对抗知识焦虑,从看懂这条开始
App 下载
机器人不靠单一感官,在月球南极也能站稳
机器人自主导航|多模态感知与控制|NASA太空任务|月球南极|航天探索|多模态视觉|天文宇宙|人工智能
对抗知识焦虑,从看懂这条开始
App 下载机器人自主导航|多模态感知与控制|NASA太空任务|月球南极|航天探索|多模态视觉|天文宇宙|人工智能
想象一下:15公斤的机器人在碎石坡上突然收起轮式结构,用膝盖向后弯曲的怪异姿势跨过大坑;4架无人机在月球南极永久阴影区的黑暗中,仅凭自身传感器避开峭壁精准着陆;甚至在某台摄像头突然失效时,机器人还能靠触觉和惯性数据继续完成任务。这不是科幻片里的特效——2026年的今天,这些场景已经从实验室走到了NASA的太空任务清单上。让机器人突破单一感官局限的,正是多模态感知与控制技术——简单说,就是让机器人像人类一样,用眼睛看、用耳朵听、用身体感知环境,再统一指挥行动。但它到底是怎么让机器人在极端环境里化险为夷的?
你可以把传统机器人想象成一个只有眼睛的登山者——在晴天的平整路面能走得飞快,一旦遇到暴雨、浓雾或者看不见的暗坑,立刻就会失控。而多模态机器人更像经验丰富的探险家:它的“眼睛”是摄像头和激光雷达,能精准测绘地形;“皮肤”是力觉和触觉传感器,能感知地面的摩擦力和障碍物的硬度;“平衡感”是惯性测量单元,能实时调整姿态;甚至还有“耳朵”捕捉环境中的异常声响。
