对抗知识焦虑,从看懂这条开始
App 下载
仿人手+数据闭环,机器人学会人类手艺
精准移液|机器人烹饪|身体化差距|数据闭环系统|仿人机械手|具身智能|人工智能
对抗知识焦虑,从看懂这条开始
App 下载精准移液|机器人烹饪|身体化差距|数据闭环系统|仿人机械手|具身智能|人工智能
2026年5月的一段视频里,一只和人手一模一样的机械手正稳稳握着菜刀,把番茄切成厚薄均匀的薄片——它刚完成了敲蛋、搅拌蛋液的步骤,接下来还要把煎蛋盛进盘子里。这不是电影特效,是初创团队的机器人完成的整套烹饪流程。更让人惊讶的是,它还能弹钢琴、拧魔方,甚至在实验室里精准移液。这背后的核心,是一套能让机器人像人类一样积累‘手艺’的闭环系统,而关键的突破口,是解决了困扰机器人行业多年的‘身体化差距’难题。
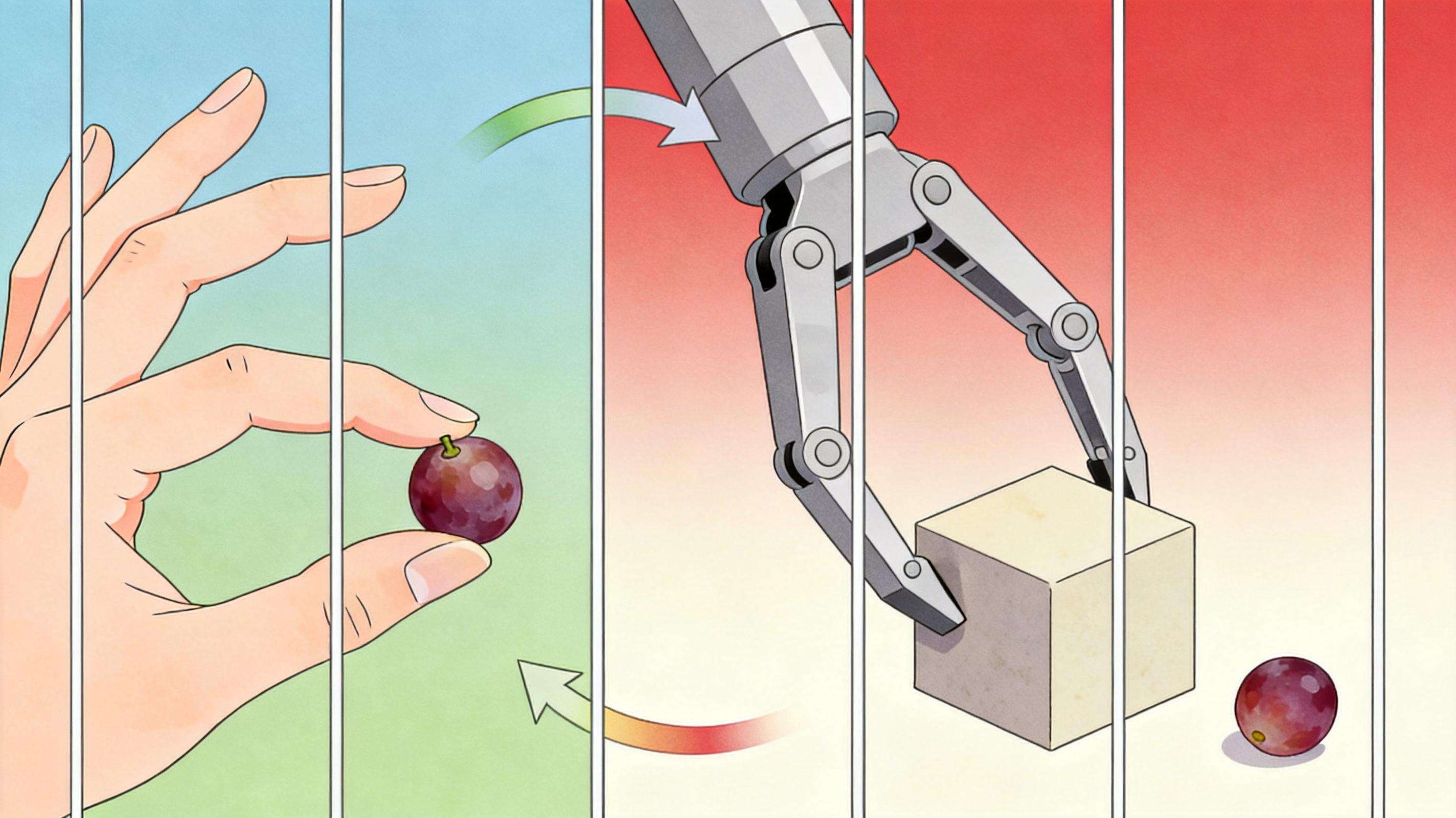
所谓‘身体化差距’,就是机器人的身体结构和人类差异太大,导致人类的动作数据没法直接教给机器人。比如传统工业机器人常用的两指夹爪,和人手的灵活度完全不在一个维度——人类能轻松捏起一颗葡萄,夹爪却只能抓握规则形状的物体,更别说完成敲蛋、系鞋带这类精细动作。
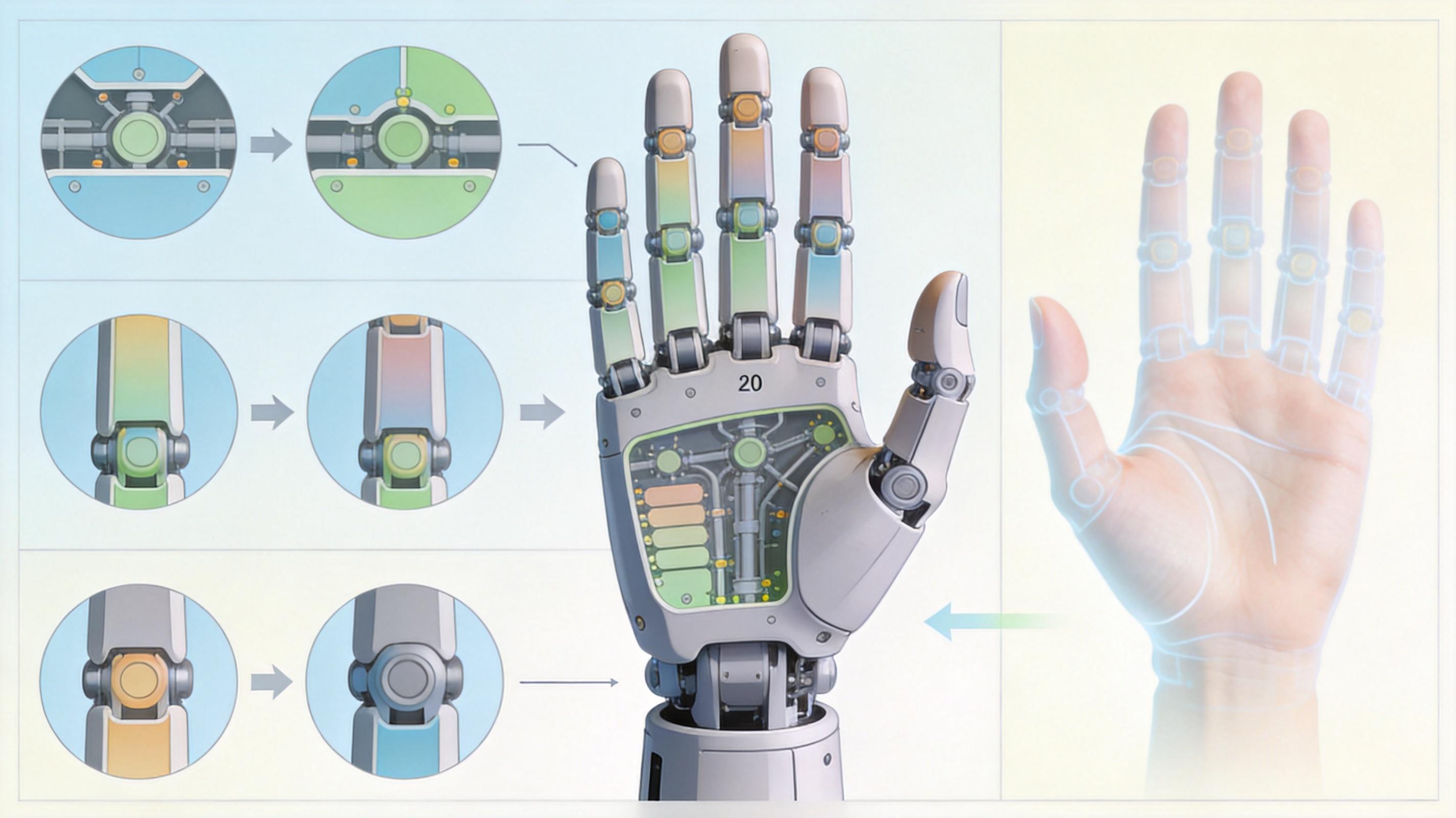
