对抗知识焦虑,从看懂这条开始
App 下载
蝙蝠高速飞行之谜:靠“声流”而非单个回声?
自主导航系统|回声定位|声流机制|高速飞行|蝙蝠|动物行为学|生命科学
对抗知识焦虑,从看懂这条开始
App 下载自主导航系统|回声定位|声流机制|高速飞行|蝙蝠|动物行为学|生命科学
当夜幕降临,世界沉入寂静,一群真正的飞行大师才刚刚苏醒。蝙蝠,这些夜的精灵,在漆黑的林间、狭窄的洞穴中以惊人的速度穿梭,精准捕捉飞舞的蚊虫,却从不与障碍物相撞。长久以来,我们将其归功于它们精妙的“回声定位”系统——如同随身携带的生物声呐,通过发射超声波并分析回声来构建三维世界地图。
然而,这个解释一直存在一个令人困惑的缺口。在高速飞行和杂乱环境中,无数回声如暴雨般涌来,蝙蝠的大脑如何在瞬息之间处理这庞大的数据洪流,并做出精确的飞行决策?如果每一个回声都需要被单独解析,其计算负担将是难以想象的。这不仅是生物学家的疑问,更是机器人工程师们在研发自主导航系统时面临的瓶颈。难道,蝙蝠隐藏着一个我们尚未知晓的、更高效的感知秘诀?
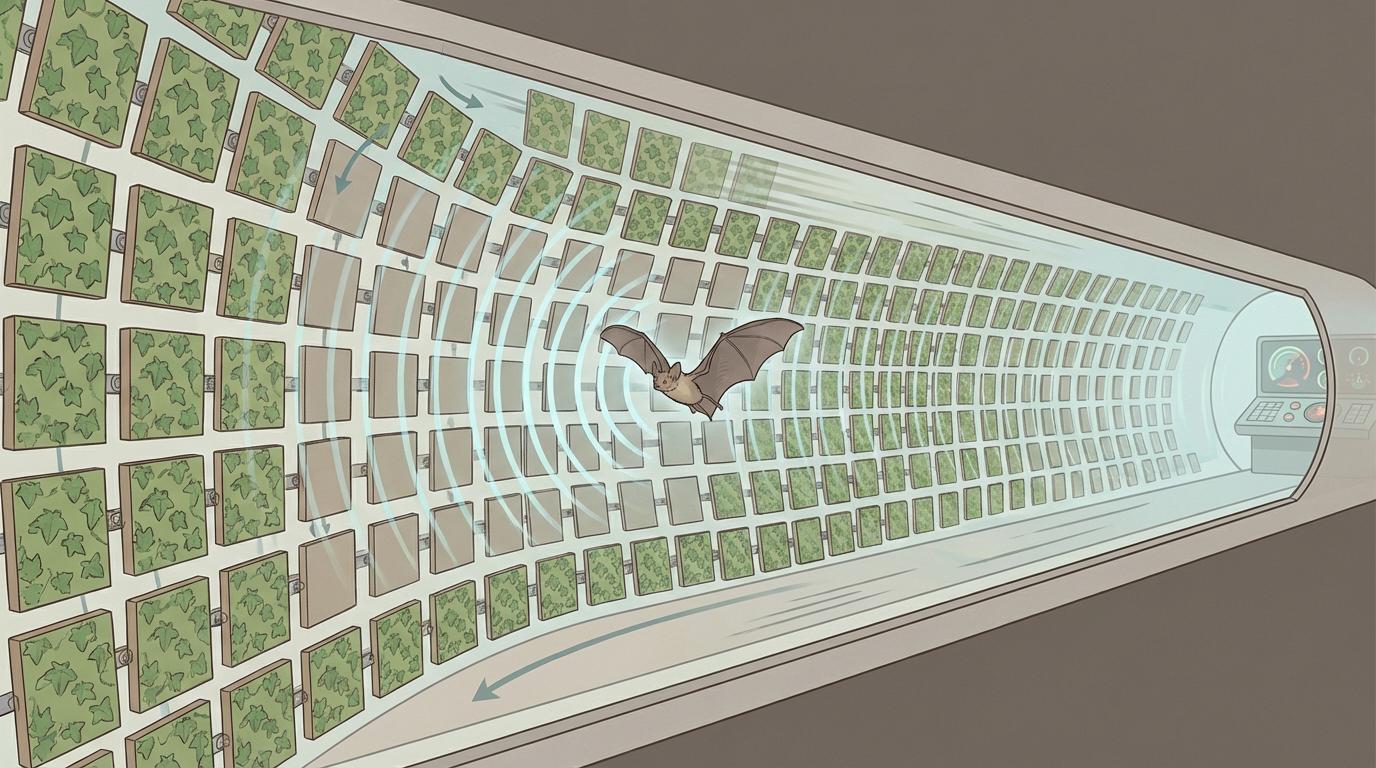
为了解开这个谜团,英国布里斯托大学的感官生物学家马克·霍尔德里德(Marc Holderied)与航空工程师谢恩·温莎(Shane Windsor)领导的团队,进行了一项极具创意的实验。他们没有将蝙蝠带入实验室,而是在一片蝙蝠通勤的必经之路上,建造了一个长达八米的“蝙蝠加速器”。