这些传感器的数据不是各自为政的。比如东京大学的MEVIUS2四足机器人,它的激光雷达会先扫出3D地形轮廓,摄像头再补充纹理信息区分“石头”和“土壤”,最后由统一的控制系统计算出每一步该用多大的力、抬多高的腿。整个过程就像你过马路时,眼睛看红绿灯、耳朵听汽车鸣笛、脚感受地面湿滑,大脑瞬间做出判断——只不过机器人的“大脑”是经过强化学习训练的算法。
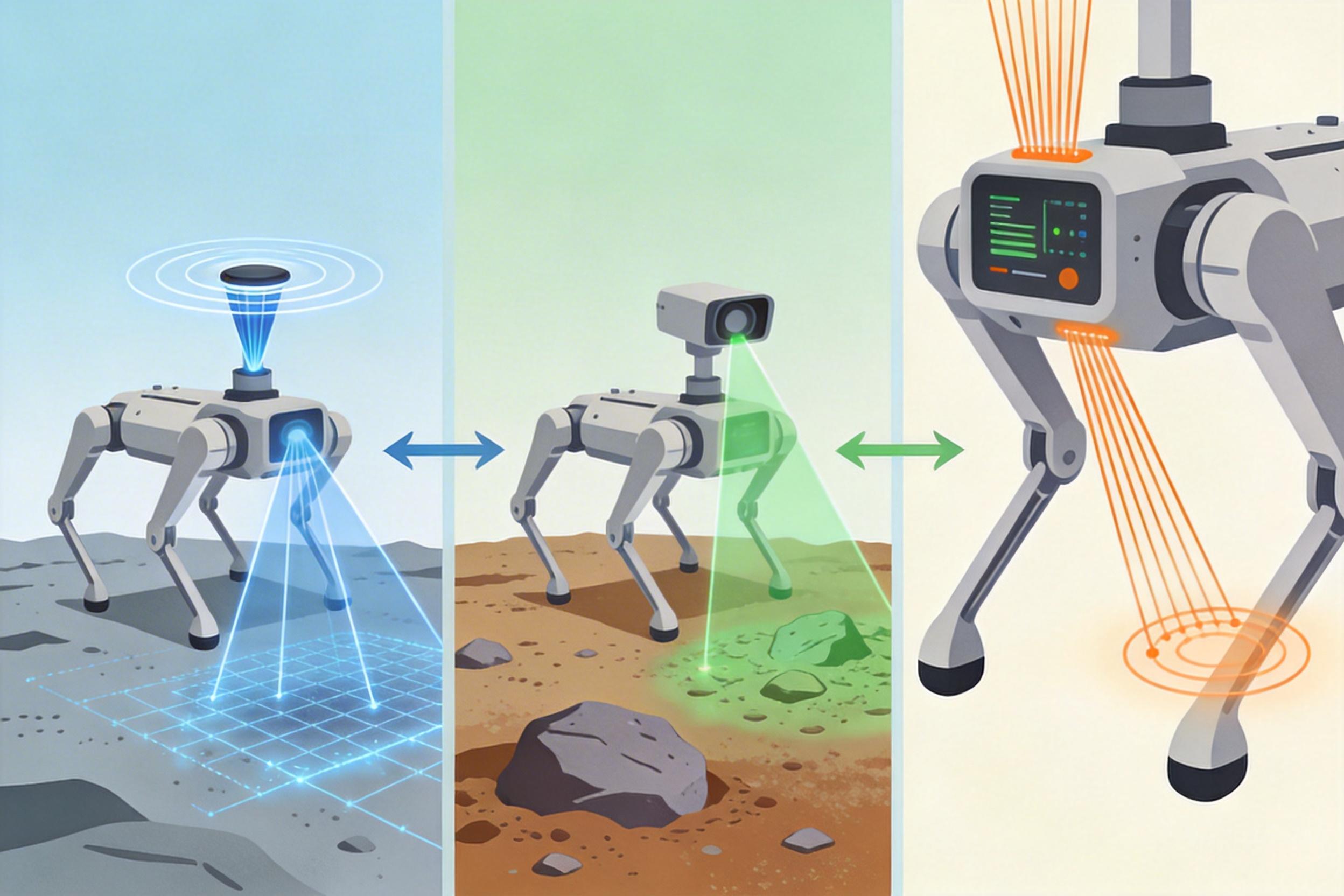
更关键的是,多模态系统自带“容错buff”。就像人类瞎了一只眼还能靠耳朵和触觉走路,DreamWaQ++控制器能在某一传感器失效时,自动调用其他感官的数据补位。测试中,研究人员故意遮住机器人的摄像头,它依然能靠关节的力觉传感器感知地面起伏,稳稳爬完一段楼梯——这在单模态机器人身上是完全不可能的事。
如果说多模态感知是机器人的“感官系统”,那新型人工肌肉就是它的“灵活四肢”。MIT团队研发的电流体纤维人工肌肉,彻底打破了传统刚性伺服电机的局限——你可以把它想象成一根装满特殊液体的细管子,通电后液体流动就能让管子收缩或伸展,像人类的肌肉一样柔软。
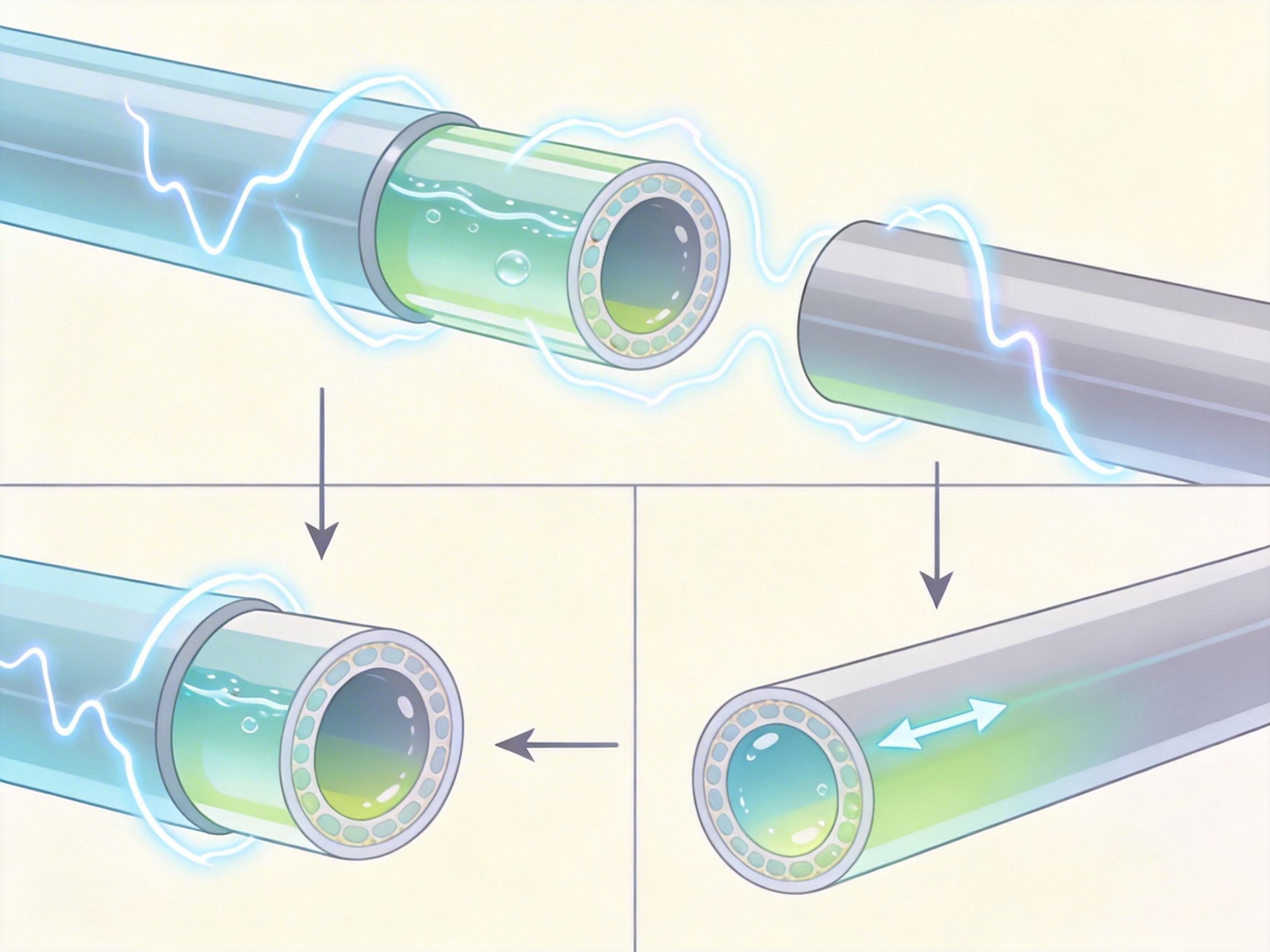