这个团队的解法很直接:造一只和人手1:1复刻的机械手。它有20个自由度,每个关节的活动范围、力度都和人手对齐,甚至连手掌的大小、手指的弧度都分毫不差。这样一来,人类用手能做的动作,机器人的‘手’理论上都能复刻,而不是像以前那样,要把人类的动作‘翻译’成机器人能理解的机械指令——这个翻译过程,恰恰是数据损耗的重灾区。
为了给这只手‘喂’数据,他们还做了一款轻便的传感手套。工人戴上手套干活时,手套会同步记录手指的关节角度、施力大小,甚至是接触物体时的压力分布,这些数据能直接映射到机械手上,不需要额外的转换处理。更关键的是,这款手套的成本只有传统数据采集设备的1%,工人戴着它能正常完成日常工作,不会像以前那样,要在专门的实验室里对着设备做动作。
光有仿人手和传感手套还不够,真正让机器人‘学会手艺’的是一套完整的数据闭环。
第一步是数据采集:除了手套的动作和触觉数据,他们还会同步采集工人第一视角的操作视频,把‘怎么做’和‘为什么这么做’的视觉信息结合起来。比如切番茄时,视频能记录下番茄的摆放位置、菜刀的切入角度,手套数据则记录下手腕的力度变化,两者结合,就能让机器人理解‘怎么切才不会切到手’。
