对抗知识焦虑,从看懂这条开始
App 下载
智能轮椅不靠替代人,要和人一起找路
Christian Mandel|德国人工智能研究中心|辅助驾驶|多传感器融合系统|智能轮椅|AI智能体|人工智能
对抗知识焦虑,从看懂这条开始
App 下载Christian Mandel|德国人工智能研究中心|辅助驾驶|多传感器融合系统|智能轮椅|AI智能体|人工智能
在德国不来梅的实验室走廊里,一位重度残障用户操控着头控轮椅,在仅0.85米宽的通道里灵活转身,避开突然出现的推车——整套动作比实验室的AI导航系统快了2秒。这是德国人工智能研究中心(DFKI)研究员Christian Mandel十年前记下的场景,也是他后来所有智能轮椅研究的起点:那些被认为“需要被技术替代”的人,其实在复杂环境里比机器更懂怎么“活”。那AI到底该在轮椅里扮演什么角色?
你可以把智能轮椅的多传感器融合系统想象成一个“超级副驾”——它不像自动驾驶汽车那样直接抢过方向盘,而是帮你盯着后视镜、盲区和突然窜出来的行人,在你快要撞上去时轻轻修正方向。
这个“副驾”的核心是多传感器融合:轮椅上的双激光雷达像两个不停转动的“眼睛”,每秒扫描12次周围12米内的所有物体;3D摄像头负责识别“这是咖啡桌还是轮椅”;惯性测量单元(IMU)像个“平衡仪”,时刻记录轮椅的倾斜和震动;还有里程计精准测算每一轮转动的距离。这些数据会被输入ROS2导航系统,通过SLAM算法同步绘制环境地图并定位自己的位置——就像你一边走路一边画地图,还能随时说出自己在哪个路口。