这种肌肉的厉害之处在于,它能做到刚性电机根本做不到的动作:比如在狭窄空间里弯曲成任意角度,或者轻轻抓起一个鸡蛋而不捏碎。更重要的是,它的控制逻辑和多模态感知系统天然适配——传感器感知到物体的软硬度后,能立刻调整电流大小,让肌肉输出刚好合适的力量。
当然,这一切的背后离不开强化学习算法的支撑。以Roadrunner双足轮式机器人为例,研究人员没有给它编写上千条应对不同地形的程序,而是让它在仿真环境里“试错”了几百万次:遇到陡坡就切换成轮式模式,遇到障碍物就把膝盖转向后方跨过去,摔得越多,算法就越聪明。最后只需要一个控制程序,就能让它无缝切换行走、滑行、攀爬等多种模式——连单轮平衡这种高难度动作,都能“零样本”直接在实体机器人上实现,不用重新训练。
不过,这项技术也不是完美的。电流体肌肉的力量目前还赶不上刚性电机,只能用于轻量级机器人;多模态融合的计算量巨大,对机器人的处理器性能要求很高;而且不同传感器的数据同步问题至今还没有完全解决——就像人类的眼睛和耳朵偶尔会出现“视听不一致”的错觉,机器人也可能因为传感器延迟做出错误判断。
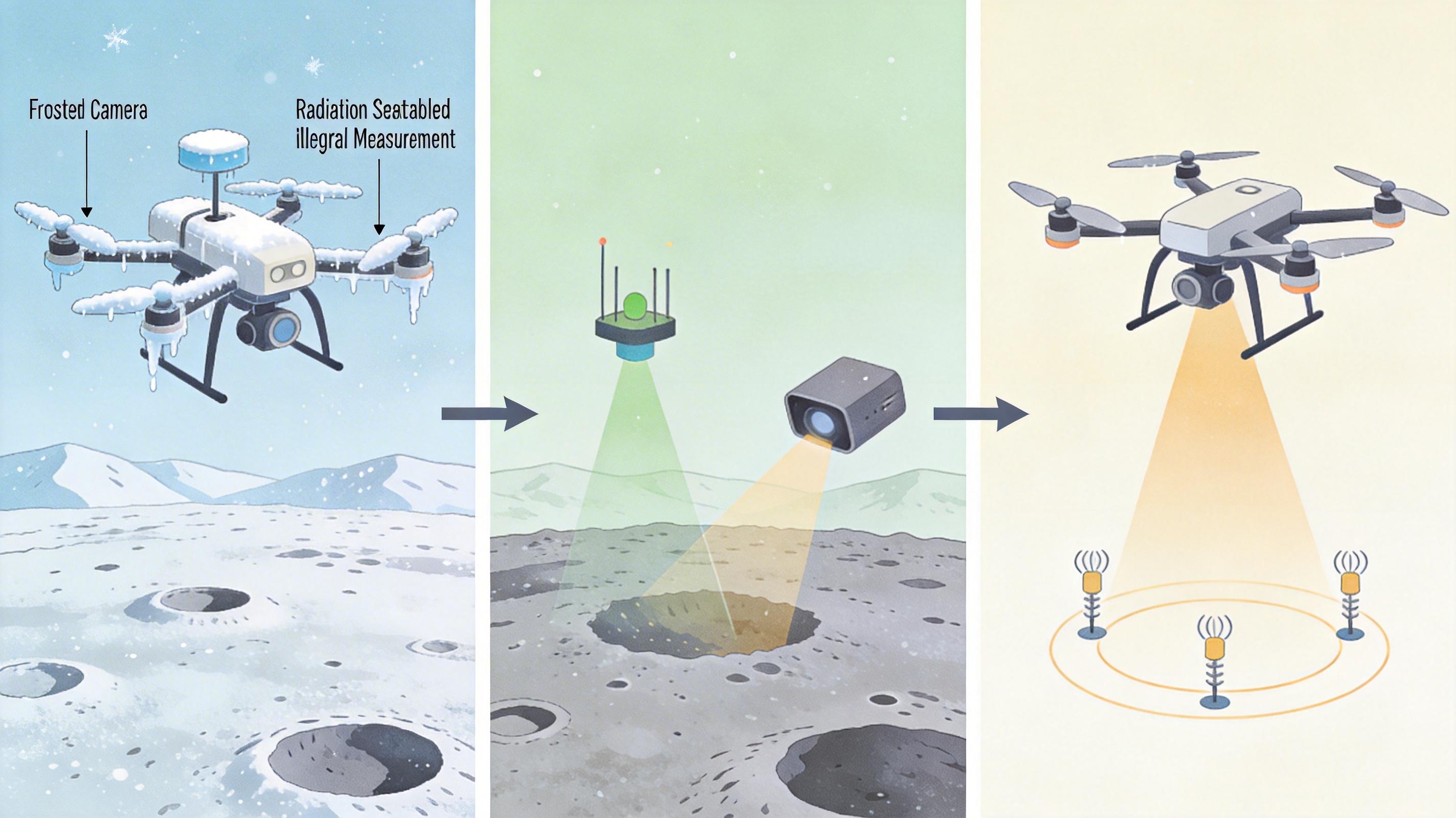
