对抗知识焦虑,从看懂这条开始
App 下载
砸了400亿后,机器人还在卡在三道门槛
Agility Robotics|谷歌X|物理交互数据|风险投资|人形机器人|AI智能体|人工智能
对抗知识焦虑,从看懂这条开始
App 下载Agility Robotics|谷歌X|物理交互数据|风险投资|人形机器人|AI智能体|人工智能
2025年全球机器人领域砸下407亿美元风险投资,是2022年的两倍还多。舞台上的人形机器人能翻跟头、打太极,实验室里的机械臂能精准分拣垃圾,但你让它像你妈那样把散落的碗碟码进橱柜,它大概率会把盘子扫到地上。当资本喊着“通用机器人元年”的口号时,谷歌X和Agility Robotics的老兵们却在摇头:我们离真正的“家用机器人”,还差着至少三道没跨过去的坎。
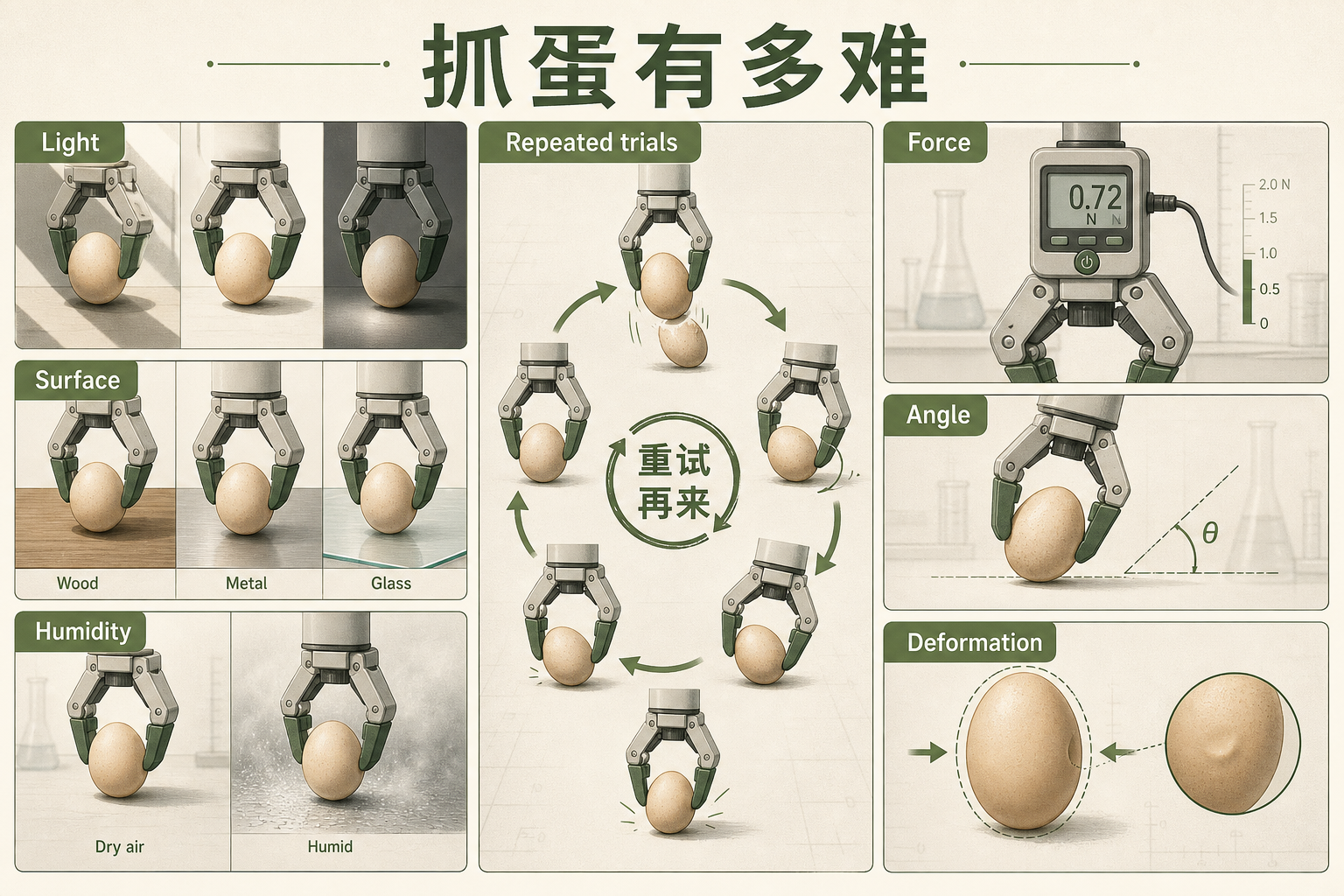
你可以把大模型训练想象成给AI投喂整个互联网的书和文章,但机器人要学的不是文字,是“怎么拿稳一个滑溜溜的鸡蛋”。这种物理交互数据的采集成本,是文字的上万倍——你得让机器人在不同光照、不同桌面、不同湿度下,反复抓握各种材质的鸡蛋,还要记录下力度、角度、鸡蛋的轻微形变。
谷歌X的Everyday Robots项目为了让机器人学会垃圾分类,2022年在仿真环境里跑了2.4亿次训练,相当于让虚拟机器人每天工作8小时、连轴转8200年。即便如此,当它遇到沾了咖啡渍的纸巾、套着塑料袋的易拉罐这些“非标准垃圾”时,正确率还是会暴跌30%。更棘手的是,机器人的学习数据是“高维”的——温度、摩擦力、甚至机器人关节的磨损程度,都会影响动作结果,这意味着它需要的训练样本,是大模型的百万倍都不止。
更值得关注的是,人类的很多动作是“无意识”的——你捡笔的时候不会先分析笔的重心,但机器人必须把每一个肌肉记忆拆解成几百个参数。这种“常识”的缺失,让机器人在看似简单的日常任务面前,成了最笨拙的新手。
你有没有试过被工业机械臂碰一下?那感觉像被铁块砸中——传统工业机器人的关节是刚性的,力量大到能直接捏碎骨头。但人类和世界互动时是“软”的:你开门时会根据门的阻力调整力度,你抱猫时会自动收住手劲,这种“顺应性”是机器人最难模仿的特质。
