对抗知识焦虑,从看懂这条开始
App 下载
给机器人加些晃动感,反而能解决拥堵
随机偏移|效率悖论|机器人路径规划|哈佛大学|亚马逊仓储|AI智能体|人工智能
对抗知识焦虑,从看懂这条开始
App 下载随机偏移|效率悖论|机器人路径规划|哈佛大学|亚马逊仓储|AI智能体|人工智能
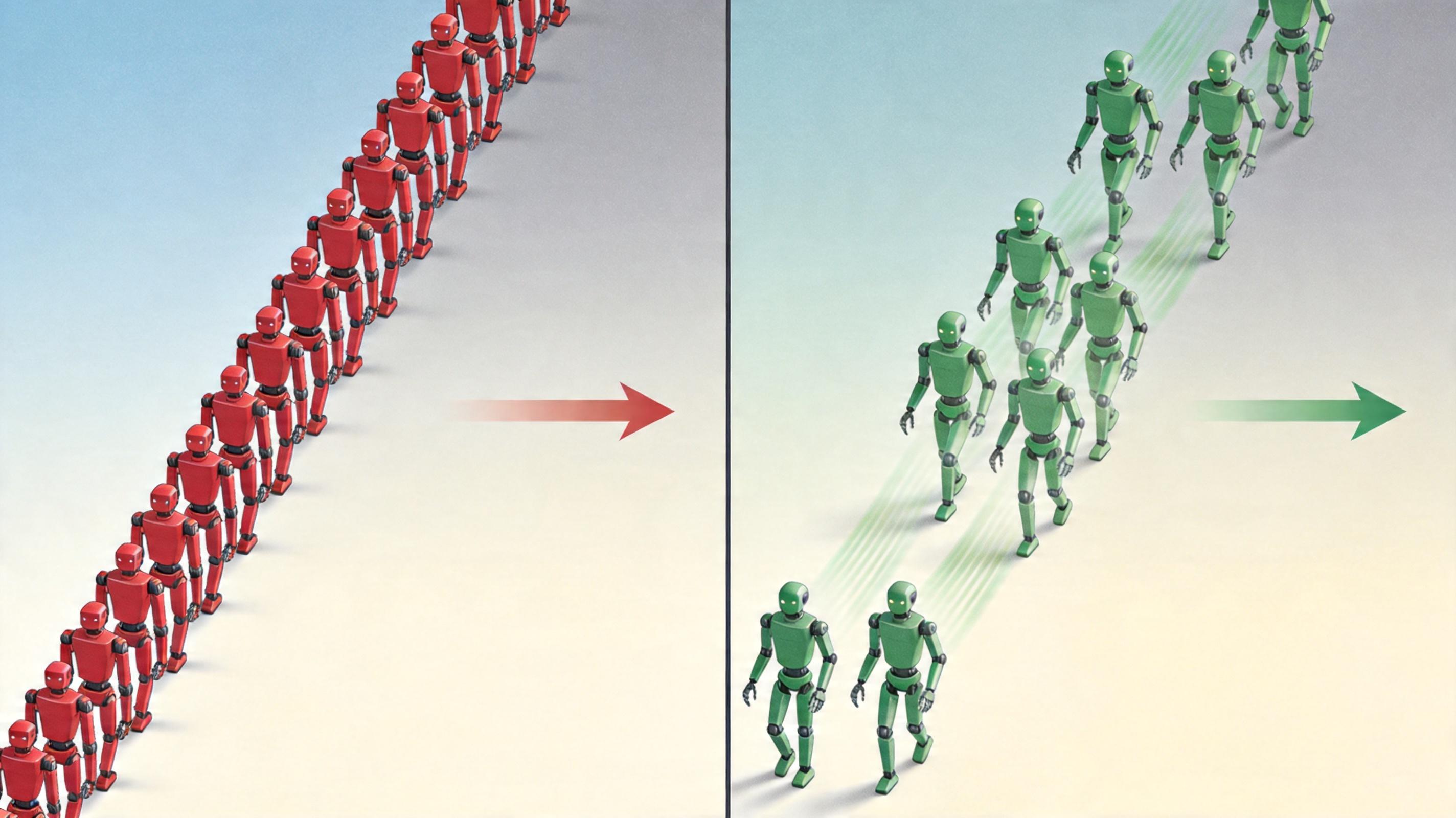
想象一个挤满机器人的仓库:几百个小轮子在地面嗡嗡作响,驮着货架奔向拣货点。一开始,机器人越多,货架流转越快——直到某个临界点,整群机器突然卡成一团,像早高峰被焊死的路口,多一个机器人都成了累赘。这不是科幻场景,是亚马逊仓储里真实发生过的效率悖论,而哈佛大学的研究者用一个反常识的办法破了局:给机器人的路径加一点可控的「晃动感」。
他们让机器人在直奔目标的路线上,加入微小的随机偏移——不是东倒西歪的乱撞,是像人走路时自然的左右摆幅。实验结果完全颠覆了「越精准越高效」的认知:当机器人不再死守直线,那些原本会堵上十几分钟的死锁点,变成了短暂的「擦肩群聚」,机器人们蹭着彼此的侧身就能继续移动,整体任务效率最高能提升30%。主导研究的团队结合数学建模、仿真和荷兰埃因霍温理工大学的实体机器人实验,把这个「晃动感」量化成了一个「黄金噪声区间」——太少,机器人还是会扎堆;太多,就会像没头苍蝇一样乱逛,效率反而暴跌。
这个发现的妙处,不在于让机器人变「聪明」,而在于承认群体的「不完美」。过去设计机器人群体,总想着用最精准的路径规划、最严格的中央调度来避免冲突,却忽略了一个本质:当几百个个体在有限空间里互动,每一个「完美」的直线指令,都会变成制造拥堵的导火索——就像所有人都盯着最短路径走,只会把路口堵死。而适度的随机性,相当于给每个机器人的路径「松了绑」,让它们能在局部冲突里自行调整,不需要等中央系统的指令。
更值得关注的是,这不是机器人独有的规律。研究团队发现,这个「黄金噪声区间」的逻辑,和蚁群觅食、鸟群避障的机制如出一辙——自然界里的群体从来不会依赖中央指挥,都是靠简单的局部规则加一点点随机调整,实现全局的高效。甚至城市交通里的「拉链式通行」,本质也是给车流加入了可控的「顺序随机」,避免大家挤成一团。
当然,这个方法也有边界。它只适用于中等密度的群体——如果机器人多到连晃都晃不开,再精密的随机调整也没用;而且这种随机性必须是「可控」的,不能是完全无规则的混乱。但它给了我们一个全新的思路:设计群体系统时,与其追求每个个体的绝对精准,不如给系统留一点「弹性空间」。
从机器人仓库到城市路口,从蚁群到人流,那些看似混乱的微小偏移,恰恰是复杂系统保持高效的秘密。毕竟,完美的秩序容易崩塌,而带一点「晃动感」的有序,才最有韧性。