制的协同:电流环每秒响应20000次,保证电机驱动力精准;扭矩环每秒调整500次,适应动态负载;最外层的阻抗环,能在毫秒级内切换关节的刚度——比如脚刚落地时调硬支撑身体,遇到坑洼时立刻调软吸收冲击。
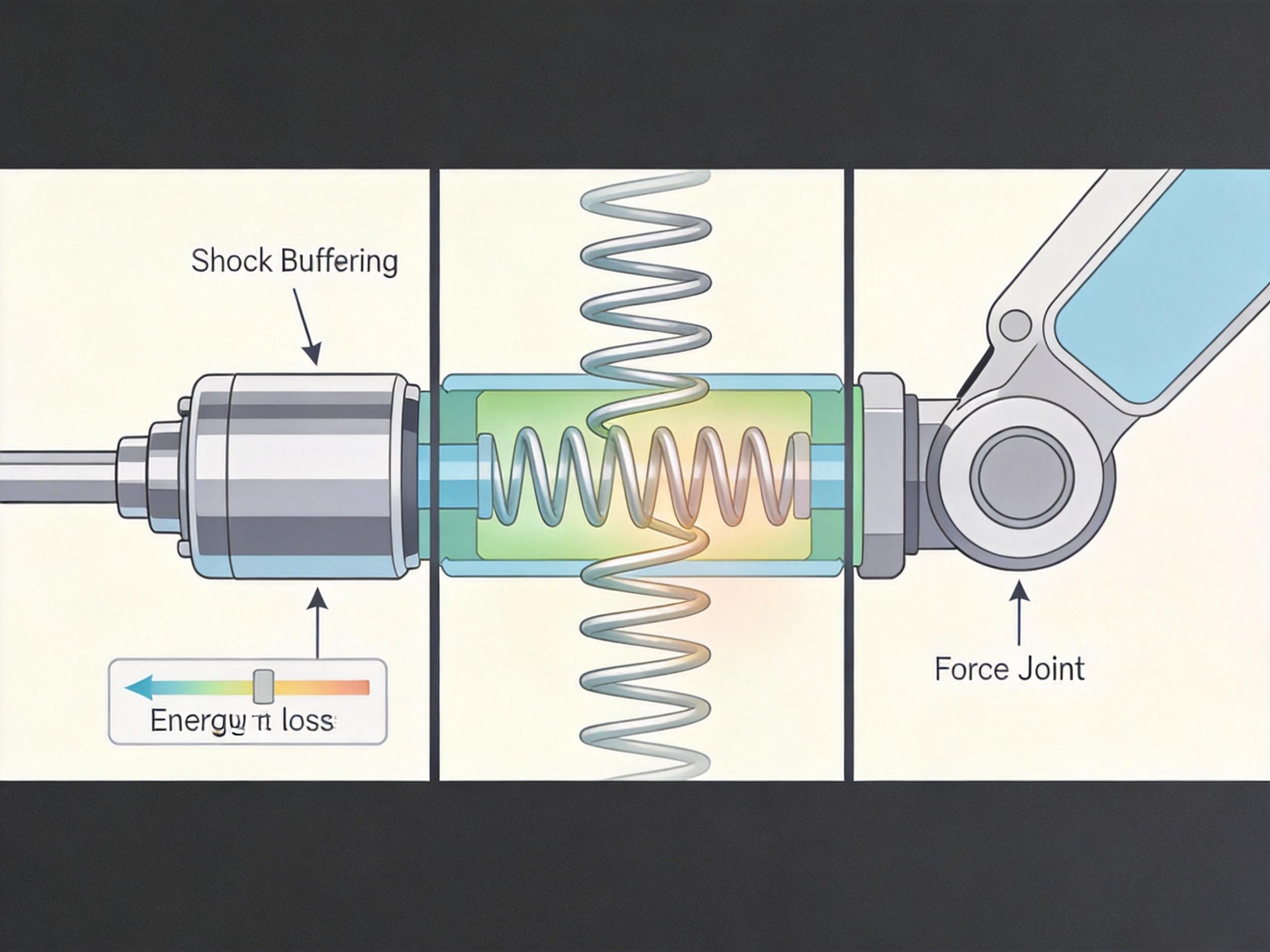
Agility Digit机器人用的系列弹性致动器(SEA),干脆在电机和关节之间加了一根物理弹簧。这根弹簧不仅能缓冲冲击,还能通过形变直接测量受力,相当于给机器人装了「触觉神经」。但SEA也有代价:弹簧的振荡会增加控制复杂度,而且能量效率比纯电机驱动低10%左右。
更关键的是,这种柔顺控制离不开多模态传感器的融合——力传感器、视觉相机、惯性测量单元(IMU)的数据要在瞬间整合,任何一个传感器延迟10毫秒,机器人都可能失去平衡摔倒。
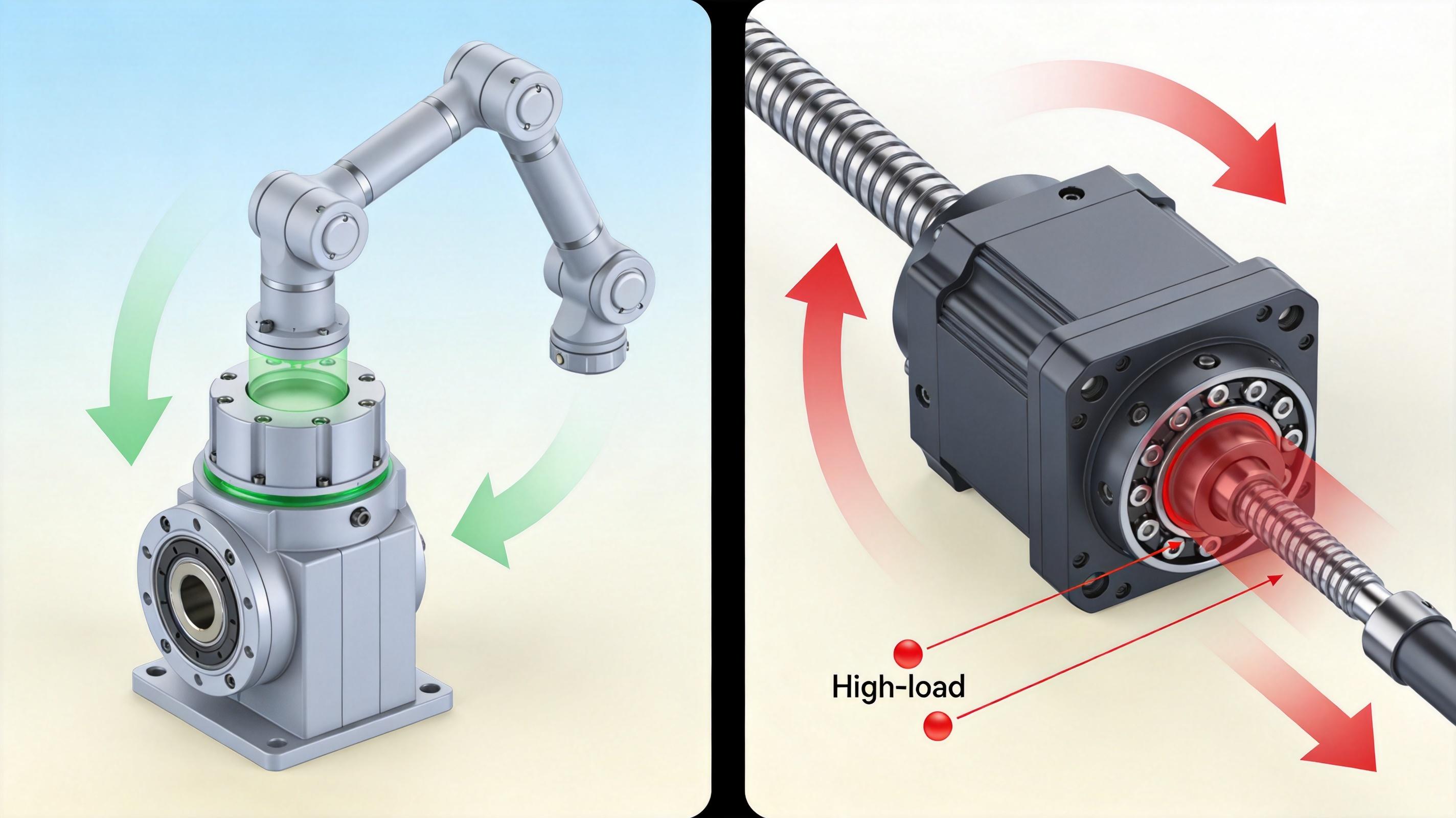
传统工业致动器的设计逻辑从根上就不适合人形机器人:它追求的是刚性、精度和静态负载能力,而不是高频冲击下的耐久性和柔顺性。比如工业用的滚珠丝杆,靠钢珠的点接触传递力,在人形机器人腿部的高频冲击下,钢珠会在轨道上砸出凹坑,也就是「布林效应」,不出一个月就会失效。