Agility Robotics的联合创始人Hurst教授花了10年研究“软驱动器”——一种能感知力度、像肌肉一样伸缩的关节。这种驱动器能让机器人在撞到人时自动卸力,但目前的问题是:成本是传统关节的5倍,寿命却只有后者的1/3。2023年特斯拉工厂的机器人伤人事件更凸显了这个矛盾:为了保证效率,工厂里的机器人必须有足够的力量,但这种力量一旦失控,就是致命的风险。
被忽略的关键在于,人类的“软”不仅是硬件,更是神经和肌肉的协同——你手指的触觉能直接传到大脑,让你瞬间调整动作。但机器人的传感器和处理器之间总有延迟,哪怕只有0.1秒,也足以让它把杯子碰倒。要解决这个问题,不是换个驱动器就行,而是要重新设计从硬件到软件的整个系统。
你可能听过“通用AI”的概念,但机器人需要的不是一个无所不能的超级大脑,而是一群分工明确的“小助手”——这就是Agentic AI,一种让多个AI模块协同工作的架构。比如,当你让机器人“把桌子上的杯子放到柜子里”时,需要一个AI负责识别杯子,一个负责规划路径,一个控制手臂的力度,还有一个负责判断柜子里的空间够不够。

谷歌DeepMind的RT-2模型就采用了这种思路:它把视觉、语言、动作三个AI模块拧在一起,让机器人能理解“拿一个能当锤子的东西”这种抽象指令。但问题是,这些模块之间的“沟通成本”极高——如果识别AI把杯子看成了碗,动作AI就会用错力度,最后整个任务彻底失败。2025年的测试显示,RT-2在实验室里的成功率是90%,但放到真实的家庭环境中,成功率立刻跌到了40%——因为家里的光线、桌子的材质、柜子的把手,都是实验室里没见过的变量。
更现实的挑战是,这些AI模块的训练数据是割裂的:识别AI学的是图片,动作AI学的是机械运动,要让它们听懂同一种“语言”,还需要一个能翻译所有数据的“中间层”——这又是一个需要海量数据和算力的难题。
当我们为机器人的翻跟头、打太极惊叹时,别忘了那些在仓库里反复分拣垃圾、在实验室里反复抓握鸡蛋的“笨拙机器人”——它们才是通用机器人真正的铺路石。
真正的通用机器人,从来不是突然出现的奇迹,而是无数次试错堆出来的必然。 它不会像科幻电影里那样突然走进你家,而是先从帮你分拣垃圾、帮工厂搬运零件开始,一点点学会适应这个充满不确定性的真实世界。资本的狂欢可能会退潮,但机器人走进人类生活的脚步,只会越来越快——毕竟,我们已经等了太久,等一个能帮我们把碗碟码进橱柜的“笨帮手”。