这个装置并非真的为蝙蝠“加速”,而是一个精巧的环境模拟器。通道两侧排列着8000块覆盖着人造常春藤叶的旋转面板,用以模拟树篱的声学纹理。通过控制这些面板的旋转方向和速度,研究人员可以人为地操纵蝙蝠感知到的环境“运动”。
实验结果发表于《英国皇家学会学报B》,其发现令人震惊:
这一结果有力地证明,蝙蝠并非在逐一处理离散的回声点,而是在感知一种整体的、连续变化的声学模式——研究人员将其命名为**“声学流”(Acoustic Flow)**。正如霍尔德里德教授所比喻的:“这就像我们骑自行车,速度越快,周围的景物从我们眼前掠过得就越快。蝙蝠通过感知回声返回速率的整体变化,形成了一种‘声流’,从而判断自身的速度和与环境的相对关系。”
“声学流”的概念,其实在视觉领域有一个孪生兄弟——“光流”(Optic Flow)。光流是视觉系统感知运动的基本方式。当我们移动时,视网膜上的图像会形成一个矢量场,远处物体移动慢,近处物体移动快,大脑通过解析这个场的模式来估算速度和方向。这是绝大多数自动驾驶汽车视觉系统和无人机导航的核心算法之一。
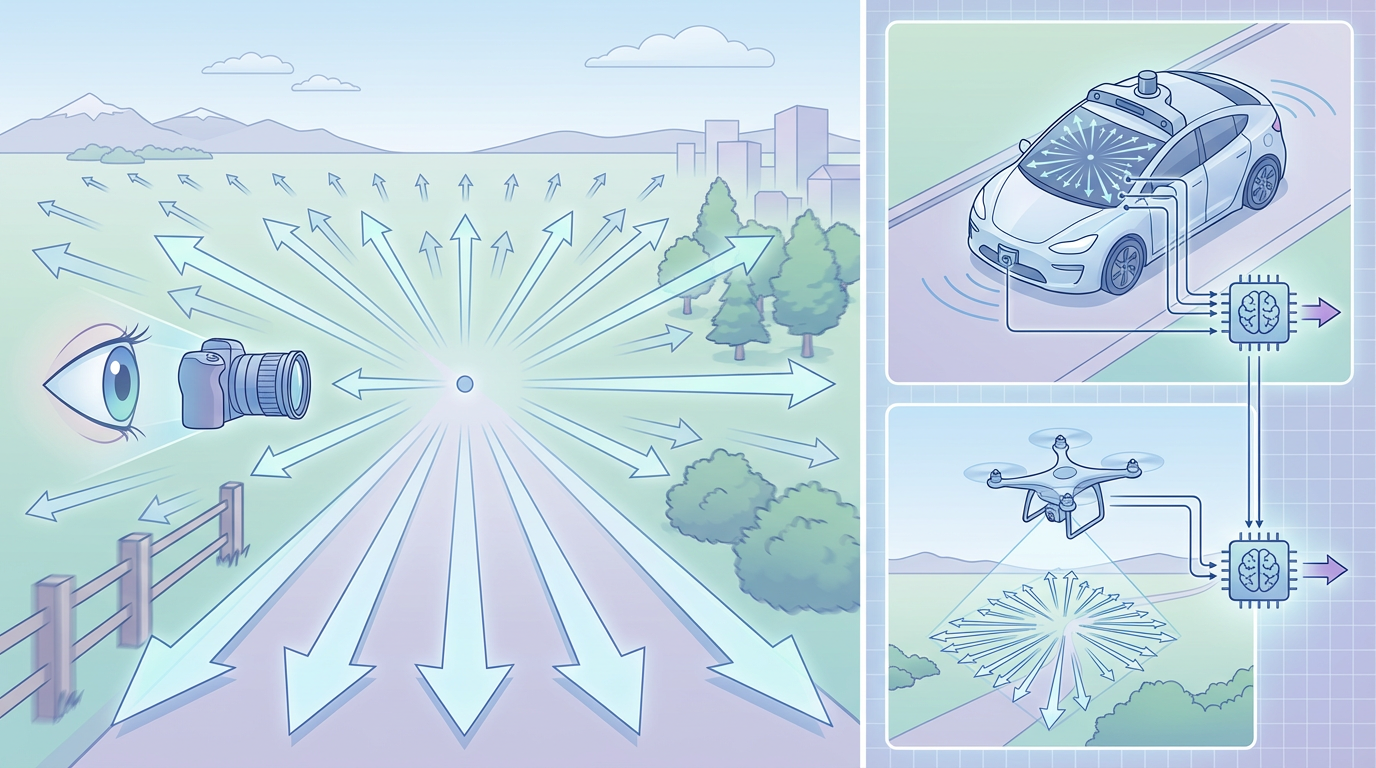
蝙蝠的“声学流”则是听觉版的“光流”。它整合了无数回声的时间、频率和强度变化,特别是利用多普勒效应——即因相对运动引起的声音频率变化——来感知速度。蝙蝠的大脑并非在解一道道复杂的几何题,而是在欣赏一曲由回声构成的、节奏不断变化的“交响乐”,并根据乐曲的节奏快慢来调整自己的飞行舞步。