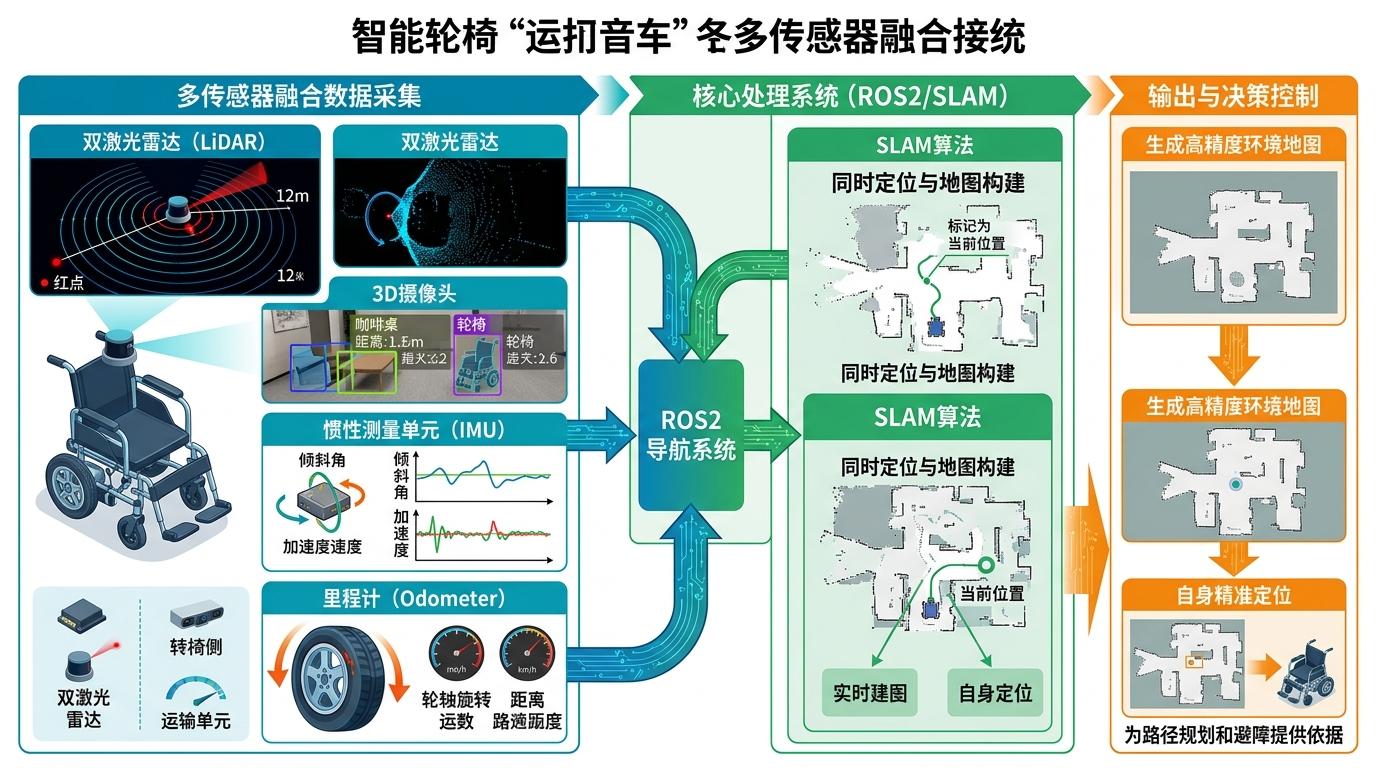
但真实的机制比这更精确:传感器数据会通过贝叶斯理论动态加权,比如激光雷达在强光下数据不准时,系统会自动提升超声波传感器的权重;当用户通过操纵杆给出明确指令时,环境数据的权重会降低,优先尊重用户意图。2026年DFKI的最新原型机在医院走廊测试中,通过这种方式将碰撞率降低了91.7%,同时保留了用户90%以上的操作控制权。
当你对着智能轮椅说“带我去咖啡机”,它能自己规划路线避开人群——这是全自主模式,但DFKI的测试显示,80%的用户更愿意用半自主的**共享控制模式**:自己握操纵杆,AI在后台默默调整。
这种模式的本质是“人机协作”:系统会实时预测用户的意图,比如你把操纵杆推到最大,系统会判断你想快速通过空旷区域,此时关闭部分避障限制;当你在狭窄走廊犹豫时,系统会自动微调方向,帮你对准通道中心。2025年的一项研究显示,使用共享控制的用户,完成同样路线的时间比纯手动快15%,比全自主模式的用户满意度高47%——因为他们觉得“这是我在开车,只是有个帮手”。
更有意思的是脑机接口共享控制:重度残障用户通过脑电波给出“前进”的指令,AI会结合环境数据判断“现在前方有行人,要不要减速”,并通过视觉反馈询问用户意见。这种“确认式辅助”既避免了脑电波识别的误差,又最大程度保留了用户的决策权。