NASA的SkyFall和MoonFall任务,算是给多模态机器人安排了最严苛的“高考”。火星的沙尘暴会遮住摄像头,月球南极的温度能降到零下200摄氏度,连信号延迟都能达到几分钟——这意味着机器人必须完全自主决策,不能靠地球的指令救场。
以MoonFall的月球无人机为例,它的多模态感知系统经过了专门的极端环境优化:激光雷达用了抗低温的材料,摄像头加了加热装置,惯性测量单元能在强辐射环境下保持精度。着陆时,它会先用激光雷达扫出一片安全区域,再用摄像头确认没有隐藏的小坑,最后靠触觉传感器感知着陆时的冲击力,调整姿态避免翻倒。整个过程没有人类干预,完全由机器人自己完成。
这些太空任务的意义,不止是探索宇宙——它们逼出来的技术,很快就能用到地球上。比如抗低温的传感器可以用于极地科考机器人,自主避障的算法可以用于灾难救援机器人,甚至连电流体肌肉,未来都可能做成辅助行走的外骨骼,帮助行动不便的人重新站起来。
当我们谈论机器人的“智能”时,我们其实在谈论它的“适应力”——能不能在没见过的环境里活下去,能不能在出故障时自己解决问题。多模态感知与控制,就是给机器人装上了“生存本能”。
未来的机器人不会是实验室里的“精致展品”,而是能在矿山、深海、太空这些人类难以涉足的地方干活的“实干家”。它们不会只有一种本事,而是像变形虫一样,根据环境随时调整自己的形态和行为。
感官越丰富,适应力越强。这是生物进化的规律,也是机器人智能进化的方向。