这种策略的精妙之处在于效率。它绕过了对海量离散数据点的繁琐计算,直接提取出关于“运动”这一核心信息。这不仅大大降低了大脑的计算负荷,也使得蝙蝠能在极短时间内做出反应,这对于在复杂环境中高速飞行的生存者而言至关重要。
蝙蝠的这一发现,为陷入困境的机器人导航技术点亮了一盏明灯。目前,主流的机器人导航技术,无论是基于激光雷达的SLAM(即时定位与地图构建)还是视觉SLAM,都面临着共同的挑战:
相比之下,基于声呐的机器人虽然功耗较低,但在杂乱环境中性能不佳,因为它们同样试图解析每一个回声。而蝙蝠的“声流”策略提供了一种全新的思路:从“数据处理”转向“模式感知”。
这意味着未来的机器人,尤其是无人机和水下航行器,可以借鉴这种机制:
从蝙蝠的“声流”导航,到同济大学为应对嘈杂环境开发的音频视觉导航框架BeDAViN,再到澳大利亚昆士兰科技大学受大脑启发的LENS类脑导航系统,我们正处在一个仿生智能的黄金时代。科学家和工程师们不再仅仅满足于模仿生物的外形,而是开始深入探索其内在的、高效的计算原理。
然而,从蝙蝠到真正智能的机器人,道路依然漫长。我们仍需解决诸多挑战:如何在真实世界的强噪声中有效提取“声流”信号?如何让机器拥有蝙蝠那样自适应调整声波发射策略的能力?如何构建一个能够整合多模态“流”信息的通用决策大脑?
蝙蝠的秘密揭示了一个深刻的道理:进化,这位最伟大的工程师,早已通过亿万年的试错,找到了最优解。它并非依赖于无穷的算力,而是依赖于对信息处理方式的极致优化。我们向蝙蝠学习的,不仅是一种导航技术,更是一种关于智能本质的哲学——真正的智能,或许不在于能计算得多快,而在于懂得如何倾听和理解这个世界流动的节奏。