现在行业的主流方案是,上肢用谐波减速器的旋转致动器,兼顾精度和重量;下肢用行星滚柱丝杆的线性致动器——滚柱和丝杆是线接触,接触面积是滚珠丝杆的10到15倍,能把冲击载荷分散开,寿命是滚珠丝杆的10倍以上。
但这还不够。Tesla的Optimus机器人已经开始用液冷致动器,把连续扭矩输出提升了2.5倍;还有团队在研发可变刚度致动器,能像人的肌肉一样,通过电信号实时调整硬度。这些技术没有现成的工业产品可用,只能靠厂商自己研发——谁能造出更轻、更韧、更聪明的「肌肉」,谁就掌握了人形机器人的未来。
当然,自研也意味着成本的飙升:一套高性能线性致动器的价格能占到机器人整机成本的70%,这也是人形机器人至今难以规模化的核心原因之一。
当我们谈论人形机器人的未来时,总习惯把目光投向AI算法,却常常忽略了那些藏在关节里的「肌肉」。就像人类的运动能力不只是大脑的指令,更是骨骼、肌肉和神经的协同结果,人形机器人的突破,最终要靠机械、电子和控制技术的底层融合。
「致动器不是机器人的零件,而是机器人的「身体」本身。」这句话或许能概括这个领域的核心逻辑:只有当机器人的「肌肉」能像人一样感知、适应、甚至自我修复时,它才能真正走出实验室,成为我们生活中的一部分。而现在,我们才刚刚开始学会怎么给机器人「炼肌肉」。