对抗知识焦虑,从看懂这条开始
App 下载
百元手机雷达,能看见墙后的东西
算法代码|非视距成像|手机激光雷达|MIT媒体实验室|多模态视觉|人工智能
对抗知识焦虑,从看懂这条开始
App 下载算法代码|非视距成像|手机激光雷达|MIT媒体实验室|多模态视觉|人工智能
想象你站在拐角处,不用探头,就能知道墙后有没有来人——这不是谍战片的黑科技,现在用一台不到100美元的手机激光雷达就能实现。MIT媒体实验室的研究团队,把原本只能在实验室里、用百万级设备完成的「非视距成像」,搬到了消费级硬件上。他们甚至公开了算法代码,任何人都能试着让自己的手机拥有「透视」墙后的能力。但你可能会问:手机那点功率的激光,怎么可能穿透层层反射捕捉到墙后的信号?
要理解非视距成像,你可以把激光雷达想象成一个会数数的手电筒——它发出的每一束激光脉冲,碰到物体后会反射回来,通过计算光子往返的时间,就能算出距离,画出3D地图。而「墙后透视」的秘密,就藏在那些没直接回来的光子里:激光先打在墙面这个「中继站」上,散射到墙后,碰到隐藏的物体再反射回墙面,最后才慢悠悠回到传感器。
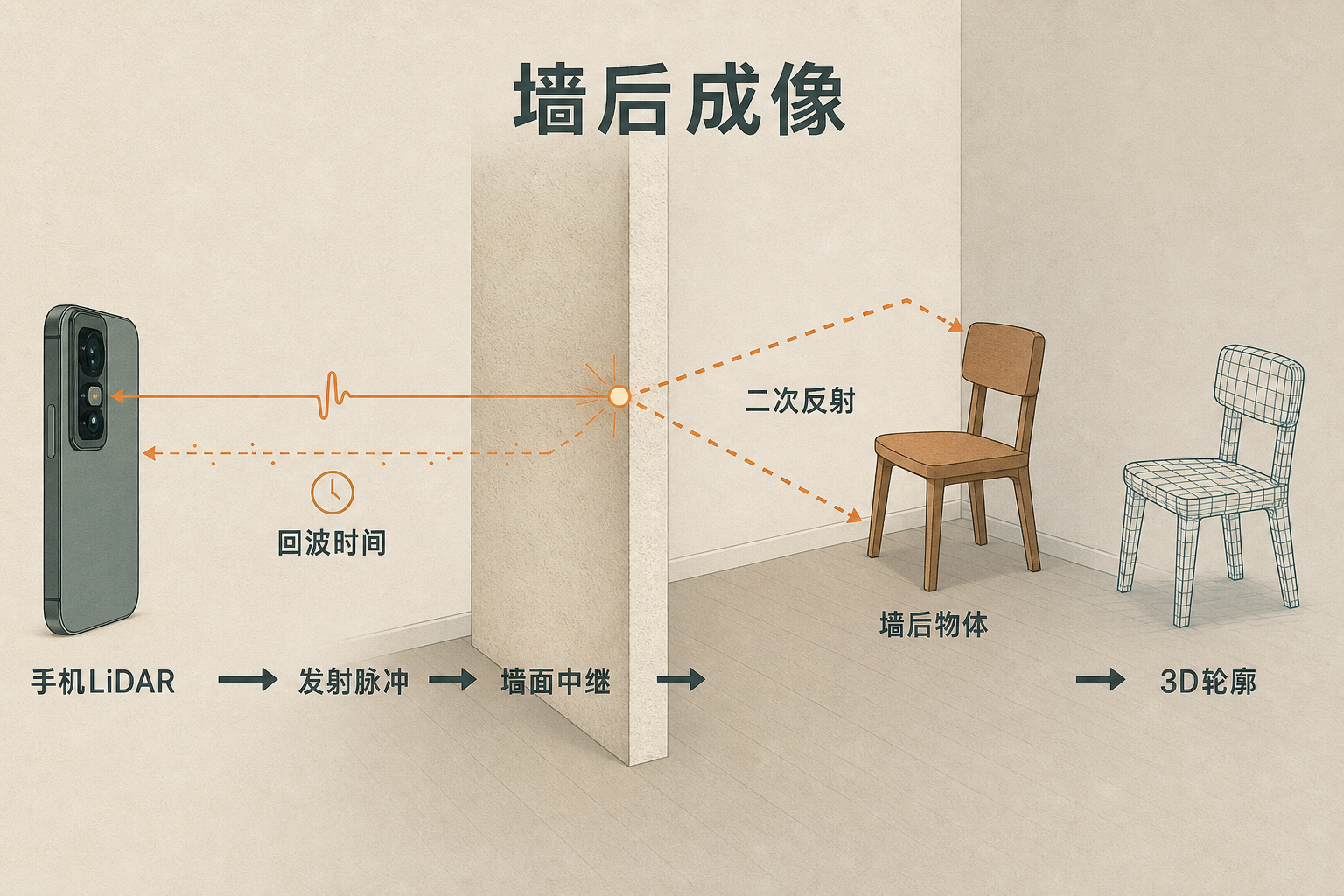
但这些经过两次漫反射的光子,信号强度会衰减到原来的十亿分之一甚至更低,就像在噪音里找一根针。过去的实验室设备,用的是百万美元的单光子探测器和高功率激光,才能把这根「针」捞出来。而手机上的消费级激光雷达,为了眼睛安全,功率被严格限制,分辨率也只有实验室设备的几百分之一,连直接成像都容易有噪点,更别说抓墙后的微弱信号了。
这个难题,靠的不是升级硬件,而是换了一种「看」的方式。
研究团队的核心突破,是一套「多帧信号融合算法」——说穿了,就是让手机多拍几百张「废片」,再把这些废片里的有效信号拼起来。
你可以把这个过程类比成手机拍夜景:开夜景模式时,手机会快速连拍十几张照片,把每张里没糊的细节挑出来,合成一张清晰的照片。而MIT的算法更进了一步:它利用手机自然晃动产生的视角变化,相当于给激光雷达「虚拟」出了一个更大的探测孔径——就像用很多小镜头拼成一个大望远镜,能捕捉到更多角度的微弱信号。