第二步是仿真训练:他们搭建了一个能以现实43万倍速度运行的仿真平台。机器人可以在虚拟环境里反复练习同一个动作——比如敲蛋,它能在一小时内完成几万次尝试,每次失败都会自动调整力度和角度,直到找到最优的动作模式。这种虚拟训练的成本几乎为零,还能避免现实中损坏设备的风险。
第三步是现实反馈:当机器人在现实中执行任务时,传感器会实时把动作数据传回系统,和训练数据对比,如果出现偏差,系统会自动调整模型参数,让机器人下次做得更好。比如第一次切番茄切歪了,系统会分析是力度不够还是角度不对,然后更新训练模型,下一次切的时候就会自动修正。
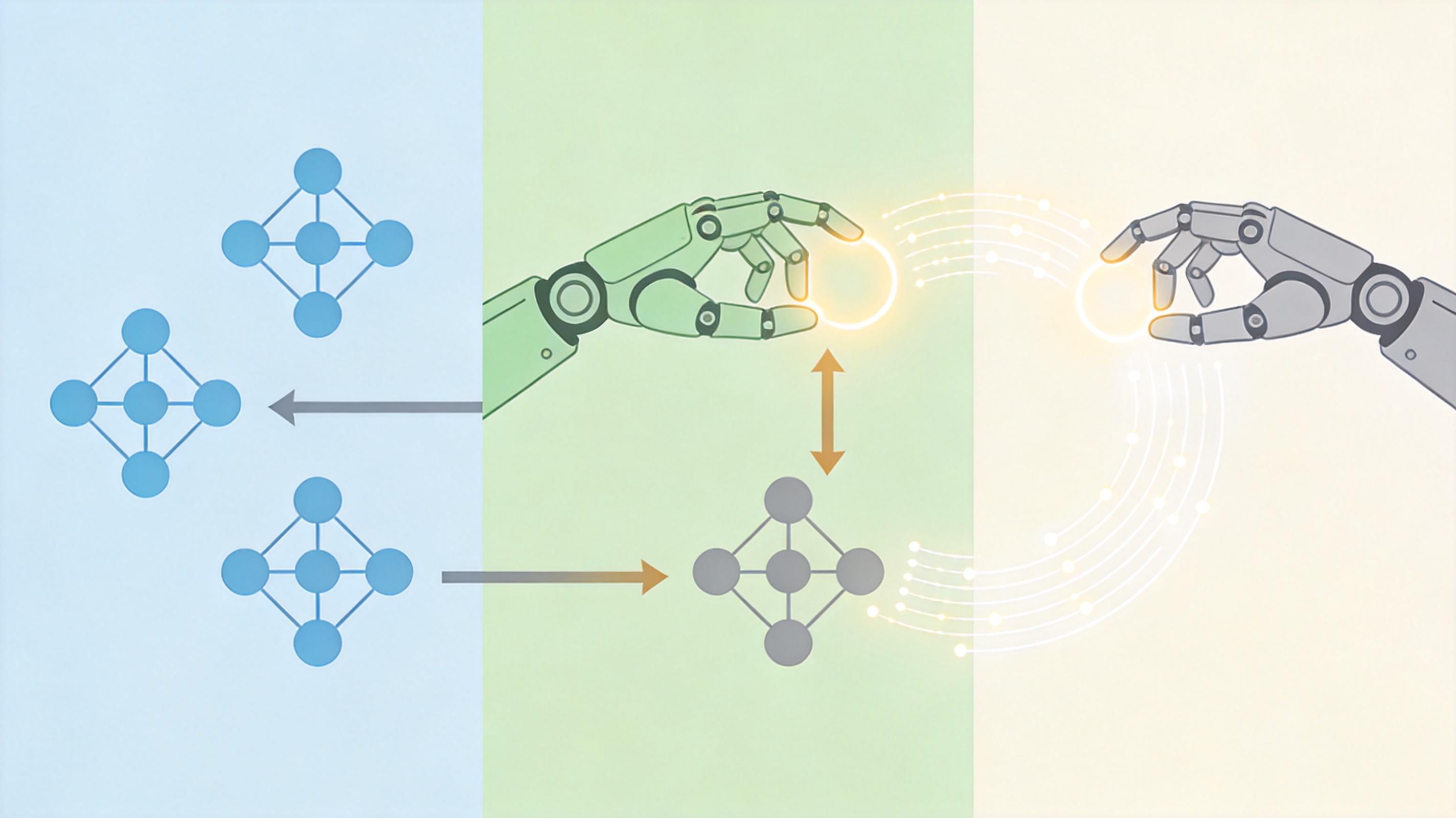
这个闭环的核心是‘数据复用’:以前采集的人类数据只能用一次,现在因为机械手和人手结构一致,这些数据能直接用来训练机器人,而且机器人在现实中产生的数据,又能反过来优化模型,形成‘采集-训练-执行-优化’的循环,让机器人的能力像人类一样,越用越熟练。
这套系统的潜力已经在多个场景得到验证:在工厂里,它能精准完成线束装配这类需要精细操作的工作;在实验室里,它能代替研究员完成移液、样本处理等重复任务;甚至在家庭场景,它能帮人完成简单的烹饪。团队的创始人透露,他们已经在和欧洲的汽车、医药企业谈合作,这些行业对精细操作的需求极高,而且面临劳动力短缺的问题。