2025年WHILL电动轮椅曝出蓝牙安全漏洞,攻击者能在10米内未经认证控制轮椅——这给智能轮椅行业敲响了警钟:技术再先进,安全和信任才是用户买单的前提。
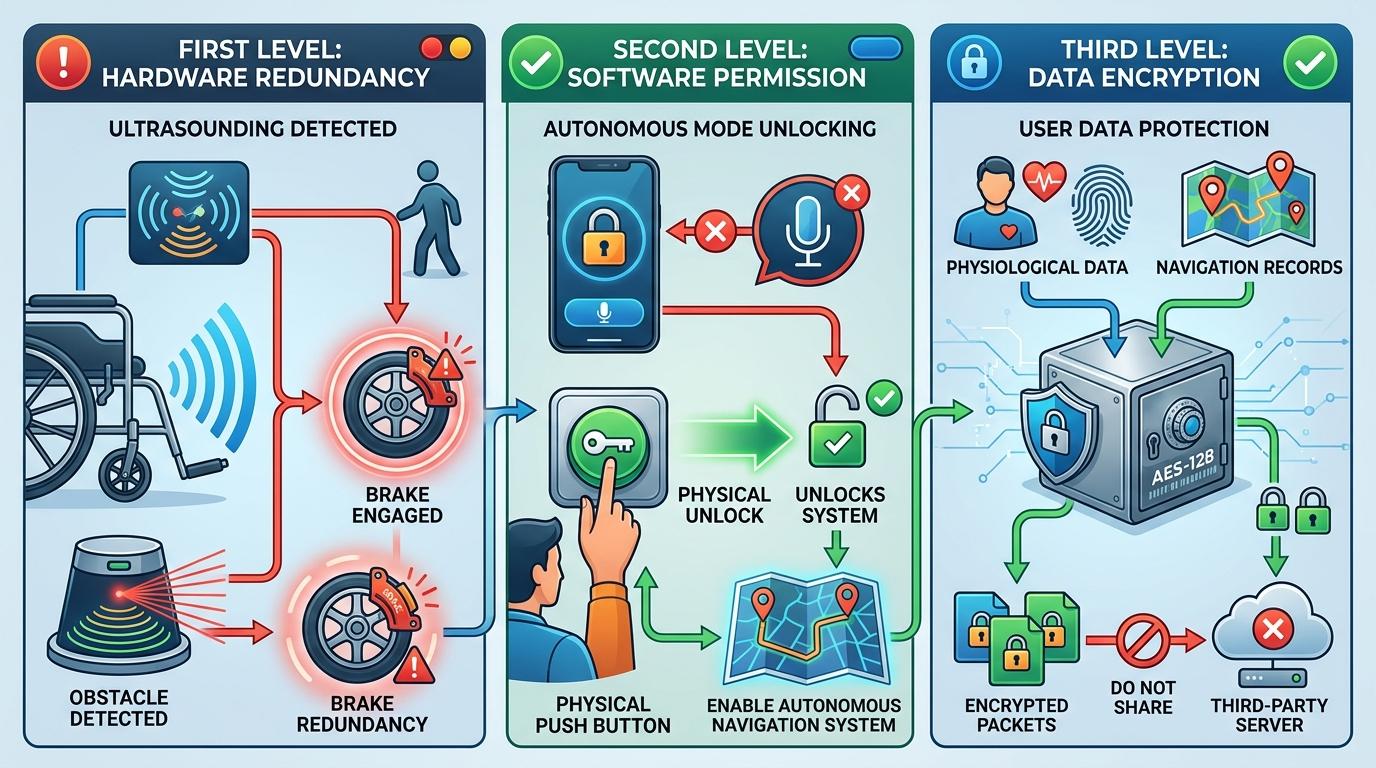
现在的智能轮椅普遍采用三级安全防护:第一级是硬件冗余,比如超声波传感器和激光雷达同时监测近距离障碍,只要有一个触发就会自动刹车;第二级是软件权限,全自主模式下必须通过物理按键解锁,防止语音指令被误触发;第三级是数据加密,用户的生理数据和导航记录会通过AES-128加密存储,且默认不共享给第三方。
但最大的挑战是AI决策的可解释性:当AI突然改变路线时,用户需要知道“为什么”——是前方有小孩,还是传感器坏了?DFKI的最新原型机会通过显示屏给出简单提示:“前方有移动障碍物,已调整路线”,而不是冷冰冰的机械动作。这种“透明化辅助”让用户的信任度提升了38%。
Christian Mandel至今还保留着十年前的头控轮椅原型,那上面没有激光雷达,只有一个简单的姿态传感器。他说:“我们做智能轮椅,不是为了证明机器比人强,而是为了让那些被身体限制的人,能像普通人一样自由地决定‘我要去哪’。”
技术的终极目标从来不是替代,而是共生。就像智能轮椅的共享控制模式一样,最好的人机关系,是你有你的意志,我有我的能力,我们一起把路走下去。
技术是拐杖,不是主人。