对抗知识焦虑,从看懂这条开始
App 下载
四百万辆特斯拉卡壳,自动驾驶卡在硬件上
端到端时序Transformer|FSD算法|内存带宽|HW3计算机|特斯拉|自动驾驶|人工智能
对抗知识焦虑,从看懂这条开始
App 下载端到端时序Transformer|FSD算法|内存带宽|HW3计算机|特斯拉|自动驾驶|人工智能
当你坐在2019到2023款的特斯拉里,盯着中控屏上“完全自动驾驶”的购买按钮时,可能不会想到——这个被反复承诺的功能,永远无法通过软件更新真正落地。不是算法不够聪明,是车里的那块HW3计算机,内存带宽只有新一代硬件的1/8,连处理高分辨率3D环境感知的基本需求都满足不了。那些曾被“软件定义汽车”的愿景打动的车主,突然发现自己的车被硬件锁死了未来。
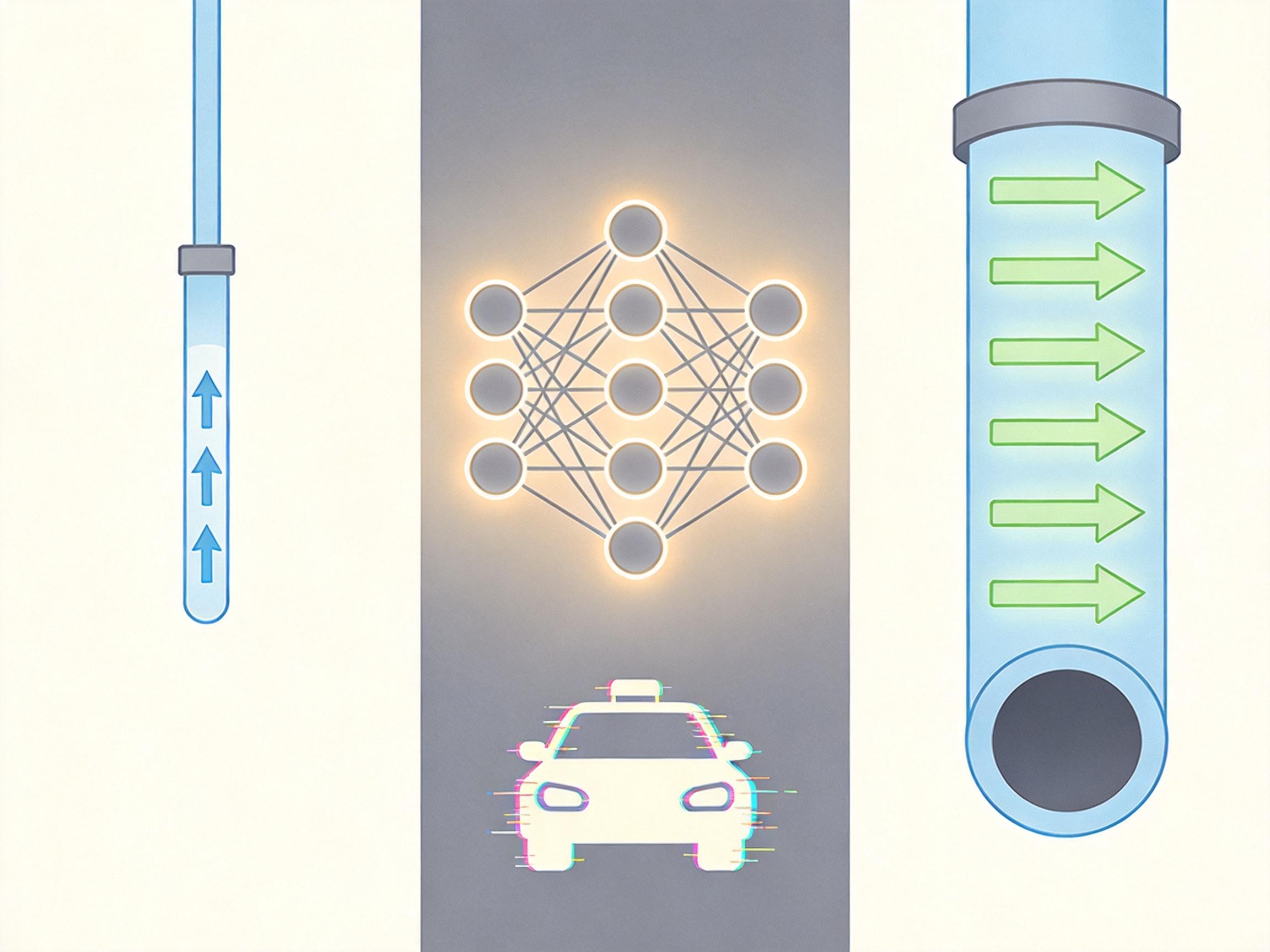
内存带宽不是什么玄乎的技术术语——你可以把它想象成厨房的下水管道,HW3的管道只有筷子粗,而无人监督的自动驾驶需要同时排走8盆洗菜水。最新的FSD算法采用端到端时序Transformer架构,要像人类大脑一样记住15秒内的路况变化,还要处理8个摄像头的实时数据流。HW3的带宽瓶颈会让系统出现“微犹豫”:遇到路口慢半拍,避让行人时打方向抖一下,这些看似微小的延迟,在无人监督的场景里就是致命的安全隐患。