但绕不开的难题也不少。最直接的是伦理问题:如果工人戴着数据手套干活,采集的数据用来训练机器人,而机器人最终可能会替代这些工人的工作,那工人是否应该获得相应的补偿?目前团队还没有明确的解决方案,只表示这需要和客户协商。
技术上也有瓶颈:虽然机械手能复刻人类的动作,但机器人的‘大脑’还没法像人类一样应对突发情况。比如切番茄时,如果番茄突然滚了一下,人类会立刻调整手势,但机器人可能会直接切空。另外,机器人的续航时间只有2-4小时,还没法长时间连续工作。
更现实的是成本问题:虽然手套的成本很低,但整套机器人系统的价格依然不菲,对于中小企业来说,还是一笔不小的投入。
当机器人能像人类一样拿起菜刀、敲开鸡蛋,我们看到的不只是技术的进步,更是人与机器边界的模糊。过去我们总说机器人是‘工具’,但现在,它开始像人类一样积累经验、学习技能——这或许才是真正的‘通用机器人’的雏形。
数据闭环让机器人的能力不再是一次性的,而是能持续迭代、自我优化,这就像人类通过不断练习掌握手艺一样。但随之而来的伦理问题、就业挑战,也需要我们提前思考。毕竟,当机器人越来越像人时,我们需要回答的,不只是‘它能做什么’,更是‘它应该做什么’。
数据闭环,是机器人学会‘手艺’的钥匙。