具体来说,每一束激光打出去,都会在墙面上留下一个光斑,这个光斑里就藏着墙后物体的轮廓信息。算法会把几百张照片里的光斑位置、强度一一对应起来,通过数学模型过滤掉随机噪音,把属于同一个物体的信号叠加放大。原本单帧里几乎看不见的墙后椅子,在几百帧信号的叠加下,轮廓会一点点清晰起来。
更关键的是,这套算法不需要任何特殊校准——你只要拿着手机对着墙晃一晃,它就能自动完成信号融合。实验里,团队用只有100个像素的手机激光雷达,成功重建了墙后静态物体的3D轮廓,还能跟踪移动目标的轨迹,精度能达到厘米级。
但它也有局限。
目前的系统只能输出稀疏的3D点云,不是你想象中高清的「墙后直播」;而且它默认目标的形状和运动是连续的,如果墙后有人突然做个大幅度动作,算法可能会「看」糊。
比起「看见墙后」这个功能本身,更值得注意的是这项技术的「民主化」。过去,非视距成像这种前沿技术,只能被少数实验室和大企业掌握,应用场景也被局限在自动驾驶、高端安防这些领域。但现在,只要你有一台带激光雷达的手机,再下载公开的代码,就能自己做「透视」实验。
这种技术下放,往往会催生很多研究者想不到的应用:比如给盲人做的避障辅助设备,能提前感知拐角处的自行车;比如家用机器人,能在堆满杂物的客厅里精准找到藏在沙发后的遥控器;甚至可能有人用它来做创意艺术装置,让光影穿过墙壁在画布上作画。
当然,技术的普及也带来新的隐忧——如果人人都能「看见墙后」,隐私边界该怎么界定?但MIT团队的研究者认为,与其限制技术,不如提前讨论规则:比如给这类功能加上权限限制,或者开发能「屏蔽」激光的材料,就像现在的隐私玻璃一样。
目前,团队已经把所有代码开源,他们希望更多人能参与进来,改进算法,拓展应用。毕竟,最有想象力的应用,永远不是实验室里的科学家想出来的。
当我们还在惊叹手机能拍4K视频时,它已经悄悄拥有了「看见看不见的东西」的能力。这不是什么科幻片的预言,而是技术民主化带来的必然——高端实验室的黑科技,正在以普通人能接触到的方式,一点点改变我们和世界的互动方式。
技术的终极价值,从来不是少数人的玩具。
未来或许不用太久,你掏出手机,就能知道拐角处有没有来车,沙发底下有没有掉钥匙。那些曾经被墙壁挡住的世界,会在激光的一次次反射中,慢慢变得清晰可见。