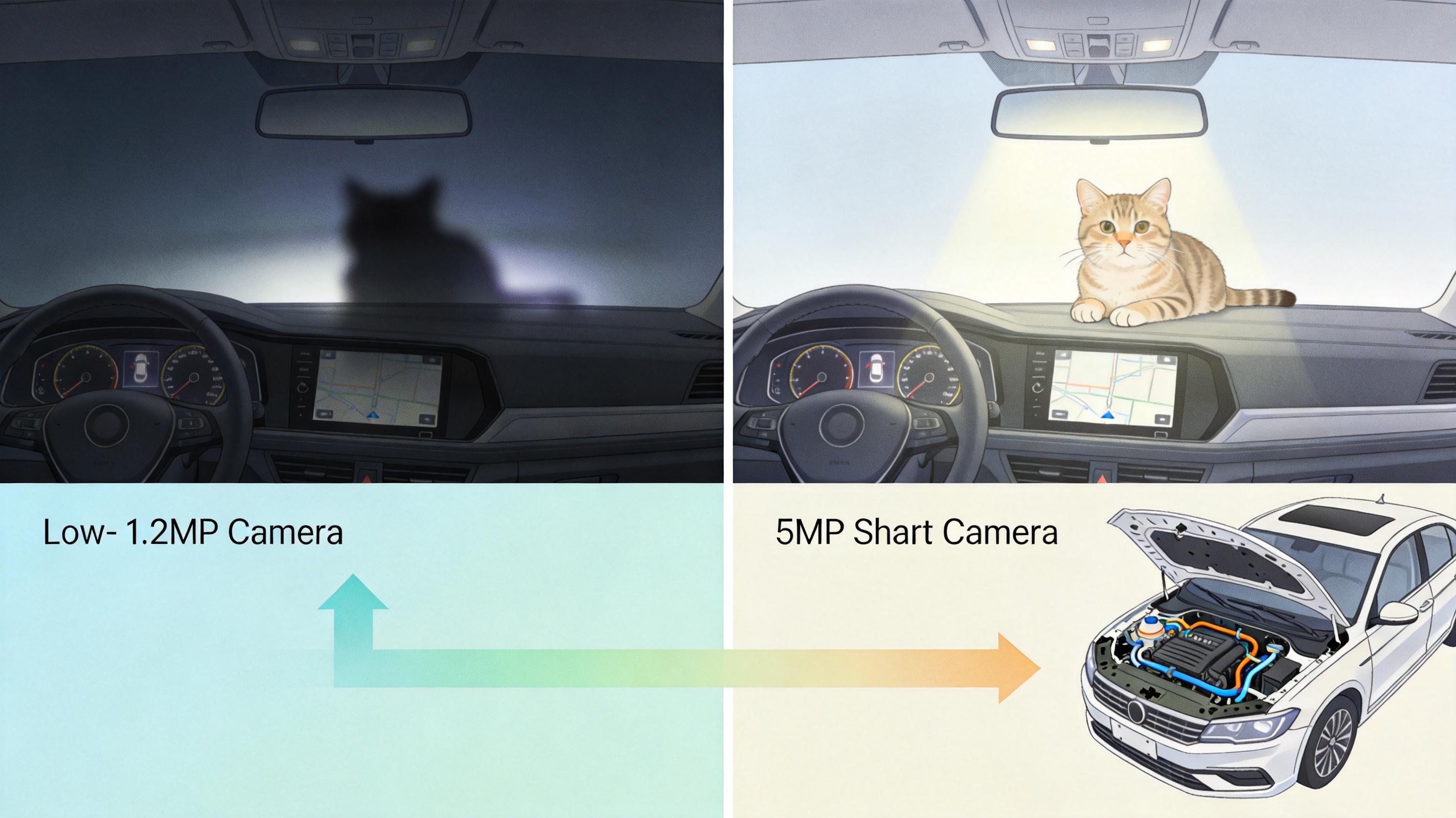
更现实的问题是升级成本。车主若想解锁真正的无人自动驾驶,不能只换计算机,必须连摄像头一起换——HW4的500万像素摄像头能在低光环境下看清路边的猫,而HW3的120万像素摄像头只能模糊识别出“有个东西”。特斯拉计划在大城市建“微型工厂”完成升级,不是因为服务中心不够大,是因为整个过程要拆仪表板、动冷却液管路,复杂程度不亚于给汽车做一场心脏手术。
这场硬件瓶颈的暴露,戳破了“软件万能”的神话。自动驾驶的演进从来不是软件单方面的狂飙,而是软硬件的协同赛跑。过去特斯拉靠OTA更新不断刷新功能上限,让用户相信“今天的车能通过软件变成明天的车”,但现在HW3的局限证明:当算法对算力的需求突破硬件物理边界时,软件再聪明也无济于事。这不是某一家公司的困境,而是整个自动驾驶行业的转折点——从“软件优先”转向“软硬件深度耦合”。
对于用户来说,选择变得更现实了:是花大价钱升级硬件,换取不确定的无人自动驾驶体验,还是接受HW3的“Lite版”FSD,继续做车辆的监督者?而对于行业,这场转折意味着未来的自动驾驶汽车,必须在设计初期就把硬件的冗余度、可扩展性算进去,就像盖房子时要考虑十年后能不能加装电梯。
技术的边界,往往比我们想象的更坚硬。那些曾被许诺的“完全自动驾驶”,最终要等硬件追上来,才能真正驶向现实。